Einleitung
Ein prothetischer Ersatz der unteren Extremität muss Alltagstätigkeiten wie Stehen, Gehen, Hinsetzen und Aufstehen ermöglichen und unterstützen. Konventionelle Prothesenfüße, die innerhalb eines Gangzyklus Energie aufnehmen, speichern und wieder zurückführen („energy storage and return“, ESR), unterstützen Beinamputierte vorrangig beim Gehen und Stehen auf ebenem Untergrund. In unterschiedlichen Studien konnte gezeigt werden, dass ESR-Füße Vorteile gegenüber SACH-Füßen („solid ankle cushioned heel“) generieren können 1 2. Allerdings sind Alltagssituationen wie das Gehen bergauf und bergab sowie das Stehen an solchen Schrägen für transtibial (TTA) und transfemoral Amputierte (TFA) generell eine Herausforderung 3 4. Dies liegt unter anderem an der eingeschränkten Anpassungsfähigkeit konventioneller Prothesenfüße in Dorsal- und Plantarflexion. Im Gegensatz zu einem intakten menschlichen Fuß haben diese Füße kein Gelenk, und ihre Anpassung ist durch die Verformung der Carbonfeder limitiert. Diese Einschränkungen rufen Kompensationsstrategien beim Anwender hervor, die oft mit hohen Belastungen in den erhaltenen Gelenken und vergrößerter muskulärer Anstrengung einhergehen.
Verschiedene Prothesenhersteller haben in den letzten Jahren mechatronische Konzepte entwickelt und in aktuellen mikroprozessorgesteuerten Prothesenfüßen (MPF) umgesetzt, um die Anpassung an unterschiedliche Alltagssituationen weiter zu verbessern. Dazu zählen folgende Aspekte:
- ein zusätzliches Rotationsgelenk, das einen erweiterten Bewegungsumfang in Dorsal- und Plantarflexion ermöglicht und als eine Art Sprunggelenk fungiert,
- eine aktive Steuerung des Widerstands in Dorsal- und Plantarflexion,
- Anpassungen an die Untergrundneigung (Schwungphasen- und Standphasenanpassung, Realtime- oder inkrementelle Anpassung) sowie
- eine aktive Energiezufuhr über einen Motor (in dieser Studie nicht untersucht).
In der hier vorgestellten Studie wurde untersucht, welche der verschiedenen Konzepte, die in aktuellen mikroprozessorgesteuerten Prothesenfüßen (MPF) implementiert wurden, Vorteile für Amputierte generieren und zu einer natürlicheren Lokomotion sowie einem physiologischeren Stand führen. Dazu wurden biomechanische Parameter für das Gehen an einer Rampe sowie das Stehen an Schrägen für einseitig beinamputierte (TTA und TFA) Probanden untersucht. Zusätzlich zu ihrem Alltagsfuß wurden fünf MPF verschiedener Hersteller getestet. Die Hypothese lautete, dass die Designmerkmale und die unterschiedlichen Konzepte dieser MPF unterschiedliche Einflüsse auf die untersuchten biomechanischen Parameter in Abhängigkeit vom Amputationsniveau ausüben.
Methode und Setup
Probanden
Jeweils vier einseitige TTA- und TFA-Probanden nahmen an der Studie teil (TTA: Alter 56,2 ± 12,0 Jahre, Masse 79,8 ± 8,1 kg, Körpergröße 178 ± 4 cm; TFA: Alter 44,5 ± 3,0 Jahre, Masse 81,9 ± 8,0 kg, Körpergröße 178 ± 7 cm). Die Probanden waren mindestens seit 3 Jahren amputiert und ließen sich in die Mobilitätsgrade 3 und 4 einordnen. Alle waren mit nicht-mikroprozessorgesteuerten Prothesenfüßen (ESR) und die TFA-Gruppe mit mikroprozessorgesteuerten Kniegelenken vorversorgt. Als Referenz diente eine Kontrollgruppe von Nichtamputierten (NA). Die Studie wurde von der lokalen Ethikkommission der Universitätsmedizin Göttingen (UMG) genehmigt und in Übereinstimmung mit der Deklaration von Helsinki durchgeführt.
