Christoph Jahnke ist einer der ersten Anwender, die mit dem Axon-Bus System „Michelangelo“ von der Firma Otto Bock versorgt wurden. Der 20-jährige Student lebt seit August 2012 in Krefeld und hat dort mit seinem dualen Chemiestudium angefangen. Das stellt eine neue Herausforderung für ihn persönlich, aber auch an seine Prothesenversorgung dar, denn er ist ohne rechten Unterarm zur Welt gekommen. Seit frühester Jugend trägt der gebürtige Pasewalker myoelektrische Armprothesen. Mit dem Beginn des neuen Lebensabschnittes beginnt für ihn auch das „Leben mit der Michelangelo-Hand“ (Abb. 1 u. 2).
„Axon“ steht für „Adaptive exchange of neuroplacement data“. Der „Axon-Bus“ ist eine Innovation der Firma Otto Bock für den Bereich der Exoprothetik. Das Datenübertragungssystem soll für den Anwender mehr Sicherheit, Zuverlässigkeit und reduzierte Empfindlichkeit gegenüber elektromagnetischer Störstrahlung bedeuten.
Vorversorgung
Christoph hat eine angeborene Fehlbildung und ist deshalb seit frühester Kindheit mit Armprothesen versorgt worden. Über die erste Patschhand-Versorgung ging es dann über das myoelektrische Kinderhandsystem bis hin zur Otto Bock Sensor-Systemhand. Bei seinen Versorgungen wurde eine Rotationseinheit mit einem Vierkanalsystem verbaut. Die beiden Elektroden waren in einen harten Karbonschaft eingesetzt. Um den kurzen Stumpf halten zu können, wurde er oberhalb der Kondylen im Schaft verklammert, zusätzlich trug der Patient eine Silikonhaltemanschette, die auf den Oberarm aufgerollt wurde.
Planung der Neuversorgung/Zielsetzung
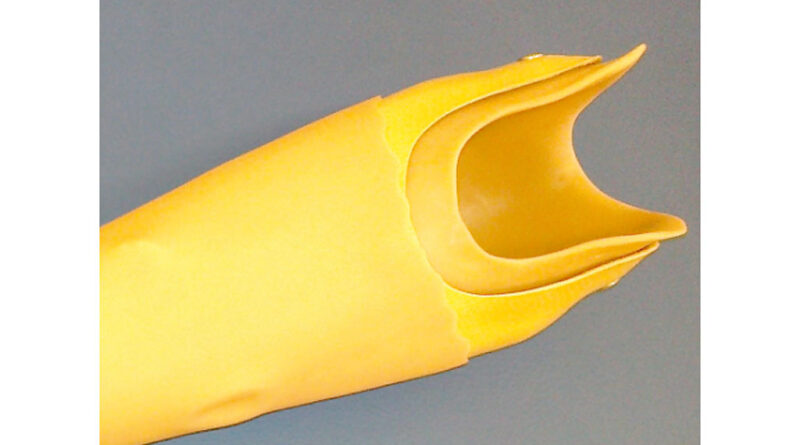
Schon in den ersten Gesprächen mit Christoph war klar, dass er aus dem neuen System maximalen Nutzen ziehen will. Deshalb brauchte er ein anderes Schaftsystem. Der heutige Standard für transradiale Schäfte in der Prothetik der oberen Extremität setzt einen flexiblen Schaft aus Silikon voraus (Abb. 3).
Bei Christophs Stumpfverhältnissen haben wir uns für einen HTV-Schaft mit MyoKontaktflächen (siehe OT 2/2012) entschieden. Ziel war es, ihm maximale Bewegungsfreiheit bei maximaler Haftung zu geben. Auch sollte eine deutliche Reduzierung der Fehl- und Ausgleichsbewegungen erreicht werden. Mit diesen Zielen ist der Einsatz der Michelangelo-Hand eine sinnvolle Versorgungsmöglichkeit. Das neue System setzt an den Anwender aufgrund seiner komplexen Technik neue Anforderungen, deshalb sollte unbedingt auf eine Einfassung des Oberarms verzichtet werden. So hat der Anwender noch mehr Bewegungsfreiraum.
