Neuartige Lösungen wie die Verarbeitung der EMG-Information mit Mustererkennung können helfen, diese Hürden zu überwinden. Erste klinische Ergebnisse der Steuerung „Myo Plus“ in der Heimanwendung zeigen, dass oftmals intuitive Phantombewegungen zur Steuerung mehrerer Gelenke der Prothese eingesetzt werden können. Weitere Studien zur Bestätigung dieser vielversprechenden Ergebnisse sind angezeigt.
Einleitung – die konventionelle myoelektrische Steuerung
Myoelektrisch gesteuerte Armprothesen sind Fremdkraftprothesen, deren elektromechanische Komponenten durch elektrische Energie bewegt werden. Ihre Steuerung erfolgt über Muskelaktionspotenziale des Stumpfes. Bei der Kontraktion der Stumpfmuskulatur lässt sich auf der Hautoberfläche eine elektrische Spannung im Mikrovolt-Bereich (1 μV = 1 Millionstel Volt) messen. Diese körpereigenen Potenziale werden von Elektroden abgenommen, verstärkt und als Schaltimpulse an einen Elektromotor weitergeleitet. Die Entwicklung dieser myoelektrischen Steuerung war von essenzieller Bedeutung für den Erfolg der elektrischen Prothesenhände 1.
Konventionelle Steuerungsmethoden für myoelektrische Prothesen der oberen Extremität basieren auf der Verarbeitung der Signale von ein bis zwei Elektroden. Dabei steuert ein(e) Muskel(gruppe) genau eines der Signale, das in der Prothese direkt in eine Bewegung übersetzt wird. Sollen mehr Funktionen kontrolliert werden, als Elektroden vorhanden sind, setzt man unterschiedliche Schaltmechanismen ein, um von einer Funktion zur nächsten zu gelangen. Um der wachsenden Zahl ansteuerbarer Prothesenfunktionen wie z. B. unterschiedlichen Griffarten gerecht zu werden, wurden in den vergangenen Jahren ergänzende Steuermethoden auf den Markt gebracht.
Was ist Mustererkennung?
Anstatt einer oder zweier Elektroden auf individuell selektierten Muskelgruppen wird bei Prothesen mit Mustererkennung eine Vielzahl von Elektroden verwendet: In der Regel werden 6 bis 10 Elektroden eingesetzt und in gleichmäßigen Abständen um den Stumpf verteilt. Dadurch können nicht nur einzelne, sondern (fast) alle Muskelsignale gleichzeitig erfasst werden; die Bestimmung der korrekten Elektrodenposition über Myo-Tests entfällt. Der Anwender führt mit seiner Phantomhand eine Reihe unterschiedlicher Bewegungen aus wie „Hand öffnen“, „Hand schließen“, „Pronation“ etc.; oft lassen sich auch willentlich einzelne Finger bewegen. Bei jeder dieser gedachten Bewegungen mit der Phantomhand wird ein ganz charakteristisches Zusammenspiel der Muskeln im Stumpf aktiv; es entsteht ein individuelles Aktivitätsmuster.
Genau diesen Effekt nutzt die Mustererkennung: Anstatt nur einzelne Muskeln isoliert zu betrachten, werden bei der Mustererkennung ganze Muskelaktivitätsmuster analysiert. Dadurch lässt sich eine feinere, selektivere und oftmals intuitivere Steuerung der Prothese umsetzen. Diese Muster sind bei jedem Menschen zumindest leicht unterschiedlich und variieren noch stärker bei Personen mit einer Amputation, da die anatomischen Unterschiede verletzungs- und operationsbedingt größer sind.
Wie kann die Mustererkennung die Aktivitätsmuster den Arm- und Handbewegungen zuordnen? Dazu muss jede Mustererkennung individuell an den Anwender angepasst werden. Dies geschieht während einer Trainingsphase. Darin wird der Anwender aufgefordert, eine Reihe von Bewegungen in vordefinierter Reihenfolge und Dauer durchzuführen. Diese Aufforderung kann zum Beispiel über ein Computerprogramm, eine Smartphone-App oder die Prothese selbst erfolgen (diese bewegt sich dabei, und der Anwender imitiert die ausgeführte Bewegung). Da der Bewegungsablauf vordefiniert ist, weiß die Mustererkennung in dieser Phase genau, welches Muskelaktivierungsmuster mit welcher Prothesenbewegung korrespondiert. Dieser Vorgang wird einige Male wiederholt, um die Variabilität der Muskelaktivierung abzubilden. In dieser Anpassungsphase „lernt“ die Mustererkennung also, eine Zuordnung von „Muskelaktivierung X“ zu „Prothesenbewegung Y“ herzustellen. Nach abgeschlossener Anpassungsphase ist in der Mustererkennung diese Zuordnung fest gespeichert. Führt der Prothesenanwender nun „Muskelaktivierung X“ aus, so vergleicht die Mustererkennung innerhalb weniger Millisekunden alle gespeicherten Muskelaktivierungs-zu-Prothesenbewegungs-Paare und führt die korrespondierende „Prothesenbewegung Y“ aus.
