Wirkung der Zehensprengung im Schuh auf die Biomechanik des menschlichen Gangs
F. Sichting, N. B. Holowka, O. B. Hansen, D. E. Lieberman
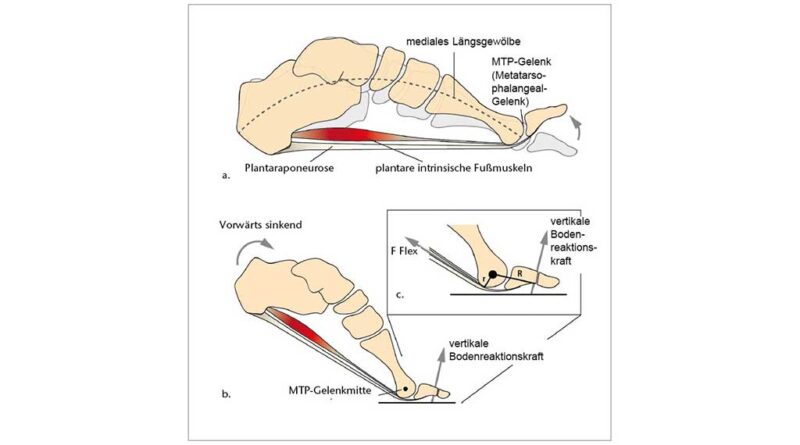
Obwohl die meisten konstruktiven Merkmale heutiger Schuhe intensiv erforscht wurden, ist die Wirkung der Zehensprengung bisher kaum untersucht. Als Zehensprengung wird der Winkel zwischen der horizontalen Bodenebene und einer Linie vom Abrollpunkt zur vorderen Spitze der Schuhsohle definiert. Diese bei fast allen Schuhen vorhandene Aufwärtswölbung der Sohle hebt die Zehenbox vom Boden ab und hält so die Zehen dauerhaft in einer dorsalflektierten Position. Es ist bekannt, dass die Zehensprengung die Abrollbewegung des Vorfußes aus der mittleren Standphase heraus erleichtert, jedoch kann die Zehensprengung auch Auswirkungen auf die physiologische Fußfunktion haben. Im Rahmen der vorgestellten Studie wurde in einem kontrollierten Experiment die Auswirkung der Zehensprengung auf die Biomechanik des Fußes untersucht. Dabei liefen die Teilnehmenden in speziell konstruierten Sandalen mit unterschiedlich stark gewölbtem Zehenbereich, wodurch Zehensprengungen von 10 bis 40 Grad simuliert wurden. Mittels Techniken der inversen Dynamik konnte festgestellt werden, dass die Zehensprengung die Gelenkmomente und die Arbeit an den Zehen in der Form beeinflusst, dass größere Grade der Zehensprengung zu einem geringeren mechanischen Arbeitsaufwand beim Gehen führen. Diese Ergebnisse bieten eine Erklärung dafür, warum die Zehensprengung seit Jahrhunderten ein weitverbreitetes Merkmal von Schuhen ist, deuten aber auch darauf hin, dass die Zehensprengung zu einer Schwächung der Fußmuskulatur und möglicherweise zu einer erhöhten Anfälligkeit für pathologische Zustände wie Plantarfasziitis beitragen kann.