Die Michelangelo-Hand
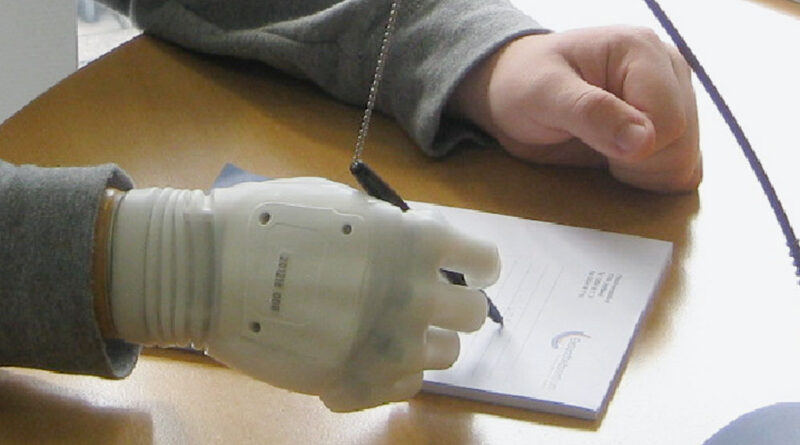
Der Anwender kann bei dem Michelangelo-System zwischen sieben Greifvarianten wählen. Die „Neutral Position“ dient dem physiologischen Erscheinungsbild (Abb. 4). So kann man beim Spazierengehen oder im Café sitzend eine natürliche Haltung der Hand einnehmen, dies geschieht beim Entspannen der Muskulatur. Im „Lateral Power Grip“ wird der Daumen seitlich zum Zeigefinger bewegt und kann zum Greifen mittlerer Gegenstände benutzt werden. Dies geschieht bei einer Griffkraft bis zu 60N. Die gleiche Daumenbewegung erkennt man beim „Lateral Pinch“. Hier fährt der Daumen mittig auf den Zeigefinger und ermöglicht dem Anwender z. B. das exakte Halten einer Kreditkarte oder das Führen eines Schlüssels.
Bei der „Open Palm“-Handstellung kann die Hand maximal geöffnet werden, der Daumen positioniert sich weit palmar. Mit dieser Handstellung ist es möglich, einen Teller auf der jetzt flachen Hand zu halten. Für das Ergreifen von großen Gegenständen kann in den „Opposition Power Grip“ umgeschaltet werden (Abb. 5). Bei der großen Handöffnung mit Daumenabspreizung kann eine Griffkraft von bis zu 70N [u5] aufgebaut werden. Dazu gegenteilig der „Tripod Pinch“, dabei bilden Daumen, Zeige- und Mittelfinger eine Dreipunktgriffmöglichkeit (Abb. 6). Bei diesem Griffmodus ist es möglich, kleine Objekte sicher zu greifen. Als siebte Handfunktion ist die „Finger Ab-/Adduction“ möglich. Beim Öffnen oder Schließen der Hand abduzieren oder adduzieren die Finger und machen es so dem Anwender möglich, flache Gegenstände zwischen den Fingern zu halten.
Die Griffkräfte in den verschiedenen Modi sind unterschiedlich, im Neutral Mode liegt eine Griffkraft von 15N an, im Lateral Mode 60N und im Opposition Mode sogar 70N. Die maximale Öffnungsweite im Open Palm Modus beträgt 120 mm.
Das neue Handsystem wird von einem flexiblen und oval gestalteten Handgelenk abgerundet (Abb. 7 u. 8). Der Anwender kann entscheiden, in welchem Winkel er es einstellt oder ob er es feststellt. In starrer Einstellung sind vier Stufen in der Flexion und drei Stufen in der Extension möglich. Die manuelle Rotation um 360 Grad ist im flexiblen und starren Modus einsetzbar.
Die Versorgung
Schon für die Testversorgung wurde für Christoph ein HTV-Schaft angefertigt. Von Anfang an sollte er die Vorzüge des neuen Systems spüren. Vor der ersten Testung war er noch skeptisch, da zurzeit noch keine elektrische Rotationsmöglichkeit zur Verfügung steht (Abb. 9a u. b). Aber schon nach kurzer Zeit war das kein Thema mehr. Durch die Möglichkeit der Daumenumpositionierung war es ihm schnell möglich, die fehlende elektrische Rotation zu vernachlässigen. Bei der Testversorgung wurde der HTV-Schaft noch mit Lotion angezogen, im Definitivschaft haben wir auf ein Einzugsystem unter Verwendung eines Saugschaftventils zurückgegriffen (Abb. 10). Das System steuert Christoph mit zwei Myo-Bock-Elektroden. Die Elektroden sind in einen für den Patienten nach Maß gefertigten HTV-Silikonschaft mit MyoKontaktflächen eingebettet.
Über die spezielle Computersoftware „AxonSoft“ wird das System mittels Bluetooth genau an die Bedürfnisse von Christoph angepasst und eingestellt. Bei ihm haben wir [u10] uns für das MultiGrip Programm entschieden. Den Modi-Wechsel erledigt der Student per Impulsumschaltung. Über einen kurzen schnellen Impuls, den er über eine der beiden Elektroden gibt, kann er vom Lateralgriff in den Oppositionsgriff umschalten und umgekehrt. Wenn er die Hand nicht nutzt, schaltet sie automatisch in einen Neutralmodus um, so lange, bis Christoph wieder eine Aktion ausführen will. Das Ganze wird mit dem „Natural Skin“-Prothesenhandschuh überzogen (Abb. 11). Das gibt der Versorgung ein gutes optisches Erscheinungsbild. Im Laufe der Testungen und auch im normalen Tagesgebrauch nutzt Christoph sein neues flexibles Handgelenk deutlich mehr als die starre Einstellung des Handgelenkes.
