Einleitung
Die Wahrnehmung des Körpers in all seinen Teilen ist das Korrelat elektrischer Impulsaktivitäten von Neuronen der postzentralen Rindenfelder beider Hirnhälften. Nervenimpulse taktiler, nozizeptiver und propriozeptiver Sinnesrezeptoren werden über Nervenbahnen durch das Rückenmark, den Hirnstamm und den Thalamus an Zielneuronen der jeweils gegenseitigen postzentralen Hirnrinde geleitet. Diese sensiblen Nervenbahnen treffen an ihren Zielneuronen in “somatotoper” Ordnung ein. Das bedeutet, dass jede Körperhälfte vom Scheitel bis zur Sohle im Gehirn in einem Kontinuum von Zielneuronen als sogenannter Homunkulus abgebildet wird 1. Sinnesrezeptoren, die auf einer Körperhälfte an benachbarten Orten liegen, erregen daher auch Neuronen benachbarter Stellen der somatosensorischen Rinde der gegenseitigen Hirnhälfte.
Die Amputation einer Hand oder eines Armes unterbricht Nervenbahnen. Somit werden keine Reizimpulse mehr an die entsprechenden Zielneuronen geleitet, die auf der somatosensorischen Hirnrinde die verlorene Hand oder den verlorenen Arm repräsentiert hatten. Die nicht mehr betätigten synaptischen Verbindungen dieser Nervenbahnen mit ihren Zielneuronen zerfallen. In das nach der Amputation brachliegende Feld der Zielneuronen wachsen intrakortikal axonale Fasern aus benachbarten Feldern der entsprechenden somatosensorischen Hirnrinde ein und knüpfen anstelle der zerfallenen Verbindungen mit den stummen Zielneuronen neue synaptische Kontakte 2 3. Infolge dieser neuronalen Reorganisation werden umschriebene Hautzonen der Körperhälfte, an der die Amputation erfolgte, als “rezeptive Felder” ausgewiesen, deren taktile Reizung mit Hilfe eines Pinsels oder einer Zahnbürste Phantomempfindungen für einzelne Teile der amputierten oberen Extremität hervorrufen kann. Die Grenzen solcher rezeptiver Hautfelder lassen sich mit Hilfe eines Schminkstiftes anzeichnen. In digitalen Fotografien können diese rezeptiven Felder für die Dokumentation mittels Paint-Funktion eines PCs farblich hervorgehoben werden.
Ramachandran und Hirstein 4 haben bereits im Jahr 1998 rezeptive Hautfelder mehrerer hand- und armamputierter Personen beschrieben, deren taktile Reizung mit Hilfe von Wattestäbchen Phantomempfindungen bestimmter Teile einer verlorenen Hand oder eines Armes auslöste. Solche rezeptiven Hautfelder fanden sich an Oberarm, Schulter und Gesicht amputierter Probanden.
Auch bei Personen mit Amputationen einer oder beider unterer Extremitäten wurden rezeptive Hautfelder zur taktilen Anregung entsprechender Phantomempfindungen nachgewiesen. Sie häufen sich in Abhängigkeit von der Amputationshöhe an Oberschenkel, Hüfte, Oberkörper und Armen 5. Serien elektrischer Spannungsimpulse, bipolar über je zwei kleinflächige TENS-Elektroden durch eines der rezeptiven Hautfelder geleitet, können gleichfalls eine bestimmte Phantomempfindung für einen Teil des amputierten Fußes auslösen. Unter solchen rezeptiven Feldern findet sich beispielsweise eines für die Phantomempfindung der Ferse, ein anderes für die Phantomempfindung des Ballens oder der Zehenreihe. Je einer von zwei Stromkreisen kann ausgehend von einem tragbaren Impulsgenerator durch eines dieser beiden rezeptiven Felder geleitet und mit Hilfe eines lastabhängigen Drucksensors betätigt werden. Ein Drucksensor wird im Fersenteil einer Schuhsohle, der andere in deren Ballenteil eingearbeitet. Wenn der Anwender mit seinem Prothesenfuß auf die so präparierte Schuhsohle tritt, werden im Takt seiner Schritte alternierend Phantomempfindungen für Ferse und Ballen seines verlorenen Fußes ausgelöst. Obgleich der Anwender eine herkömmliche Beinprothese trägt, kann ein schrittgetriggerter elektrischer Phantomstimulator – fixiert am Prothesenrohr – die Wahrnehmung vermitteln, mit zwei intakten Beinen zu gehen 6 7. Diese Erfahrungen legen nahe, die elektrische Phantomstimulation auch für Patienten mit einer Amputation der oberen Extremität zu nutzen. Die vorliegende Pilotstudie zeigt in diesem Zusammenhang eine erste Möglichkeit, aber auch eine Reihe zu überwindender Schwierigkeiten auf.
