Einleitung
Die Prävalenz von Stumpfproblemen bei Menschen mit Amputation der unteren Extremität ist eine bekannte Herausforderung; Schwierigkeiten im Zusammenhang mit der Schaftanpassung werden von Betroffenen häufig berichtet. Ein idealer Prothesenschaft muss Stabilität und Kontrolle, eine korrekte Lastübertragung und eine effiziente Anpassung bieten, aber auch bequem für den Benutzer sein 1 2 3 4 5.
Viele Untersuchungen über Schaftinnendruckmessungen haben sich auf das Design von Prothesenschäften konzentriert, um deren Passform und Komfort zu verbessern. Es gibt zwei Haupttypen von Schäften:
- Schäfte mit Total-Flächenkontakt (TSB) und
- Schäfte mit spezifischem Flächenkontakt (SSB).
TSB-Schäfte verteilen die Last gleichmäßig über den Stumpf und verhindern lokale Druckspitzen, während SSB-Schäfte so konzipiert sind, dass sie druckempfindliche Regionen des Stumpfes entlasten, indem sie mehr Last auf tolerante Bereiche verteilen 6 7 8.
Die derzeit auf dem neuesten Stand der Technik befindlichen Prothesenschäfte weisen feste, starre Formen auf, die keine Schwankungen des Stumpfvolumens ausgleichen können 9. Solche Schwankungen können aufgrund von Faktoren wie Ernährung, Umweltbedingungen und während der postoperativen Genesung auftreten 10 11 12. Darüber hinaus ist der Stumpf während der Verwendung des Schaftes einer unnatürlichen Umgebung ausgesetzt, z. B. einem bestimmten Druck, einer Scherbelastung und erhöhter Feuchtigkeit 13. Dazu im Einzelnen:
- Der konstante Druck an der Schnittstelle zwischen Stumpf und Schaft verringert die Durchblutung der Haut und des darunter liegenden Weichgewebes, was zu Ischämie und Gewebenekrose führen kann.
- Reibung („rutschende“ Scherung) kann zur Blasenbildung führen; tangentiale („nicht rutschende“) Scherung beeinträchtigt das darunter liegende Gewebe, wenn auch in geringerem Maße.
- Erhöhte Feuchtigkeit an der Schnittstelle zwischen Stumpf und Schaft, z. B. durch Schwitzen, erhöht die Reibung und verringert den mechanischen Widerstand der Haut 14.
Veränderungen des Stumpfvolumens verändern auch die Spannungsverteilung an der Schnittstelle zum Schaft 15. Die Nützlichkeit von Spannungs- und Temperatursensoren innerhalb des Schaftes zur Verbesserung der Passform und des Komforts des Schaftes wird sowohl in der Literatur als auch von den Betroffenen und Fachleuten (d. h. Menschen mit Amputation und deren Versorger) sehr geschätzt 16 17 18 19 20 21. Dennoch konnten in der Literatur nur sehr wenige Entwicklungen für gleichzeitige Druck- und Scherkraftmessungen ermittelt werden 22 23 24. Außerdem hängt der Wert dieser Informationen für die Beteiligten in hohem Maße von ihrer Kohärenz und Klarheit ab 25 26 27.
Dieser Artikel beschreibt ein Überwachungsgerät, das gleichzeitig Druck und Scherkräfte an der Schnittstelle zwischen Stumpf und Schaft misst, sowie einen systematischen Ansatz zur kohärenten Darstellung der auf diese Weise gewonnenen Daten. Zudem wurde eine Machbarkeitsstudie mit einem einzelnen Patienten mit Oberschenkelamputation durchgeführt, die im Abschnitt „Implementierung und Ergebnisse“ beschrieben wird.
Methodik
Im Rahmen des Rahmenprogramms für Forschung und Innovation der Europäischen Union „Horizont 2020“ wurde das „SocketSense“-Projekt entwickelt. Dabei handelt es sich um:
- ein kabelloses Überwachungssystem, das gleichzeitig den Druck innerhalb des Schaftes, die Scherkräfte und die Gangphasenerkennung misst;
- eine Toolbox für bidirektionale Konvertierungen zwischen Messungen des Drucks innerhalb des Schaftes im 3D-Raum und dessen Darstellungen im 2D-Raum.
In einer Veröffentlichung von Neumann et al. 28 wurden die Daten zum Druck im Schaft in 2D-Blöcken dargestellt, die mit den entsprechenden anatomischen Kompartimenten gepaart waren. Die hier vorgestellte Toolbox baut darauf auf, indem sie eine Methode zur Erstellung von 2D-Darstellungen der individuellen Extremitäten mit kostengünstigen und weithin zugänglichen Tools bietet. Ziel ist es, eine visuelle Darstellung der Belastungen im Schaft in einem sowohl für Ärzte als auch für Menschen mit Amputation verständlichen Format zu liefern.