Systemvergleich
Die Michelangelo-Hand mit ihren vielen neuen Freiheitsgraden ist nicht mit den herkömmlichen Elektrohandsystemen vergleichbar (Abb. 12). Nimmt man die Vorversorgung von Christoph als Vergleich heran, so kann man sagen, dass er mit den Funktionsvorteilen des Michelangelo-Systems einem Verlustausgleich einen Schritt näher gekommen ist. So kann er durch die Umpositionierung des Daumens und die dadurch möglichen Griffkombinationen eine natürlichere Haltung bei noch größerem Bewegungsausmaß annehmen. Die jetzt mögliche, flexible Nutzung des Handgelenkes unterstützt ihn dabei, ein noch unauffälligeres Erscheinungsbild zu erreichen. Dieser Erfolg und der Einsatz eines für ihn auf seine Ansprüche entwickelten und abgestimmten Schaftsystems ermöglichen Christoph, deutlich mehr Bewegungsumfänge zu erlangen. Die Kompensationsbewegungen, die er mit seinem alten System machen musste, entfallen teilweise komplett oder befinden sich im Abbau.
Neue Griffmöglichkeiten eröffnen neue Perspektiven
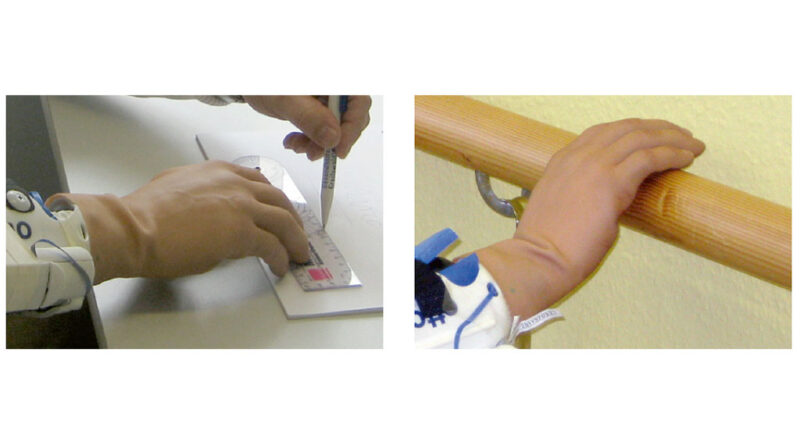
Auch der Anwender ist begeistert von den Erfolgen: „Endlich ein ovales, der erhaltenen Seite sehr ähnliches Handgelenk. Die Optik der neuen Hand ist sehr schön geworden“, freut sich Christoph, „dann die ganzen Griffmöglichkeiten der Hand, so konnte ich noch nie einen Teller in der offenen Prothesenhand halten und am Büfett das Essen auffüllen. Auch die Umpositionierung des Daumens war für mich noch nie möglich. So kann ich das Messer beim Pizzaschneiden viel besser halten (Abb. 13 u. 14). Die verschiedenen Griffmöglichkeiten nutze ich nun im täglichen Gebrauch und das geschieht ganz natürlich. Und auch das flexible Handgelenk ist ein echter Gewinn für mich. Fehlbewegungen, die ich vorher noch machen musste, belasteten meine Schulter, ich war immer verspannt. Jetzt kann ich mich viel lockerer bewegen. Und natürlich auch mein neuer HTV-Silikonschaft. Er lässt viel mehr Bewegungsraum für mich zu. Gerade im praktischen Teil meines Studiums werde ich die Vorteile der neuen Versorgung genießen können. Dort habe ich mit vielen kleinen und großen Objekten zu tun, die ich hin und her positionieren muss. Viele Gegenstände muss ich vorsichtig anfassen, andere verlangen es, dass ich zupacken kann.“
Fazit
Christoph war von den Vorzügen gleich nach den ersten Tests überzeugt, weil er die neuen Griff- und Greifvarianten instinktiv und schnell umsetzen konnte. Mit dieser Versorgung fühlt er sich wohler, weil sein Umfeld nicht gleich wahrnimmt, dass er eine Prothese trägt. Dieses ist auch dem neuen Handgelenk zuzuschreiben. Fehlbewegungen seines Körpers, die er mit seiner herkömmlichen Versorgung noch machen muss, fallen weg. Das ist ein entscheidender Zugewinn an Lebensqualität für Christoph. Die Funktionsmöglichkeit des flexiblen Modus ist von unschätzbarem Vorteil für den Anwender. Leider ist die Hand zurzeit nur in einer Größe erhältlich, aber die Entwicklung geht weiter. Schon bald soll die elektronische Rotation dazu kommen.
Das Ziel muss sein, dass der Anwender seinen Lebensalltag besser bewerkstelligen kann und seine Lebensqualität steigt. Auch die Einbindung des Kostenträgers ist ein wichtiger Bestandteil der prothetischen Versorgung sowie ein Schulungskonzept für Techniker, Therapeuten und Anwender.
Der Autor:
Hans-Magnus Holzfuß
Gesundheitszentrum Greifswald GmbH
Fleischmannstr.6
17489 Greifswald
h.holzfuss@gesundheitszentrum-greifswald.de
Begutachteter Beitrag/Reviewed paper
Holzfuß H‑M. Neue Greifmöglichkeiten für Armamputierte – Versorgung mit der Michelangelo-Prothesenhand. Orthopädie Technik, 2013; 64 (2): 26–30







- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