Methode
In der vorliegenden Studie wird eine Möglichkeit getestet, wie eine taktile Rückmeldung einer Armprothese mit Hilfe einer elektrisch angeregten Phantomempfindung für die Handinnenfläche dargestellt werden kann. Dazu werden zunächst geeignete Felder identifiziert und getestet, ob deren Zuordnung über eine längere Zeit identisch bleibt oder sich noch verändert, da dies wichtig für eine entsprechende dauerhafte Versorgung ist. Sodann werden als geeignet ermittelte Felder zeitgleich mit dem Einsatz der Prothese mittels TENS-Elektroden stimuliert, um zu ermitteln, ob sich dabei eine Kongruenz zwischen der Wahrnehmung bzw. Lokalisierung der Prothese und der Phantomhand ergibt, was die Voraussetzung für eine möglichst realistische taktile Rückmeldung wäre.
Anamnese
Die 35-jährige Probandin war 2013 mit ihrem Pkw gegen einen Baum geschleudert. Dabei wurde ihr linker Arm derart verletzt, dass er kurz unterhalb des Schultergelenks amputiert werden musste. In der ersten Zeit nach der Amputation empfand die Patientin starke Wundschmerzen an ihrem Amputationsstumpf. Bald stellte sich auch ein anhaltender Phantomschmerz ein. Phantomhand und Phantomarm fühlten sich krampfartig verspannt an; die Phantomfinger verharrten in schmerzhafter Flexion. Diese Phantomschmerzen versuchte die Patientin mit Hilfe oraler Präparate zu lindern.
Derzeitige Versorgung
Die Nutzung einer myoelektrischen Armprothese fiel der Patientin schwer, denn der verbliebene Armstumpf war zu kurz, um als wirksamer Hebel für die Prothese dienen zu können. Um deren Gewicht zu vermindern, wurden das technische Armgelenk und der Unterarmhebel ausgebaut. Infolgedessen wurde die Prothesenhand am Ende des Oberarmhebels montiert. Die gesamte Armprothese ist daher um eine Unterarmlänge kürzer als der intakte rechte Arm.
Mit Hilfe selbstklebender Oberflächenelektroden konnten Aktionsströme von Muskeln des Amputationsstumpfes abgeleitet werden, die nach entsprechender Verstärkung als integrierte Hüllkurvensignale die Bewegungen der Prothesenhand steuerten. Die Prothese ist derart programmiert, dass sie das Öffnen und Schließen der Hand ermöglicht. Die Patientin musste zu diesem Zweck lernen, entsprechende Muskeln ihres Amputationsstumpfes und der Schulter derart anzuspannen, dass die Prothesenhand geöffnet oder geschlossen wurde. Um bei diesen Übungen keine harten Gegenstände wie Gläser, Tassen oder Becher zu beschädigen, trainierte sie die Greifbewegungen an einem zu einem Ball geformten Stoffsack (Abb. 1). Es war der Trägerin allerdings nicht möglich, ihre Prothese selbstständig anzulegen, daher verwendete sie diese in ihrem Alltag nur selten.