Das Überwachungssystem
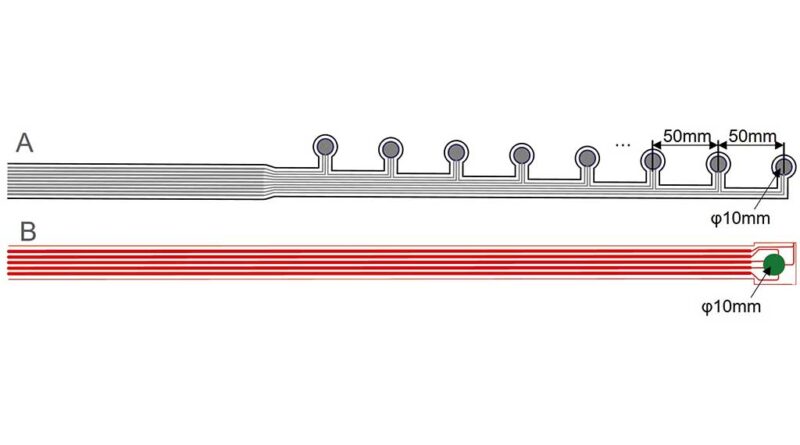
Das bis dato entwickelte Sensorsystem kann Daten von bis zu fünf Sensorstreifen aufzeichnen – in jeder Kombination von Scherkraft und Druck. Dies ermöglicht mindestens einen Sensorstreifen in jedem Quadranten (anterior, posterior, medial, lateral) und einen zusätzlichen Streifen, falls mehr Informationen gewünscht werden. Die Sensoren bestehen aus einer druckabhängigen leitfähigen Tinte (QTSSTM 29), die im Siebdruckverfahren auf ein dünnes, flexibles PET-Substrat aufgebracht wird, um den Einfluss auf die Schaftgeometrie zu minimieren. Der Drucksensorstreifen besteht aus acht Sensorelementen (sogenannten Sensels), die jeweils einen Durchmesser von 10 mm haben, in gleichmäßigen Abständen von 50 mm angeordnet und < 0,3 mm dick sind (Abb. 1a). Die Druckstreifen können auf jede gewünschte Länge zugeschnitten werden, damit sie in den Schaft passen. Jeder Scherkraftsensor besteht aus vier Flügeln, die Informationen über die Richtung der Scherkraft liefern. Auf das PET-Substrat wird ein Nitrilgummi-Puck geklebt, sodass die Gesamtdicke < 2 mm beträgt (Abb. 1b). Eine vollständige Beschreibung des Sensorsystems findet sich im Artikel von Dejke et al. 30.
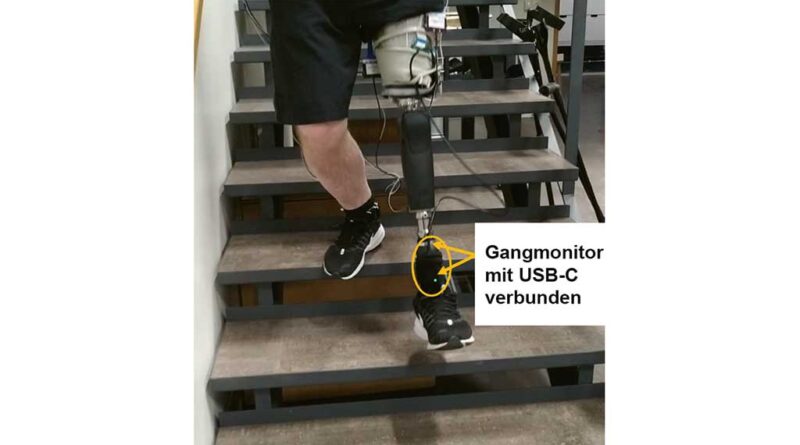
In das System ist ein Gangmonitor integriert, um eine Beziehung zwischen den Belastungsinformationen und dem Gangzyklus herzustellen. Der von Össur entwickelte IMU-basierte Gangmonitor erkennt den Fersenauftritt, die mittlere Standphase, den Zehenabstoß und die mittlere Schwungphase.
Die Sensoren und der Gangmonitor sind mit einem Hauptgerät zur Datenübernahme an der Außenseite des Schafts verbunden, das mit einer SD-Karte zur Datenspeicherung ausgestattet ist. Das gesamte System ist batteriebetrieben; es handelt sich somit um ein kabelloses Gerät (Abb. 2).
Die Sensorstreifen lassen sich nachträglich in jeden Prothesenschaft einbauen (allerdings wurden sie bisher nur mit Schäften mit Locking-Pin getestet). Der doppelseitige Kleber lässt sich leicht entfernen, ohne den Schaft dauerhaft zu verändern.
Die bidirektionale Konvertierungs-Toolbox
Die bidirektionale Konvertierungs-Toolbox besteht aus zwei Teilen:
- aus der Übersetzung zwischen physischem und digitalem Schaft oder Stumpf sowie
- aus der Konvertierung zwischen 3D-Raum und 2D-Ebene.
Konvertierung zwischen physischem und digitalem Raum
Beim 3D-Scannen wird der physische Schaft oder Stumpf in ein digitales Modell übersetzt, sodass die Spannungsverteilung auf einer digitalen Darstellung des Stumpfes abgebildet werden kann. Eine bidirektionale Übersetzung ist nur möglich, wenn der physische und der digitale Schaft bzw. Stumpf im Raum aufeinander ausgerichtet sind. Dies kann durch die Definition eines gegenseitigen Referenzkoordinatensystems in Bezug auf den globalen Koordinatenrahmen erreicht werden (Abb. 3).
Konvertierung zwischen 2D- und 3D-Raum
Die systematische Diskretisierung (Daten-Segmentierung) des Schafts bzw. Stumpfs stellt die Integrität des Modells sicher – dies erfolgt durch Nachverfolgung der anatomischen Abbildung und Ausrichtung während des Konvertierungsprozesses von 3D nach 2D. Die Diskretisierung sollte erst durchgeführt werden, nachdem der Schaft bzw. Stumpf im Raum ausgerichtet wurde:
- Die Winkeldiskretisierung (Abb. 4a) beginnt bei der BL (wie in Abb. 3 definiert), die auf 0 Grad ausgerichtet ist; die Segmentierung erfolgt in 30-Grad-Schritten, bis die BL wieder erreicht ist.