Prothetische Versorgung in der Studie
In der Studie wurden fünf unterschiedliche mikroprozessorgesteuerte Prothesenfüße (MPF) untersucht:
- Meridium (Otto Bock, Deutschland)
- Elan (Version 1, Blatchford, Großbritannien)
- Proprio (Össur, Island)
- Triton Smart Ankle (TSA; Otto Bock, Deutschland)
- Raize (Fillauer, USA)
Alle TFA-Probanden wurden für die Dauer der Studie mit einem einheitlichen prothetischen Kniegelenk ausgestattet (Genium, Otto Bock, Deutschland). Nach der statischen und dynamischen Optimierung des jeweiligen Fußes gemäß Herstellerempfehlungen wurde ein Funktionstraining durchgeführt. Danach hatten die Probanden mindestens eine Woche Zeit, sich an den MPF zu gewöhnen. Die unterschiedlichen MPF haben unterschiedliche Eigenschaften, die Stehen und Gehen beeinflussen können. Diese sind in den Tabellen 1 und 2 aufgeführt.
Experimentelles Setup
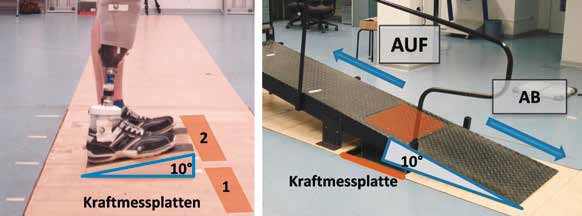
Bei allen Füßen wurden Stehen und Gehen in unterschiedlichen Situationen untersucht. Das Stehen wurde auf ebenem Untergrund („EBENE“), an einer 10° ansteigenden Rampe („AUF“) und an einer 10° abfallenden Rampe („AB“) untersucht (Abb. 1a). Das Gehen wurde ebenfalls an einer 10°-Rampe für die Situationen bergauf („AUF“) und bergab („AB“) untersucht (Abb. 1b). Die Bodenreaktionskräfte wurden beim Stehen mit zwei Kraftmessplatten (Kistler, Schweiz) (s. Abb. 1a: jeweils das rechte und linke Bein separat) und für das Gehen mit einer Kraftmessplatte (s. Abb. 1b) aufgezeichnet. Kinematische Daten definierter Positionen am Körper wurden mit 12 Vicon-Kameras (Vicon Motion Systems, Großbritannien) gemessen. Die kinematischen und kinetischen Daten wurden prozessiert und folgende biomechanische Parameter berechnet:
- die Verteilung der Bodenreaktionskräfte zwischen Prothesen- und erhaltener Seite,
- die Gelenkwinkel (sagittale Sprunggelenk‑, Knie- und Hüftwinkel) und
- die korrespondierenden extern wirkenden sagittalen Momente.
Detailliertere Erläuterungen zu den verwendeten Methoden und zum experimentellen Aufbau sind in 5 zu finden.
Ergebnisse der Studie
Veränderungen der biomechanischen Parameter in Abhängigkeit von der untersuchten Situation und vom verwendeten Prothesenfuß konnten sowohl für das Stehen als auch für das Gehen an Rampen beobachtet werden.
Stehen auf Schrägen
Für das Stehen an Schrägen konnte gezeigt werden, dass die Bodenreaktionskraft, die Gelenkwinkel und die extern wirkenden Gelenkmomente in Abhängigkeit von Situation und Prothesenfuß variieren. Die größten von den verschiedenen MPF verursachten Differenzen in den biomechanischen Parametern wurden für das Stehen an einer abfallenden Rampe (AB) beobachtet. Die wichtigsten Resultate bezüglich der einzelnen Eigenschaften der MPF werden im Folgenden erläutert.