Ergebnisse
Zunächst mussten mit Hilfe taktiler Reize rezeptive Felder ermittelt werden, die später für eine elektrische Phantomstimulation einzelner Teile der verlorenen Hand genutzt werden sollten. Dafür wurden drei Termine vorgesehen.
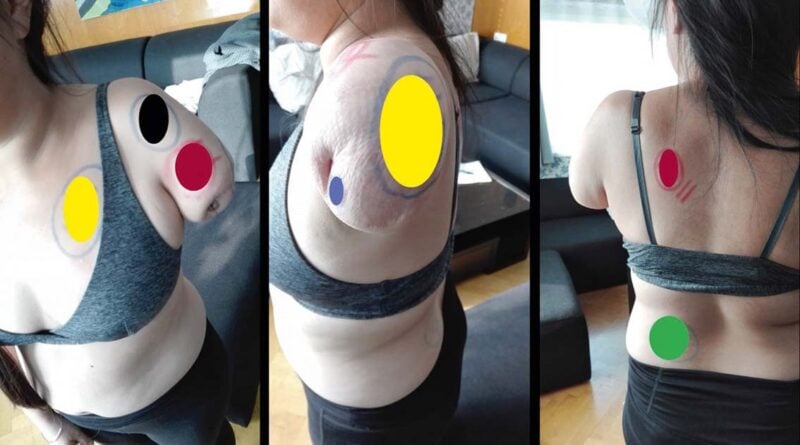
Ein erster Termin wurde im Oktober 2018 vereinbart. Die Amputation lag zu diesem Zeitpunkt bereits fünf Jahre zurück. Hautpartien des linksseitigen Oberkörpers, der Schulter und des Amputationsstumpfes wurden abwechselnd mit Hilfe eines handbreiten Malerpinsels und einer Zahnbürste überstrichen. Die Grenzen der so bestimmbaren rezeptiven Felder wurden mit Hilfe eines Schminkstiftes angezeichnet. Die Paint-Funktion eines PCs erlaubte es dann, diese Felder in digitalen Fotografien farblich hervorzuheben (Abb. 2). Folgende Felder konnten ermittelt werden:
Ventral: Wie Abbildung 2 zeigt, fand sich ventral oberhalb der linken Brust ein rezeptives Feld (gelb markiert), dessen taktile Reizung ein Phantomempfinden der linken Handinnenfläche mit Daumenballen und den Grundgelenken von Daumen, Zeige- und Mittelfinger hervorrief. Ein rezeptives Feld für den linken Daumenballen (Abb. 2a, schwarze Kreisfläche) lag in Höhe des Schultergelenkes und ein rezeptives Feld für den Handrücken einschließlich des zweiten bis fünften Handknöchels darunter an der Vorderseite des Amputationsstumpfes (Abb. 2a, rote Kreisfläche).
Lateral: Ein zweites rezeptives Feld für die Handinnenfläche wurde an der Seite des Amputationsstumpfes bestimmt (Abb. 2b, große gelbe Ellipse). Die taktile Reizung eines sehr kleinen Feldes am seitlichen Amputationsstumpf (Abb. 2b, blauer Punkt) beschrieb die Probandin als “pulsierendes, einschießendes Gefühl”, das die gesamte Phantomhand durchziehe.
Dorsal: Auch in Höhe des linken Schulterblattes lag ein rezeptives Feld, dessen taktile Reizung ein Phantomempfinden des Handrückens sowie des zweiten bis fünften Fingerknöchels auslöste (Abb. 2c, dunkelroter Kreis). Dorsal am Rumpf fand sich ein weiteres rezeptives Feld (Abb. 2c, grüner Kreis), dessen taktile Reizung eine Phantomempfindung für den Abschnitt zwischen Ellenbogen und Amputationsstumpf auslöste.