- Die longitudinale Diskretisierung (Abb. 4a) beginnt bei BL und erfolgt in distaler Richtung in 50-mm-Schritten.
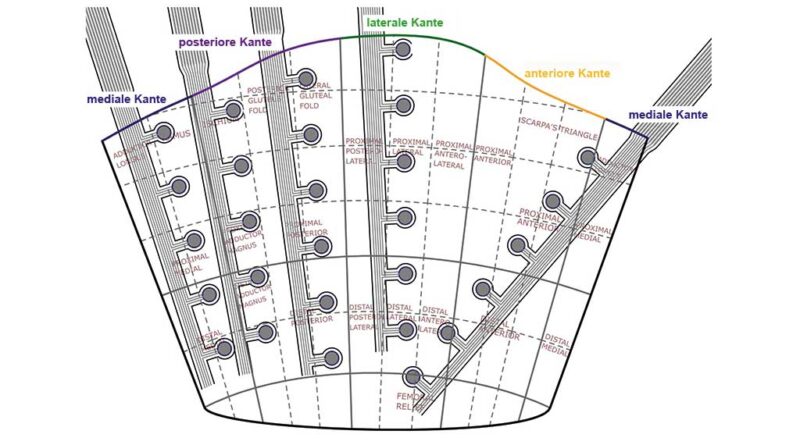
Sobald das digitale Modell segmentiert ist, kann es in eine 2D-Karte des Schafts bzw. Stumpfs zerlegt und mit den Bezeichnungen für die entsprechenden anatomischen Regionen beschriftet werden. Einzelne Sensels können auf der Grundlage der Anatomie lokalisiert werden. Um Informationen wie z. B. die Platzierung der Sensoren von der 2D-Karte auf den physischen Schaft zu übertragen, wurden ein Schaft-Koordinatensystem und eine Segmentierungsvorrichtung (Abb. 4a) erstellt.
Es wird empfohlen, die Drucksensorstreifen an problematischen Stellen zu platzieren, die für den Anwender (= Prothesenträger) spezifisch sind. Wenn es keine besonderen Regionen gibt, die von Interesse sind, wird empfohlen, in jedem Quadranten (anterior, posterior, medial, lateral) jeweils einen Streifen anzubringen, um ein vollständiges Bild der Spannungen im Schaft zu erhalten. Um die Integrität der vom Scherungssensor gelieferten Informationen zu verbessern, sollte dieser in der Nähe mindestens eines Drucksensors angebracht werden. Letztendlich liegt es jedoch im Ermessen des Untersuchers, wo er die Sensoren im Schaft des Anwenders am besten positioniert.
Visualisierung der Daten
Es wurde eine Desktop-Anwendung entwickelt, die die Visualisierung der Druckverteilung im Schaft auf personalisierten anatomischen Karten ermöglicht. Eine kubische Interpolation wird verwendet, um den Druck zwischen den einzelnen Senseln zu schätzen. Die Druckverteilungen können nach Aktivität oder als Mittelwert in Abhängigkeit vom Gangzyklus während des Gehens visualisiert werden. Die von den einzelnen Sensels aufgezeichneten Druckprofile mit Mittelwert und Standardabweichung können ebenfalls angezeigt werden.
Implementierung und Ergebnisse
Ein einzelner Proband (80 kg, männlich, Oberschenkelamputation, K‑Level 4) wurde rekrutiert, um statische und dynamische Aktivitäten mit dem Überwachungssystem durchzuführen, das in eine PETG-Nachbildung seines eigenen Direct Sockets integriert war (Abb. 5) 31.
Physikalische Vorbereitung des Schaftes
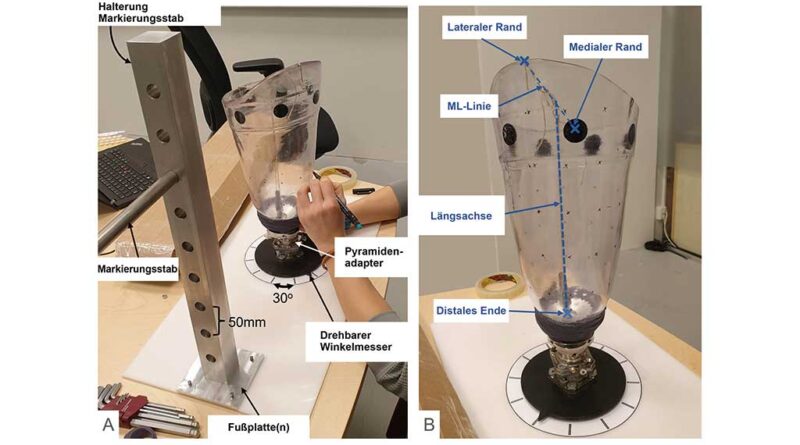
Der nachgebildete Schaft wurde mit Hilfe des Koordinatensystems und der Diskretisierungsvorrichtung ausgerichtet und diskretisiert (Abb. 4a). Der Schaft wurde mit Hilfe von Standard-Pyramidenaufsätzen an einer rotierenden Winkelmesserscheibe auf der Basis der Vorrichtung befestigt. Ein Stück Schnur wurde an den BL- und BM-Punkten (wie in Abb. 3 definiert) befestigt und ein Lot, zur Darstellung der Aufbaubezugslinie, in der Mitte der Schnur, die mit dem distalen Ende des Schaftes übereinstimmt, aufgehängt; der Winkel des Schaftes wurde mit dem Pyramidenadapter eingestellt. Zur Markierung des Schafts entlang der Längsachse wurde ein in 50-mm-Schritten festgelegter Markierungsstabhalter verwendet. Die Höhe des Halters wurde angepasst, indem Abstandshalter unter die Grundplatte gelegt wurden, um sicherzustellen, dass der Ursprung auf der BL lag. Der Schaft wurde in jedem 30-Grad-Radialschritt markiert (Abb. 4b).