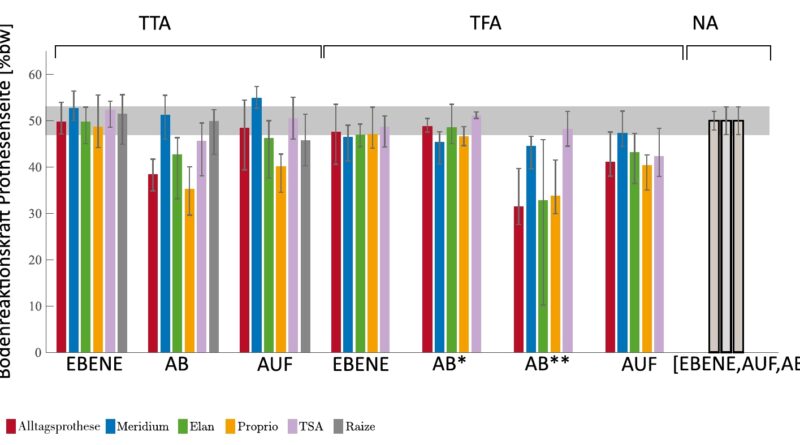
Für das Stehen auf ebenem Untergrund wurden symmetrische Bodenreaktionskräfte zwischen Prothesenund kontralateraler Seite beobachtet (ca. 50 % Körpergewicht [„bw“] pro Bein). Dies ist unabhängig vom verwendeten Prothesenfuß (Abb. 2). Dagegen wurden für das Stehen an Schrägen („AUF“ & „AB“) näherungsweise symmetrische Kräfte lediglich für die MPF ermittelt, die in der Lage waren, sich vollständig an die Schräge anzupassen (s. Abb. 2, vgl. Tab. 1 für den Bewegungsumfang). Für die MPF und die konventionellen Prothesenfüße, die sich nicht oder nur unvollständig an die Neigung anpassen, wurde eine verringerte Bodenreaktionskraft auf der Prothesenseite und vice versa eine Erhöhung auf der kontralateralen Seite ermittelt.
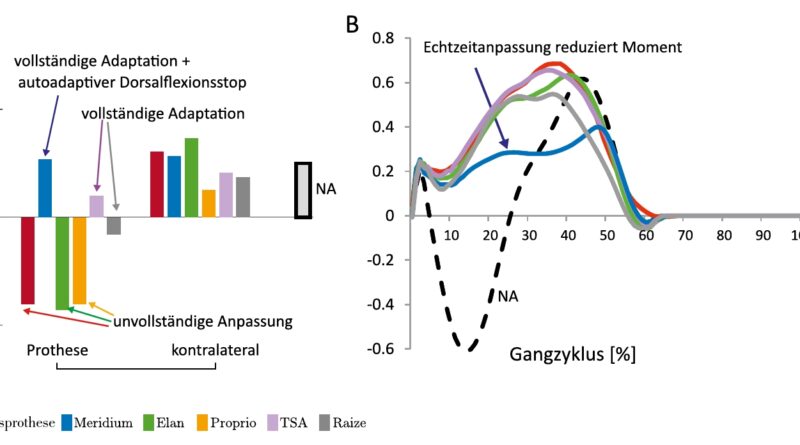
Die geänderten Bodenreaktionskräfte und die an die Situation angepasste Kinematik (s. Abb. 2) 6 führen zu Änderungen und Unterschieden in den wirkenden Gelenkmomenten. Neben kleinen Differenzen für das Stehen auf ebenem Untergrund fallen besonders die Unterschiede zwischen den Füßen für das Stehen an „AUF“ und „AB“ auf (Kniemomente und Hüftmomente 7). Dabei zeigte sich, dass TTA und TFA lediglich mit einem der fünf untersuchten MPF Gelenkmomente generieren, die mit denjenigen der Kontrollgruppe vergleichbar sind. Eine vollständige Adaptation an die Schräge in Kombination mit einem autoadaptiven Dorsalflexionsstopp wurden als die Eigenschaften identifiziert, die dies ermöglichen (Abb. 3).