Was bedeutet das in der Praxis? Während der Anpassungsphase wird der Prothesenanwender beispielsweise dazu aufgefordert, ein Muster für „Öffnen der Prothesenhand“ auszuführen. Er führt dazu mit seiner Phantomhand eine Bewegung aus, die dem Strecken der Finger entspricht; die Muskeln in seinem Stumpf spannen sich dabei entsprechend an. Zukünftig kann der Anwender also gedanklich mit seiner Phantomhand die Finger strecken, und die Prothesenhand wird sich dabei öffnen. Dasselbe gilt zum Beispiel für das gedachte Beugen von Zeige- und Mittelfinger für das Schließen der Prothese etc.
Dadurch wird ersichtlich: Je nach Fähigkeit und Vorliebe des Anwenders können unterschiedlichste Bewegungsmuster verwendet werden, um die Prothese zu steuern. Essenziell ist dabei nur, dass die Zuordnung von gedachter Bewegung zu Prothesenbewegung für den Anwender eindeutig ist und daher immer wieder mit gleicher Qualität reproduziert werden kann, sowie klar voneinander trennbare Muster. Je nach den Fähigkeiten des Anwenders können so oft vier, fünf oder sogar acht verschiedene Muster für die Prothesensteuerung verwendet werden statt zwei wie bei der herkömmlichen Steuerung. Diese Fähigkeiten hängen dabei von unterschiedlichen Faktoren ab: von der Ursache für das Fehlen der Gliedmaße (Amputation oder angeborene Fehlbildung), von der Stumpflänge, von der Zeit seit der Amputation, von anatomischen Veränderungen durch die Amputation und von Operationen, um nur einige zu nennen.
„Myo Plus“: Mustererkennung in der prothetischen Versorgung
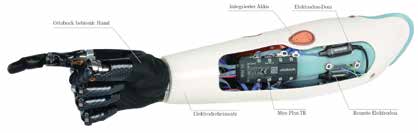
„Myo Plus“ ist ein Produkt von Ottobock, das das Prinzip der Mustererkennung für die Prothesensteuerung der bebionic-Hand und des Myo-Bock-Systems einsetzt (Abb. 1). „Myo Plus“ besteht dabei aus einer zentralen Steuerungseinheit („Myo Plus TR“), bis zu acht speziell für diese Anwendung entwickelten Elektroden sowie einer Einstell-App, der Myo-Plus-App.
Die zentrale Steuerungseinheit „Myo Plus TR“
„Myo Plus TR“ (TR für transradial) ist das Herzstück des Myo-Plus-Systems (Abb. 2). Es verarbeitet die erfassten Muskelsignale von bis zu acht Elektroden, führt mit diesen Daten die Mustererkennung durch und steuert die angeschlossenen Prothesenkomponenten. Die Aktualisierung der Bewegungskommandos an die Prothese erfolgt dabei 40 Mal pro Sekunde. Außerdem ermöglicht „Myo Plus TR“ die Kommunikation zwischen Prothese und Einstell-App.
Remote-Elektroden
Die Remote-Elektroden erfassen die Muskelsignale der im Stumpf befindlichen Muskulatur. Die Signale werden speziell für die Mustererkennung aufbereitet und dann an das Myo-Plus-TR-System geleitet. Da eine Vielzahl von Elektroden im Schaft untergebracht werden muss, wurde die Remote-Elektrode auf ein besonders flaches Design hin optimiert (Abb. 3). Zwei erhältliche Kabellängen ermöglichen sowohl bei kürzeren als auch bei längeren Stümpfen kosmetisch hochwertige Versorgungen.