Virtuelle Vorbereitung des Schafts
Es wurde ein 3D-Scan einer Positivform des Stumpfes der Testperson mit dem Schaftrand erstellt und mit dem Programm „Meshmixer“ (Autodesk Inc.) bereinigt 32. Das daraus resultierende Oberflächenmodell wurde in „Solidworks“ importiert 33, wo ein Makro erstellt wurde, um das 3D-Modell auszurichten, zu diskretisieren und in eine 2D-Karte zu verwandeln. Die daraus resultierende Karte wurde per „Inkscape“ anatomisch beschriftet 34.
Integration der Sensoren
In dieser Studie wurde die Platzierung der Sensoren auf der Grundlage von Erkenntnissen aus der Literatur auf bestimmte anatomische Stellen ausgerichtet 35 36 37 38 39. Die 2D-Karte des Stumpfes wurde mit den Renderings der Sensorstreifen überlagert, die auf dem physischen Schaft repliziert wurden. Es wurden zwei Tests mit unterschiedlichen Sensorkonfigurationen durchgeführt:
- Der erste Test wurde mit fünf Drucksensorstreifen durchgeführt, um die Bereiche mit hohem Druck und möglichst viel Oberfläche des Schafts abzudecken (Abb. 6).
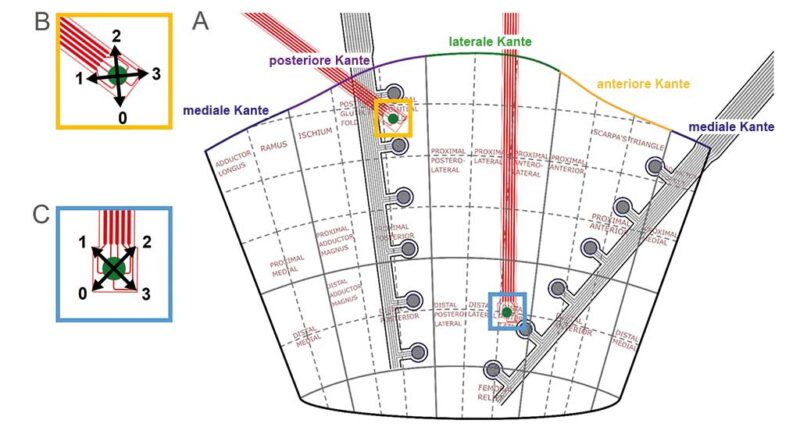
- Der zweite Test konzentrierte sich darauf, die Durchführbarkeit gleichzeitiger Druck- und Scherkraftmessungen zu bewerten, weshalb zwei Scherkraftsensoren und zwei Drucksensoren verwendet wurden.
Die Scherkraftsensoren wurden im proximalen posterioren und im distalen anterolateralen Bereich platziert. Die Drucksensorstreifen wurden so befestigt, dass sich mindestens ein Drucksensor neben jedem Scherkraftsensor befand (Abb. 7a). Die Datenmesseinheit und die Powerbank wurden außen am Schaft mit Silikonpads und mittels mit Silikon ausgekleideten Manschetten befestigt, um Stabilität und Stoßschutz zu gewährleisten (Abb. 8). Schließlich wurde der Gangmonitor angebracht.
Probandentest
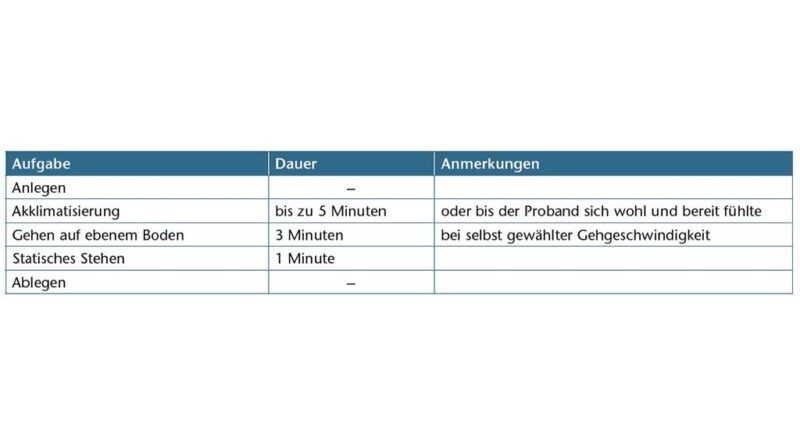
Vor den Tests wurde jeder Drucksensor kalibriert. Der Proband führte in beiden Tests die gleichen Aufgaben durch. Diese sind der Reihe nach in Tabelle 1 aufgeführt. Nach dem Anlegen des Schaftes hatte der Proband Zeit, sich an den Schaft zu gewöhnen. Er berichtete, dass sich der Schaft für die Dauer des Tests nicht unangenehm oder ungewöhnlich anfühlte.