Eine zweite Untersuchung der Probandin rund zwei Monate später im Dezember 2018 ergab, dass die Felder auf der ventralen und auf der lateralen Seite im Vergleich zur ersten Untersuchung unverändert geblieben waren. Auch das kleine laterale Feld, dessen taktile Reizung ein “pulsierendes, einschießendes Gefühl” einer Phantomhand hervorrief, wurde erneut am lateralen Stumpf aufgefunden. Nur das dorsale rezeptive Feld für den Handrücken, das bei der ersten Untersuchung am unteren Ende des linken Schulterblattes gefunden wurde, hatte sich verändert und war nun zu einem weiteren rezeptiven Feld für die Handinnenfläche geworden. Offensichtlich war im Ablauf von zwei Monaten die neurobiologische Reorganisation im somatosensorischen Kortex der Probandin derart fortgeschritten, dass die am rezeptiven Feld des linken Schulterblattes ausgelösten taktilen Reize nun in neuen interkortikalen Verbindungen mit somatosensorischen Zielneuronen endeten, welche die Handinnenfläche repräsentierten.
enfläche repräsentierten. Nachdem die rezeptiven Felder beim zweiten Termin anhand taktiler Reize mittels Pinsel und Zahnbürste neu bestimmt worden waren, wurden diese Felder zusätzlich mit Hilfe eines Phantomstimulators elektrisch gereizt, um festzustellen, ob auch diese Reizung die entsprechenden Phantomempfindungen auszulösen vermochte. Das Gerät lieferte elektrische Impulsserien, deren Frequenz auf 70 Hz eingestellt war. Die Impulsdauer betrug 260 Mikrosekunden. Die Höhe der Impulse konnte mit Hilfe eines Potentiometers zwischen 7 und 10 Volt derart reguliert werden, dass die Impulsserie eine Phantomempfindung auslöste. Mit Hilfe einer Funktionstaste konnte der Untersucher (F. K.) das Gerät für eine beliebig lange Zeit einschalten, um die Rückmeldung der Prothesenhand (die mit entsprechenden Sensoren ja noch nicht ausgestattet ist) zu imitieren.
Im Folgenden wurden die großflächigen ventralen rezeptiven Felder für die Innen- und Außenfläche der Hand für eine elektrische Reizung ausgewählt:
- Zunächst wurden zwei TENS-Elektroden an den Rand des rezeptiven Felds am ventralen Rumpf geklebt, dessen taktile Reizung eine Phantomempfindung für die linke Handinnenfläche ausgelöst hatte (Abb. 3a, gelbes Feld). Auch unter elektrischer Stimulation empfand die Probandin eine linke Handinnenfläche mit Daumenballen und den Grundgelenken von Daumen, Zeige- und Mittelfinger. Die taktil und elektrisch ausgelösten Phantomempfindungen deckten sich vollständig.
- Bei der folgenden elektrischen Stimulation wurde ein Paar von TENS-Elektroden am Rand des rezeptiven Feldes für den Handrücken angelegt, das bereits bei der ersten Untersuchung am ventralen unteren Ende des Amputationsstumpfes bestimmt worden war (Abb. 3b, rotes Feld). Die taktile Reizung mit Hilfe eines Pinsels und einer Zahnbürste hatte eine Phantomempfindung des Handrückens und auch des zweiten bis fünften Handknöchels ausgelöst. Demgegenüber erzeugte die elektrische Stimulation dieses Feldes das Gefühl eines krampfartigen Zusammenziehens der Phantomhand.
- Die Elektrostimulation des großen rezeptiven Feldes für die Handinnenfläche, das seitlich am Stumpf lag und mit einer gelben Ellipse gekennzeichnet worden war (Abb. 3b), löste die gleiche Phantomempfindung für die Handinnenfläche aus wie die taktile Reizung. Dieses elektrisch stimulierte Gefühl war für die Probandin sehr angenehm, da es die Phantomhand aus der krampfhaften Stellung befreite, in die die vorausgegangene Elektrostimulation des Handrückenfeldes sie gebracht hatte. Die elektrische Stimulation der beiden dorsalen rezeptiven Felder wurde erst am dritten Termin im Januar 2019 vorgenommen.