Myo-Plus-Einstell-App
Wie oben erläutert, ist die Anpassungsphase ein wichtiger Schritt, damit das System die individuellen Muskelaktivitätsmuster des Anwenders „erlernen“ kann. Bei „Myo Plus“ wird hierzu eine Einstell-App verwendet. Diese wird auf einem Tablet oder Smartphone installiert und per Bluetooth® mit der Myo-Plus-TR-Steuerungseinheit in der Prothese verbunden.
Die Einstell-App visualisiert die gemessenen Bewegungsmuster und ermöglicht dem Orthopädie-Techniker die Anpassung der Prothesensteuerung. Der Anwender kann anschließend diesen Vorgang selbstständig begleiten und weitere Anpassungen vornehmen. Die Visualisierung der Muskelaktivität hilft dem Anwender, seine individuellen Muster zu trainieren, um sie noch gezielter abrufen zu können.
Myo-Manschette als Erprobungs- und Trainingswerkzeug
Die Myo-Manschette (Abb. 4) beinhaltet alle Komponenten des Myo-Plus-Systems und passt für die meisten Stumpfgegebenheiten (Ausnahme: ultrakurze Stümpfe). Sie ermöglicht eine erste Systemprobe, noch bevor ein Prothesenschaft aufwendig gefertigt werden muss. Dadurch lassen sich Wartezeiten mit effektivem Training überbrücken, es können erste Tauglichkeitstests und Analysen durchgeführt werden, und das Prinzip der Mustererkennung kann anschaulich erklärt werden. Die Myo-Manschette wird um den Stumpf getragen und mit der App verbunden. Man kann dann sämtliche Versorgungsszenarien durchspielen und zum Beispiel Signalqualität und ‑wiederholbarkeit analysieren, Funktionen prüfen sowie eine Auswertung erstellen.
Schaftbau
Bei konventionellen Systemen werden nur zwei Elektroden im Schaft verbaut; bei der Mustererkennung mit „Myo Plus“ dagegen werden bis zu acht Elektroden benötigt – wie wird dies bewerkstelligt? Um den Einbau im Schaft, einen verlässlichen Hautkontakt sowie eine geringe Aufbauhöhe zu gewährleisten, wurde ein neues Elektrodenkonzept verwirklicht: Anders als bei herkömmlichen Elektroden, in denen üblicherweise Hautkontakte und Elektronik in einem Gehäuse vereint sind, wurden diese Komponenten bei den Myo-Plus-Elektroden getrennt. Die Hautkontakte werden per Kabel aus dem Gehäuse geleitet (daher die Bezeichnung „Remote-Elektrode“). Dadurch ist es nicht notwendig, für jede Elektrode ein Fenster in den Prothesen-Innenschaft zu schneiden bzw. zu schleifen – es reicht aus, ein entsprechendes Loch zu bohren, die Kontakte hindurchzustecken und festzuschrauben. Die Hautkontakte der Remote-Elektrode verfügen über eine 5‑mm-Gewindemutter.
Die empfohlene Platzierung der Elektrodenkontakte kann mit Hilfe eines im Lieferumfang enthaltenen elastischen Positionierbandes ermittelt werden. Dieses wird auf den Prothesen-Innenschaft aufgezogen. Für die Hautkontakte selbst werden pilzförmige Dome aus Titan eingesetzt. Diese sind in drei unterschiedlichen Höhen verfügbar, um Volumenschwankungen und unterschiedliche Weichteildeckungen des Stumpfes ausgleichen zu können. Um die Elektronik der Elektroden einfacher im Schaft unterbringen zu können, sind diese für eine optimale Anpassung und Raumnutzung bei unterschiedlichen Stumpfverhältnissen mit zwei unterschiedlichen Kabellängen verfügbar. Durch ein stark verbessertes Bluetooth®-Modul kann die Myo-Plus-TR-Steuerungseinheit beliebig im Schaft platziert werden, auch wenn Carbon als Außenschaftmaterial verwendet wird. Trotz all dieser Optimierungen bleibt allerdings der Nachteil bestehen, dass mehr Komponenten als bei einem konventionellen System in der Prothese unterzubringen sind. Es ist daher immer individuell vom Orthopädie-Techniker zu beurteilen, ob die Stumpfverhältnisse und das zu erwartende kosmetische Ergebnis eine Versorgung mit „Myo Plus“ erlauben.