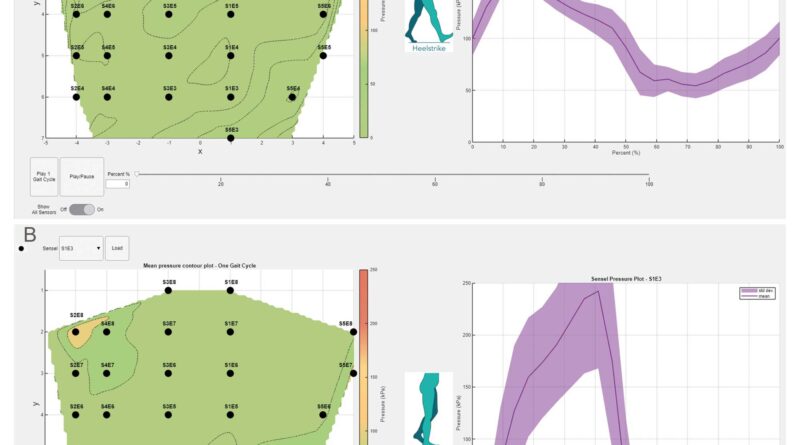
Die Desktop-Anwendung diente zur Überprüfung der aufgezeichneten Daten. Wiederholte zyklische Druckprofile zeigen sich beim Gehen auf ebenem Boden. Mittlerer Druck und Standardabweichung als Funktion des Gangzyklus werden für einzelne Sensels angezeigt (Abb. 9 rechts). Die mittleren Druckverteilungen bei Gangereignissen werden auf der 2D-Karte des Stumpfes des Probanden mit Hilfe eines Farbbalkens dargestellt (Abb. 9 links). Druckspitzen sind in der proximalen medialen Region während des Aufsetzens der Ferse und der mittleren Standphase sichtbar (Abb. 9a u b). Insgesamt ist der maximale Druck im distalen lateralen Kompartiment während der mittleren Standphase zu beobachten (Abb. 9b).
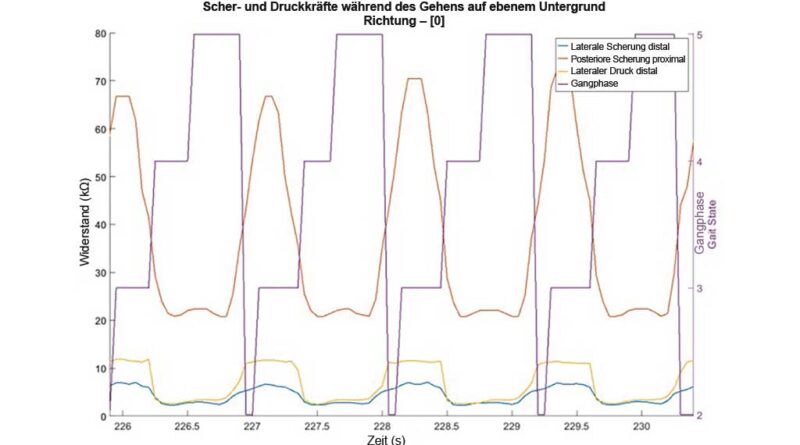
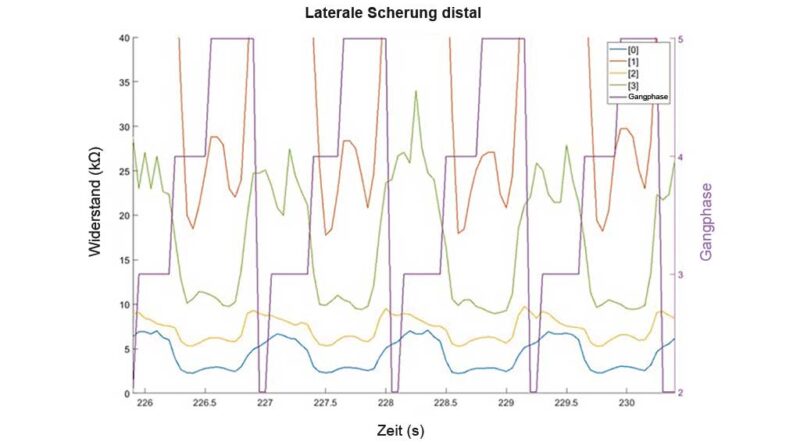
Die Scherkraftmessungen waren durch wiederholte zyklische Muster gekennzeichnet, die wie erwartet mit den Druckprofilen übereinstimmten (Abb. 10). An der proximalen posterioren Stelle sind größere Scherkraftvariationen zu erkennen als in der distalen lateralen Region; allerdings sind die Scherkraftwerte in der distalen lateralen Region größer. Abbildung 11 veranschaulicht die individuellen, gerichteten Scherkräfte im distalen lateralen Kompartiment.
Diskussion und zukünftige Arbeit
In zwei Publikationen werden die Anwendungen und Vorteile eines Überwachungssystems wie des in diesem Artikel beschriebenen diskutiert 40 41. Es kann beispielsweise als Diagnoseinstrument eingesetzt werden, das es dem Untersucher und/oder den Anwendern ermöglicht, rechtzeitig auf drohende Gewebeschäden oder andere unerwünschte Ereignisse zu reagieren, die auf eine ungewöhnlich hohe Belastung hinweisen.
Ein weiterer Use Case für ein solches System ist die postoperative Versorgung, bei der die Schwellenwerte für die Belastung im Schaft an verschiedenen anatomischen Stellen festgelegt und während der Rehabilitation schrittweise erhöht werden können.
Das Überwachungssystem
Die aus der Evaluation resultierenden Belastungsprofile und Druckwerte sind vergleichbar mit den in der Literatur genannten Werten 42 43 44. Weitere technologische Fortschritte würden den Wert des Systems erhöhen:
- Erstens würde die Kalibrierung des Scherkraftsensors es ermöglichen, die Spannung in Pascal anzuzeigen, was für die Beteiligten kohärenter wäre. Ein vorgeschlagenes Verfahren wird in 45 beschrieben.