An diesem dritten Termin wurde die elektrische Phantomstimulation in Kombination mit der myoelektrischen Armprothese der Probandin angewendet. Eine erneute Bestimmung rezeptiver Felder zeigte, dass sich diese zwar wiederum an denselben Stellen befanden, an denen sie bereits beim ersten und beim zweiten Termin ermittelt worden waren. Das bei der ersten Untersuchung am linken unteren Rücken entdeckte und als grüne Rundfläche gekennzeichnete rezeptive Feld hatte sich jedoch im Lauf der Monate gewandelt: Beim ersten und zweiten Termin hatte dessen taktile Reizung noch eine Phantomempfindung für den Armabschnitt zwischen Amputationsstumpf und Ellenbogen ausgelöst. Im Januar 2019 aber war auch diese Hautzone zu einem rezeptiven Feld für die Handinnenfläche geworden.
Beim Anlegen der Armprothesewurden alle rezeptiven Felder im Bereich des Amputationsstumpfes abgedeckt. Zudem mussten am Amputationsstumpf nun auch die Oberflächenelektroden für die myoelektrische Steuerung angeklebt werden. Daher lagen jetzt nur noch das ventrale Feld für die Handinnenfläche und die beiden dorsalen rezeptiven Felder frei (Abb. 2c). Beide Hautzonen – die über dem linken Schulterblatt (dunkelrot) und die an der linken unteren Rückenseite (grün) – waren inzwischen zu rezeptiven Feldern für die Phantomstimulation der Handinnenfläche geworden.
In einem ersten Versuch wurde ein Paar von TENS-Elektroden am ventralen rezeptiven Feld für die Handinnenfläche angelegt, das sich ventral unterhalb des linken Schlüsselbeines befand (Abb. 2a, gelbes Feld). Solange die Probandin keine Greifbewegung ihrer Prothese auszulösen versuchte, rief die elektrische Reizung dieses Hautfeldes erwartungsgemäß eine Phantomempfindung für die Handinnenfläche aus. Dann aber betätigte der Untersucher die Funktionstaste des Phantomstimulators, sooft die Probandin eine Greifbewegung ihrer myoelektrischen Handprothese auszulösen versuchte. Dabei ergab sich jedoch das Problem, dass die Spannungsimpulse des Stimulators sich auf die nahegelegenen Ableitelektroden der Myoprothese übertrugen, sodass deren Funktion gestört wurde:
Die Probandin vermochte die Prothesenhand weder zu öffnen noch zu schließen. Dagegen erlaubte die elektrische Reizung des rezeptiven Feldes am linken Schulterblatt und des tiefer liegenden dorsalen Feldes das Öffnen und Schließen der Prothesenhand, da diese rezeptiven Felder weiter von den Ableitelektroden für die myoelektrischen Potenziale entfernt lagen (Abb. 4a u. b).
Die elektrische Stimulation des rezeptiven Feldes am linken Schulterblatt (Abb. 4a) der Probandin erfolgte zunächst, ohne dass sie eine Greifbewegung ihrer Prothese auszulösen versuchte. Die dabei hervorgerufene Phantomempfindung für die Handinnenfläche deckte sich aber nicht mit der Prothesenhand: Für die Probandin fühlte es sich an, als befinde sich die Prothesenhand irgendwo im körpernahen linksseitigen Raum, aber nicht an der Stelle der Phantomhand. Als die Probandin schließlich eine Greifbewegung nach einem Stoffballen ausführte und gleichzeitig die Aktivierungstaste des Stimulators betätigt wurde, blieb die Phantomhand zwar weiterhin bestehen. Die Probandin konnte sie jedoch nicht als die Hand beschreiben, die das Objekt gegriffen hatte. Bei dieser und einigen weiteren Greifbewegungen blickte die Probandin von der Prothese weg und konzentrierte sich auf ihre Phantomhand. Als sie dann aber während der Elektrostimulation auf die Prothesenhand sah, beschrieb sie ihre Empfindung als “echter” und “übereinstimmender”.