Gehen auf Rampen
Wie für das Stehen konnten auch funktionelle Unterschiede zwischen den MPF für das Gehen auf Rampen identifiziert werden. Es zeigte sich, dass ein MPF mit einer Echtzeitanpassung an die Geländeneigung Vorteile generiert. Für das Gehen auf einer Rampe reduzierte sich das kniestreckende Moment und erleichtert damit das Überrollen des Unterschenkels über den Fuß (Meridium, Abb. 3b). Im Gegensatz dazu bremst dieser Fuß den Anwender durch seine Adaptation an die Neigung beim Hinuntergehen der Rampe und verringert damit das wirkende kniebeugende Moment (für TTA). Für die inkrementell anpassenden MPF konnte zum Messzeitpunkt nur eine geringe Anpassung im Vergleich zu dem MPF mit einer Echtzeitanpassung ermittelt werden. Für sichtbare Effekte müssten weitere Schritte auf der Rampe untersucht werden, da diese wahrscheinlich erst an längeren Rampen zum Tragen kommen (vgl. Abb. 1) 8.
Neben den wirkenden Momenten in der Standphase eines Gangzyklus sind die Gelenkwinkel des Prothesenfußes in der Schwungphase von Interesse. Auch hier zeigen sich Unterschiede zwischen den einzelnen MPF. Der Proprio-MPF besitzt einen Motor und erzeugt damit eine aktive Dorsal-Plantarflexion (ca. 5°) in der Schwungphase. Meridium und Elan hingegen stellen eine dorsalflektierte Stellung des Fußes am Ende der Standphase ein und halten diese über die Schwungphase hinweg konstant (Meridium ca. 4 bis 7°, vgl. 9; Elan ca. 3°). Eine dorsalflektierte Fußstellung kann eine erhöhte Bodenfreiheit in der Schwungphase erzeugen und dadurch einen Sicherheitszugewinn generieren (die Wahrscheinlichkeit von Stolpern und Hängenbleiben wird verringert).
Diskussion und Fazit
In der vorgestellten Studie konnte gezeigt werden, dass die unterschiedlichen Konzepte und Funktionen der einzelnen MPF das Verhalten von Beinamputierten beim Stehen und Gehen auf Rampen beeinflussen. Für ein natürliches Stehen an Rampen wurden zwei Schlüsselfunktionen identifiziert:
- die Fähigkeit, sich vollständig an die Neigung anzupassen (Gelenkwinkeladaptation),
- die Fähigkeit, den Fuß nach erfolgter Anpassung in dorsale Richtung zu sperren.
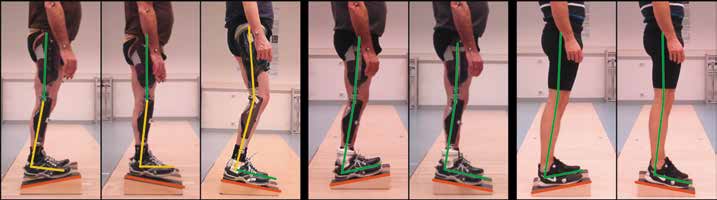
Eine natürlichere Körperhaltung für Beinamputierte ist sowohl durch eine symmetrische Verteilung der Bodenreaktionskräfte zwischen Prothesenseite und kontralateraler Seite als auch durch Gelenkwinkel und Gelenkmomente vergleichbar mit denen von Nichtamputierten gekennzeichnet. Nur einer der fünf untersuchten MP (Meridium) war in der Lage, dies vollständig zu gewährleisten 10. Für die anderen MPF wurden benutzerspezifische Kompensationsstrategien beobachtet, die auf eine unzureichende Anpassungsfähigkeit zurückgeführt werden konnten und diese ausgleichen. In der Untersuchungsgruppe führte dies zu großen interindividuellen Variationen in der Haltung, die nicht mehr auftraten, wenn die Amputierten mit einem geeigneten MPF versorgt wurden (Abb. 4) 11.