- Zweitens könnten Modifikationen am elektronischen System vorgenommen werden, um die Möglichkeiten der QTSSTM-Tinte zu nutzen, z. B. die Verwendung der Drucksensoren zur gleichzeitigen Erkennung von Reibung.
Die Einbeziehung eines Umgebungssensors als Teil des Überwachungssystems kann Aufschluss über die Ursachen von Veränderungen der Eigenschaften des Stumpfes geben (z. B. bezüglich Volumen und Feuchtigkeit bzw. Schweiß), von denen bekannt ist, dass sie die Belastung im Schaft beeinflussen 46 47 48.
Ein entscheidender Vorteil des Geräts ist seine kabellose Funktion, die in Zukunft genutzt werden kann, um Messungen im Alltag durchzuführen. Im Rahmen des SocketSense-Projekts wird das Überwachungssystem in einer klinischen Studie getestet, um andere dynamische Aktivitäten wie das Gehen auf Rampen und Treppen einzubeziehen. Die Studie findet sowohl innerhalb als auch außerhalb der Laborumgebung statt. Für die Studie wurde nur ein Proband mit einer Oberschenkelamputation rekrutiert. Die Autoren gehen davon aus, dass das Gerät auch von Menschen mit Unterschenkelamputation ohne Veränderungen verwendet werden könnte. Weitere Forschungsarbeiten sollten jedoch durchgeführt werden, um das Systemdesign und die Sensorkonfiguration für verschiedene Amputationshöhen zu optimieren.
Die bidirektionale Konvertierungs-Toolbox
Ziel der Schaffung der rudimentären Toolbox, die aus frei verfügbaren Tools besteht, war es, ein zugängliches Verfahren bereitzustellen, das auch von Nicht-Experten für präzise Messtechniken verwendet werden kann. In dieser Studie wurden jedoch zwei spezielle Elemente verwendet – das Koordinatensystem mit der Diskretisierungsvorrichtung sowie das Programm „Solidworks“. Um diese Spezialtools überflüssig zu machen, wurde ein alternativer Ansatz für die Vorrichtung untersucht. Die vorgeschlagene Methode ist nach der Sensorintegration praktischer, allerdings nur dann geeignet, wenn ein erfahrener Untersucher in der Lage ist, wichtige anatomische Orientierungspunkte am Schaft zu identifizieren, die als Richtschnur für die Sensorplatzierung dienen können. Der vereinfachte Ansatz zur Definition der Senselpositionen gemäß dem Referenzkoordinatensystem lautet wie folgt:
- Die Winkelposition (Abb. 4a) jedes Sensorstreifens kann ermittelt werden, indem ein 360-Grad-Winkelmesser im Schaft platziert wird, wobei 0 Grad auf die BL ausgerichtet ist, und der Winkel jedes Sensorstreifens notiert wird.
- Die longitudinale Position (Abb. 4a) lässt sich ermitteln, indem man den Abstand zwischen dem distalen Ende des Schafts und der Mitte der am weitesten distal gelegenen Sensel misst. Die Höhe jedes Drucksensels vom distalen Ende des Schafts aus kann berechnet werden, da sie gleich weit voneinander entfernt sind. Die Autoren gehen davon aus, dass das gleiche Ausrichtungsverfahren für die transtibiale Kohorte angewandt werden kann, wobei jedoch andere anatomische Orientierungspunkte erforderlich wären.
Anstelle von „Solidworks“ können auch andere kostenlose Softwarepakete wie „Blender“ 49 oder „OnShape“50 verwendet werden. Alternativ dazu zeigt die erfolgreiche Implementierung des Algorithmus das Potenzial für eine Halbautomatisierung des gesamten Prozesses auf, die sich zu einer eigenständigen, frei verfügbaren Software entwickeln könnte.
Umgekehrt ist es zwar von Vorteil, über einen Scan des Stumpfes oder des Schaftes des Anwenders für die personalisierte Datenpräsentation zu verfügen, aber nicht unbedingt erforderlich. Stattdessen könnte eine virtuelle Bibliothek von Schaftmodellen und Schablonenkarten mit verschiedenen Eigenschaften des Stumpfes (z. B. Länge, Umfang, Form) erstellt werden. Dadurch erübrigen sich das 3D-Scannen und die anschließende Bearbeitung: Das Modell, das den Schaft des Anwenders am besten repräsentiert, wird für die Datenvisualisierung ausgewählt.
Darstellung der Daten
Die Darstellung von Daten in 3D ist rechenintensiver als in 2D und wohl auch schwieriger zu verstehen. Eine 2D-Darstellung der anatomischen Druckverhältnisse im Schaft mit einem Farbbalken liefert die Daten in einem schnell verfügbaren, informativen und leicht verständlichen Format. Es ist zum Beispiel sofort ersichtlich, ob es Regionen mit hoher Belastung gibt und wo sich diese Stellen am Stumpf befinden.
Das oben erwähnte Softwarepaket könnte mit einer Benutzeroberfläche (UI) zur Datenvisualisierung kombiniert werden, wie sie in der Desktop-Anwendung vorgestellt wird. Die UI muss noch weiterentwickelt werden, um Scherkraftinformationen einzubeziehen. Danach könnten auf der Grundlage der vom bestehenden Überwachungssystem gesammelten Daten praktisch unbegrenzte Funktionen integriert werden. Einige Beispiele in diesem Zusammenhang:
- Visualisierung der Druckverteilung auf 3D-Renderings des Schafts,
- Aktivitätsüberwachung in Form von Zählung der täglichen Schritte,
- indizierte Veränderungen des Volumens des Stumpfs sowie
- langfristige Belastungsschwankungen.