Auch bei einer elektrischen Stimulation ihres rezeptiven Feldes an der linken unteren Rückenseite (Abb. 4b) empfand sie deutlich die Innenfläche einer Phantomhand. Wenn zeitgleich mit einer Greifbewegung der Prothese die Aktivierungstaste des Stimulators gedrückt wurde, löste dies wiederum die Phantomempfindung einer Handinnenfläche aus. Wenn die Probandin dabei auf ihre Prothesenhand blickte, lag der Ort der Phantomempfindung zwar sehr nahe an der Prothesenhand, die Hand wurde aber als etwas neben der Prothesenhand befindlich wahrgenommen. Es bestand also auch hier keine vollständige Kongruenz von Phantom- und Prothesenhand. Dennoch scheint der bloße Anblick der Prothese zu bewirken, dass die somatosensorische Wahrnehmung der Phantomhand mit der optischen Wahrnehmung der Prothesenhand annähernd zur Deckung gebracht wird.
Diskussion
Eine myoelektrische Armprothese kann zwar in Grenzen die motorischen Funktionen einer verlorenen Hand oder eines Armes wiederherstellen. Sie vermittelt aber keine taktile Rückmeldung eines Berührungs- oder Griffkontaktes. In einer früheren Studie aus dem Hause Ottobock wurde versucht. dieses gravierende Problem mittels Vibrationsreizen zu lösen, die von Sensoren der Prothesenhand zeitgleich mit dem Erfassen eines Gegenstandes an Stellen oberhalb des Amputationsstumpfes ausgelöst werden 8.
In der vorliegenden Studie wurde eine taktile Rückmeldung mit Hilfe einer elektrisch angeregten Phantomempfindung für die Handinnenfläche dargestellt. Die so erzeugte Phantomhand aber wurde vom Gehirn der Probandin an irgendeiner Stelle ihres körpernahen linksseitigen Raumes verortet und nicht an ihrer Prothesenhand. Erst als sie ihre myoelektrisch gesteuerten Greifbewegungen der Prothesenhand mit ihren Augen verfolgte, empfand sie, dass sich die Phantomhand annähernd mit der Prothesenhand deckte.
Diese Beobachtung verweist auf einen erstmals im Jahr 1998 von Botvinick und Cohen beschriebenen Effekt, der ein Licht auf die integrative Verarbeitung taktiler und visueller Reize des menschlichen Gehirns werfen kann 9. In dieser Studie war die Testanordnung wie folgt konzipiert: Ein Proband mit intakten Händen legt diese auf eine Tischplatte. Beide Hände werden seinem Anblick durch eine horizontale Deckplatte entzogen. Auf die Deckplatte werden den Positionen der Hände entsprechend zwei Handattrappen aus Gummi oder Kunststoff gelegt. Wenn nun ein Experimentator eine Hand des Probanden und die darüber liegende Kunsthand mittels zweier Pinsel in gleichgerichteten, synchronen Bewegungen überstreicht, kann es sein, dass der Proband die streichenden Bewegungen nicht an seiner wirklichen Hand wahrnimmt, sondern an der darüber liegenden künstlichen Hand, als sei diese ein Teil seines Körpers geworden. Die beiden beteiligten Sinnessysteme (optisch, taktil) lokalisieren die Pinselstriche zwar an unterschiedlichen Orten – das somatosensorische an der tatsächlichen Hand, das visuelle an der Kunsthand. Auf einer höheren Verarbeitungsebene des Gehirns aber setzt sich bei einigen Menschen sogleich, bei anderen erst nach einigen Wiederholungen des Experiments das visuelle System gegenüber dem somatosensorischen durch. Das Gehirn verlegt daher die taktile Empfindung auf die Kunsthand, an der es die Streichbewegungen gesehen hat.