Auch beim Gehen auf Rampen zeigten sich positive Effekte der MPF (s. auch 12 und 13). Es wurde zum Beispiel eine signifikante Reduktion des Kniestreckmoments sofort im ersten Schritt an einer ansteigenden Rampe ermittelt – allerdings nur für den MPF, der eine Echtzeit-Geländeanpassung ermöglicht (s. Abb. 3b). Diese Anpassung erleichtert das Überrollen des Unterschenkels über den Fuß auf einer Rampe und vereinfacht dadurch den Anstieg. Die dritte in dieser Studie identifizierte Schlüsselfunktion ist somit:
- die Echtzeitanpassung an Neigungen.
Das bedeutet für Beinamputierte, dass Prothesenfüße mit Echtzeitanpassung an die Untergrundneigung sowie einem autoadaptierbaren Dorsalflexionsstopp geringere Belastungen sowohl der betroffenen als auch der erhaltenen Seite in alltäglichen Situationen wie Gehen und Stehen verursachen. Nichtsdestotrotz weisen die Bewegungsmuster von Beinamputierten und Nichtamputierten beim Rampengehen immer noch Unterschiede auf. Ein Grund hierfür kann die fehlende zusätzliche aktive Energiezufuhr sein, die von den untersuchten MPF nicht unterstützt wird. Untersuchungen mit einem MPF, der aktiv Energie im Gangzyklus zuführt (z. B. Empower, Otto Bock) könnten hierüber Aufschluss geben.
Interessenkonflikt
Alle Autoren sind Mitarbeiter der Firma Ottobock SE & Co. KGaA. Die untersuchten mikroprozessorgesteuerten Prothesenfüße stammen von unterschiedlichen Herstellern.
Für die Autoren:
Dr. Michael Ernst, Research Engineer
Research Biomechanics, Clinical Research & Services, Ottobock SE & Co. KGaA
Hermann-Rein-Str. 2a, 37075 Göttingen
michael.ernst@ottobock.com
Begutachteter Beitrag/reviewed paper
Ernst M, Altenburg B, Bellmann M, Schmalz T. Wie mikroprozessorgesteuerte Prothesenfüße Beinamputierte beim Stehen und Gehen auf Rampen unterstützen. Orthopädie-Technik. 2018; 69 (12): 42–47
| Alltagsprothes | Meridium | Elan | Proprio | TSA | Raize | |
|---|---|---|---|---|---|---|
| Bewegungsumfang [°Plantarflexion,°Dorsalflexion] | [–, –]* | [22, 14] | [6, 3]* | [18, 10]* | [17, 17]* | [18, 10]* |
| Mechanik | - | hydraulisch | hydraulisch | Motor** | hydraulisch | hydraulisch |
| Steuerung | - | MP | MP | MP | MP | MP |
| Hersteller | Otto Bock | Otto Bock | Blatchford | Össur | Otto Bock | Fillnauer |
| Alltagsprothese | kein Gelenk, Anpassung durch Deformation der elastischen Carbonfeder |
| Meridium | Echtzeitanpassung an Neigungen in der Standphase; autoadaptiver Dorsalflexionsstopp im Stehen nach erfolgter Anpassung an die Untergrundneigung (Stehfunktion, Dorsalflexion wird blockiert); autoadaptive Absatzhöheneinstellung an unterschiedliche Schuhe und barfuß |
| Elan | Gelenk mit hydraulischer Dämpfung und vergleichsweise eingeschränktem Bewegungsumfang (s. Tab. 1); Situationserkennung von Rampen und Geschwindigkeit (Adaptation des Dorsal- und Plantarflexionswiderstandes); zusätzliche Anpassung durch Verformung der Carbonfeder |
| Proprio | inkrementelle Anpassung des Gelenkwinkels an Neigungen („AUF“ und „AB“) in der Schwungphase (Adaptation braucht mehrere Schritte); gesperrtes Gelenk im Stand (keine Rotation); zusätzliche Anpassung durch Verformung der Carbonfeder; manuelle Absatzhöheneinstellung an unterschiedliche Schuhe und barfuß |