Fazit
In diesem Artikel wurden die Grundlagen eines kostengünstigen Stumpfüberwachungssystems vorgestellt, das leicht um weitere Funktionen erweitert werden kann. Die Toolbox wurde entwickelt, um eine kohärente Datenvisualisierung aus dem Überwachungssystem für einfache Zugänglichkeit und Einfachheit zu ermöglichen, sodass sie ohne den Einsatz von Spezialwerkzeugen verwendet werden kann.
Aus Sicht der Autoren gibt es aber einige Verbesserungen und Bewertungen, die durchgeführt werden sollten, bevor das System in den täglichen Gebrauch und somit in den Markt überführt werden kann. Primär sollten Haltbarkeitstests wie z. B. Haftung der Sensoren am Sockel sowie der Sensoren selbst durchgeführt werden. Darüber hinaus müssen die Änderungen der Sensoreigenschaften über den Langzeitgebrauch und damit der Kalibrieranforderungen bewertet werden sowie die Testung des Systems mit anderen Anschlüssen, da bei diesem Projekt nur Pin-Anschlüsse getestet wurden. Des Weiteren planen die Autoren an einer Miniaturisierung der Hardware, insbesondere der Datenerfassungseinheiten, um die Handhabung in der Praxis zu verbessern.
Finanzierung
Diese Untersuchung wurde im Rahmen des Projekts „SocketSense“ durchgeführt, das vom Forschungs- und Innovationsprogramm „Horizont 2020“ der Europäischen Union unter der Fördervereinbarung Nr. 825429 finanziert wurde.
Für die Autoren:
Siu-Teing Ko, M. Eng.
Research Engineer
Center for New Technologies
Össur hf.
Grjótháls 5
IS-110 Reykjavík
Island
stko@ossur.com
Begutachteter Beitrag/reviewed paper
Ko S‑T, Charnley J, Dejke V. System zur Überwachung der Scherkräfte und des Drucks auf den Stumpf der unteren Extremität mit Toolbox zur kohärenten Visualisierung der Daten. Orthopädie Technik, 2022; 73 (8): 32–39


- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Paternò L et al. Residual limb volume fluctuations in transfemoral amputees. Science Report, 2021; 11: 1–11
- Ibarra Aguila S et al. Interface Pressure System to Compare the Functional Performance of Prosthetic Sockets during the Gait in People with Trans-Tibial Amputation. Sensors, 2020; 20 (24): S.7043
- Larsen B et al. Performance of a sensor to monitor socket fit: Comparison with practitioner clinical assessment. Journal of Prosthetics and Orthotics, 2021; 33:. 3–10
- Turner S, McGregor A. Perceived effect of socket fit on major lower limb prosthetic rehabilitation: A clinician and amputee perspective. Archives of Rehabilitation Research and Clinical Translation, 202; 2 (3): S100059
- Turner S et al. Issues faced by people with amputation(s) during lower limb prosthetic rehabilitation: A thematic analysis. Prosthetics and Orthotics International, 2021; 46, Nr. 1, pp. 61–67, 2021
- Paterno L. Sockets for Limb Prostheses: A Review of Existing Technologies and Open Challenges,“ IEEE Transactions on Biomedical Engineering, 2018; 65 (9): 1996–2010
- Stevens P et al. Transtibial socket design, interface, and suspension: A clinical practice guideline. Journal of Prosthetics and Orthotics, 2019; 31: 172–178
- Mueller M. Transfemoral Amputation: Prosthetic Management. In: Smith, Michael, Bowker; Atlas of Amputations and Limb Deficiencies. 4th ed. American Academy of Orthopaedic Surgeons: Rosemont, 2016: 537–554
- Turner S, McGregor A. Perceived effect of socket fit on major lower limb prosthetic rehabilitation: A clinician and amputee perspective. Archives of Rehabilitation Research and Clinical Translation, 202; 2 (3): S100059
- Paternò L et al. Residual limb volume fluctuations in transfemoral amputees. Science Report, 2021; 11: 1–11
- Turner S et al. Issues faced by people with amputation(s) during lower limb prosthetic rehabilitation: A thematic analysis. Prosthetics and Orthotics International, 2021; 46, Nr. 1, pp. 61–67, 2021
- Sander J, Fatone S. Residual Limb Volume Change: Systematic Review Measurement and Management. Journal of Rehabilitation Research and Development, 2011; 48 (8): 949–986
- Meulenbelt H et al. Skin problems in lower limb amputees: An overview by case reports. Journal of the European Academy of Dermatology and Venereology, 2007; 21 (2): 147–155
- SANDERS, Joan. Stump-socket interface conditions. In: Pressure ulcer research. Springer, Berlin, Heidelberg, 2005. S. 129–147
- Paterno L. Sockets for Limb Prostheses: A Review of Existing Technologies and Open Challenges,“ IEEE Transactions on Biomedical Engineering, 2018; 65 (9): 1996–2010
- Ibarra Aguila S et al. Interface Pressure System to Compare the Functional Performance of Prosthetic Sockets during the Gait in People with Trans-Tibial Amputation. Sensors, 2020; 20 (24): S.7043
- Larsen B et al. Performance of a sensor to monitor socket fit: Comparison with practitioner clinical assessment. Journal of Prosthetics and Orthotics, 2021; 33:. 3–10
- Kwak JW et al. Wireless sensors for continuous, multimodal measurements at the skin interface with lower limb prostheses. Science Translational Medicine, 2020; 12 (574): S. eabc4327