Personen, die wie die Probandin eine myoelektrische Armprothese nutzen, können möglicherweise dank des von Botvinick und Cohen beschriebenen “Gummihandeffektes” die Sensation einer elektrisch stimulierten Phantomhand mit ihrer Prothesenhand zur Deckung bringen. Wahrscheinlich bedarf es dazu aber eines längeren Trainings. Der hier vorgestellten Patientin gelang es nicht, diese Kongruenz unter visueller Kontrolle vollständig zu verwirklichen. Ein Grund dafür mag darin liegen, dass ihre Prothese zur Gewichtsreduktion verkürzt werden musste. Bei weiteren Studien sollte diese Variable ausgeschlossen werden.
Ausblick
Gesteuert von Kontaktsensoren, die in eine Handprothese eingelassen werden, könnten Phantomempfindungen für einzelne Finger oder die ganze Hand elektrisch von rezeptiven Feldern ausgelöst werden, die am ipsilateralen Oberarm oder der Schulter ermittelt werden. Würde ein Patient mit einer technisch fortentwickelten Handprothese nach einem Gegenstand greifen und sich die künstlichen Finger um diesen schließen, könnte dies bei ihm die Empfindung auslösen, den Gegenstand mit einer intakten Hand zu berühren und zu halten.
Danksagung
Die Autoren danken der Probandin für ihre Bereitschaft, an der Studie teilzunehmen.
Für die Autoren:
Prof. Dr. rer. nat. Dr. med. habil.
Alfred Meier-Koll
Forschungsstelle für experimentelle
Ergo- und Physiotherapie
Diploma Hochschule
Allmannsweilerstr. 104
88046 Friedrichshafen
forschung.fn @ diploma.de
Begutachteter Beitrag/reviewed paper
Kruijen F, Meier-Koll A. Pilotstudie: Elektrische Phantomstimulation bei einer Patientin mit linksseitiger Armamputation. Orthopädie Technik, 2020; 71 (7): 59–63





- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Penfield W, Rasmussen T. The cerebral cortex of man. A clinical study of localization of function. New York: The Macmillan Comp., 1950
- Florence SL, Taub HB, Kaas JH. Large scale sprouting of cortical connections after injury in adult macaque monkeys. Science, 1998; 282 (5391): 1117–1121
- Pons TP, Garraghty PE, Ommaya AK, Kaas JH, Taub E, Mishkin M. Massive cortical reorganization after sensory deafferentation in adult macaques. Science, 1991; 252 (5014): 1857–1860
- Ramachandran VS, Hirstein W. The perception of phantom limbs. The D.O. Hebb lecture. Brain, 1998; 121:1603–1630
- Meier-Koll A, Friedel T, Raible T, Wycisk S. Entwicklung und Verteilung rezeptiver Hautzonen zur Anregung von Phantomempfindungen an Beinamputierten. Orthopädie Technik, 2018; 69 (8): 36–40
- Meier-Koll A. Ein Phantomstimulator für amputierte Gliedmaßen. Orthopädie Technik, 2013; 64 (5): 36–39
- Meier-Koll A, Weber KH. Fühlbare Beinprothesen. Orthopädie Technik, 2014; 65 (7): 50–55
- Schweisfurth MA, Markovic M, Bentz T, Wüstefeld D, Farina D, Dosen S. Sensorisches Feedback in der Handprothetik. Orthopädie Technik, 2017; 68 (7): 34–38
- Botvinick MM, Cohen J. Rubber hands “feel” touch that eyes see. Nature, 1998; 391: 756