| TSA | inkrementelle Anpassung des Gelenkwinkels an Neigungen („AUF“ und „AB“) in der Standphase; TSA gesperrtes Gelenk im Stand; Anpassung an Gehgeschwindigkeit (ermöglicht 1° zusätzliche Dorsalflexion für niedrige und 0.5° Plantarflexion für hohe Geschwindigkeiten); zusätzliche Anpassung durch Verformung der Carbonfeder; manuelle Absatzhöheneinstellung |
| Raize | inkrementelle Anpassung an Anstiege („AUF“) in der Standphase; Echtzeitanpassungen an Gefälle („AB“) in der Standphase; zusätzliche Anpassung durch Verformung der Carbonfeder; manuelle Absatzhöheneinstellung |
- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Hafner BJ, Sanders JE, Czerniecki J, Fergason J. Energy storage and return prostheses: does patient perception correlate with biomechanical analysis? Clinical Biomechanics, 2002; 17 (5): 325–344
- Hofstad CJ, van der Linde H, van Limbeek J, Postema K. Prescription of prosthetic ankle-foot mechanisms after lower limb amputation. Cochrane Database of Systematic Reviews, 2004; (1): CD003978
- Vickers DR, Palk C, McIntosh AS, Beatty KT. Elderly unilateral transtibial amputee gait on an inclined walkway: A biomechanical analysis. Gait Posture, 2008; 27 (3): 518–529
- Vrieling AH, van Keeken HG, Schoppen T, Otten E, Halbertsma JPK, Hof AL, Postema K. Uphill and downhill walking in unilateral lower limb amputees. Gait Posture, 2008; 28 (2): 235–242
- Ernst M, Altenburg B, Bellmann M, Schmalz T. Standing on slopes – how current microprocessor-controlled prosthetic feet support transtibial and transfemoral amputees in an everyday task. Journal of NeuroEngineering and Rehabilitation, 2017; 14: 117
- Ernst M, Altenburg B, Bellmann M, Schmalz T. Standing on slopes – how current microprocessor-controlled prosthetic feet support transtibial and transfemoral amputees in an everyday task. Journal of NeuroEngineering and Rehabilitation, 2017; 14: 117
- Ernst M, Altenburg B, Bellmann M, Schmalz T. Standing on slopes – how current microprocessor-controlled prosthetic feet support transtibial and transfemoral amputees in an everyday task. Journal of NeuroEngineering and Rehabilitation, 2017; 14: 117
- Fradet L, Alimusaj M, Braatz F, Wolf S. Biomechanical analysis of ramp ambulation of transtibial amputees with an adaptive ankle foot system. Gait Posture, 2010; 32 (2): 191–198
- Prochaska B, Seyr M, Fuchs F. Technologie und Funktionsweise eines neuen 4‑achsigen mikroprozessorgeregelten Prothesenfußes. Orthopädie Technik, 2017; 68 (6): 42–48
- Ernst M, Altenburg B, Bellmann M, Schmalz T. Standing on slopes – how current microprocessor-controlled prosthetic feet support transtibial and transfemoral amputees in an everyday task. Journal of NeuroEngineering and Rehabilitation, 2017; 14: 117
- Ernst M, Altenburg B, Bellmann M, Schmalz T. Standing on slopes – how current microprocessor-controlled prosthetic feet support transtibial and transfemoral amputees in an everyday task. Journal of NeuroEngineering and Rehabilitation, 2017; 14: 117
- Fradet L, Alimusaj M, Braatz F, Wolf S. Biomechanical analysis of ramp ambulation of transtibial amputees with an adaptive ankle foot system. Gait Posture, 2010; 32 (2): 191–198
- Struchkov V, Buckley JG. Biomechanics of ramp descent in unilateral transtibial amputees: Comparison of a microprocessor controlled foot with conventional ankle-foot mechanisms. Clinical Biomechanics, 2016: 32: 164–170