- Hafner B, Sanders J. Considerations for development of sensing and monitoring tools to facilitate treatment and care of persons with lower limb loss. Journal of Rehabilitation Research and Development, 2014; 51 (1): 1
- Tran L et al. Stakeholder perspectives for possible residual limb monitoring system for persons with lower-limb amputation. Disability and Rehabilitation, 2020; 42: 63–70
- Safari R. Lower limb prosthetic interfaces: Clinical and technological advancement and potential future direction. Prosthetics and Orthotics International, 2020; 44: 384–401
- Laszczak P et al. A pressure and shear sensor system for stress measurement at lower limb residuum/socket interface. Medical Engineering and Physics, Bd. 38, pp. 695–700, 2016
- Appoldt F et al. Tangential pressure measurements in above-knee suction sockets. Bulletin of Prosthetics Research, 1970; 10 (13): 70–86
- Tang J et al. A combined kinematic and kinetic analysis at the residuum/socket interface of a knee-disarticulation amputee. Medical Engineering and Physics, 2017; 49: 131–139
- Ko S et al. A Scoping Review of Pressure Measurements in Prosthetic Sockets of Transfemoral Amputees during Ambulation: Key Considerations for Sensor Design. Sensors, 2021; 21 (15): 5016
- Neumann E et al. Concepts of pressure in an ischial containment socket: Measurement. Journal of Prosthetics and Orthotics, 2005; 17 (1): 2–11
- Kahle J, Highsmith M. Transfemoral interfaces with vacuum assisted suspension comparison of gait, balance, and subjective analysis: ischial containment versus brimless. Gait Posture, 2014; 40 (2): 315–320
- Neumann E et al. Concepts of pressure in an ischial containment socket: Measurement. Journal of Prosthetics and Orthotics, 2005; 17 (1): 2–11
- Quantum Technology Supersensors Ltd. Quantum Technology SupersensorsTM. https://www.quantumtechnologysupersensors.com/ (Zugriff am 29.05.2022)
- Dejke V et al. Development of Prototype Low-Cost QTSS™ Wearable Flexible More Enviro-Friendly Pressure, Shear, and Friction Sensors for Dynamic Prosthetic Fit Monitoring. Sensors, 2021; 21 (11): 3764
- Össur hf. Direct Socket TF https://www.ossur.com/en-us/prosthetics/sockets/direct-socket-tf. (Zugriff am 29.05.2022)
- Autodesk Inc. Autodesk Meshmixer. https://www.meshmixer.com/ (Zugriff am 29.05.2022)
- Dassault Systèmes SolidWorks Corporation. Solidworkshttps://www.solidworks.com/ (Zugriff am 29.05.2022)
- Inkscape Community. Inkscapehttps://inkscape.org/ (Zugriff am 29.05.2022)
- Laszczak P et al. A pressure and shear sensor system for stress measurement at lower limb residuum/socket interface. Medical Engineering and Physics, Bd. 38, pp. 695–700, 2016
- Appoldt F et al. Tangential pressure measurements in above-knee suction sockets. Bulletin of Prosthetics Research, 1970; 10 (13): 70–86
- Tang J et al. A combined kinematic and kinetic analysis at the residuum/socket interface of a knee-disarticulation amputee. Medical Engineering and Physics, 2017; 49: 131–139
- Neumann E et al. Concepts of pressure in an ischial containment socket: Measurement. Journal of Prosthetics and Orthotics, 2005; 17 (1): 2–11
- Thuc T et al. Analyzing the Shear Stress on the Contacting Interface During Ambulation with Transfemoral Prosthesis Socket. 11th Asian-Pacific Conference on Medical and Biological Engineering. Proceedings of the Online Conference APCMBE, May 25–27, 2020
- Hafner B, Sanders J. Considerations for development of sensing and monitoring tools to facilitate treatment and care of persons with lower limb loss. Journal of Rehabilitation Research and Development, 2014; 51 (1): 1
- Tran L et al. Stakeholder perspectives for possible residual limb monitoring system for persons with lower-limb amputation. Disability and Rehabilitation, 2020; 42: 63–70
- Laszczak P et al. A pressure and shear sensor system for stress measurement at lower limb residuum/socket interface. Medical Engineering and Physics, Bd. 38, pp. 695–700, 2016
- Tang J et al. A combined kinematic and kinetic analysis at the residuum/socket interface of a knee-disarticulation amputee. Medical Engineering and Physics, 2017; 49: 131–139
- Neumann E et al. Concepts of pressure in an ischial containment socket: Measurement. Journal of Prosthetics and Orthotics, 2005; 17 (1): 2–11
- Dejke V et al. Development of Prototype Low-Cost QTSS™ Wearable Flexible More Enviro-Friendly Pressure, Shear, and Friction Sensors for Dynamic Prosthetic Fit Monitoring. Sensors, 2021; 21 (11): 3764
- Paterno L. Sockets for Limb Prostheses: A Review of Existing Technologies and Open Challenges,“ IEEE Transactions on Biomedical Engineering, 2018; 65 (9): 1996–2010
- SANDERS, Joan. Stump-socket interface conditions. In: Pressure ulcer research. Springer, Berlin, Heidelberg, 2005. S. 129–147.
- Paternò L et al. A personalised prosthetic liner with embedded sensor technology: a case study. BioMedical Engineering OnLine, 2020; 19 (71): S. 1–20
- Blender Foundation. Blender. https://www.blender.org/ (Zugriff am 29.05.2021)
- Onshape Inc. Onshape. https://www.onshape.com/ (Zugriff am 29.05.2022)