Training
Wie bei jeder Eingewöhnung an etwas Neues bedarf es auch bei einem Mustererkennungssystem einer Trainingsphase zum Erlernen der Handhabung. Der Prothesenanwender muss lernen, sämtliche Aktivierungsmuster präzise in allen Lebenslagen zu reproduzieren. Außerdem ist es notwendig, dass die Muster unterschiedlich genug sind, um von der Steuerung identifiziert werden zu können. Um die Trainingsphase zu erleichtern und um Einblick in die Form der Aktivierungsmuster zu geben, verfügt die Myo-Plus-App über eine Anzeige der erfassten Signale. Diese werden radial in einem Netzdiagramm, dem sogenannten Spiderplot, dargestellt (Abb. 5). Die Anzeige der Muskelaktivität in Echtzeit erlaubt dem Anwender, die Erzeugung eindeutiger Muster zu trainieren und die bereits gespeicherten Muster mit seinen aktuellen zu vergleichen. Stimmt ein gewolltes Muster nicht mit jenem überein, das im Myo-Plus-System gespeichert ist, so kann entweder die Ausübung der Muskelkontraktionen trainiert und verfeinert oder die gespeicherte Form der Bewegungen mit einer erneuten Anpassungsphase optimiert werden. Die Einstell-App bietet somit eine bei konventionellen Systemen nicht bekannte Möglichkeit, die Trainingsphase der Prothesensteuerung zu begleiten.
Studienergebnisse
In den Jahren 2016/2017 wurde eine klinische Studie mit einer ersten, nicht kommerziell verfügbaren Version des Myo-Plus-Systems durchgeführt. Insgesamt wurden 9 Probanden in die Studie aufgenommen (Geschlecht: 7 männlich, 2 weiblich; Alter: Ø 46 Jahre; Jahre seit Amputation: Ø 12; Ursache: 8 Trauma, 1 Dysmelie). Alle Probanden waren mit myoelektrischen Prothesen mit konventioneller Steuerung versorgt. Die folgenden Outcome-Messungen wurden durchgeführt:
- modifizierter Box-and-Block-Test,
- standardisierter Wäscheklammer-Test sowie
- der Fragebogen „Disabilities of the Arm, Shoulder and Hand“ (DASH).
Die Messungen wurden zunächst mit der konventionellen Steuerung („Konventionelle Steuerung Baseline“), im Anschluss mit dem Myo-Plus-System nach Versorgung und Training („Myo Plus Follow-up 1“), mit dem Myo-Plus-System nach 4 Wochen Heimanwendung („Myo Plus Follow-up 2“) und dann wieder mit der konventionellen Steuerung („Konventionelle Steuerung Studienende“) durchgeführt. 8 der 9 Patienten absolvierten die minimale Testzeit von einem Monat per Heimnutzung des Systems; ein Patient schied aufgrund gesundheitlicher Probleme vorzeitig aus 2. Alle Teilnehmer wurden beim ersten Besuch zufriedenstellend mit der Mustererkennungsprothese versorgt. Der gesamte Anpassungs- und Trainingsprozess wurde als „klar“ oder „leicht unklar“ eingestuft, ohne oder mit leichten Schwierigkeiten, den Anweisungen zu folgen (Anpassungsprozess-Fragebogen: mittlere Punktzahl 1,7 ± 0,24; Trainingsprozess-Fragebogen: mittlere Punktzahl 1,8 ± 0,82; Skala von 1 (sehr gut) bis 5 (sehr schlecht)) 3.
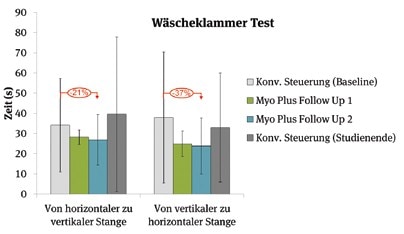
Während bei einfachen Aufgaben mit Ansteuerung eines Freiheitsgrades der Prothese keine Verbesserung mit Mustererkennung festgestellt werden konnte (modifizierter Box-and-Block-Test), konnte die Fähigkeit, zwei Freiheitsgrade zu kontrollieren („Hand öffnen/schließen“ und „Handgelenkdrehung“) beim standardisierten Wäscheklammer-Test verbessert werden. Bei diesem Test müssen im ersten Durchgang 3 Wäscheklammern von 3 horizontalen Stangen auf eine vertikale, höher liegende Stange übertragen werden. Im zweiten Durchgang müssen die 3 Klammern von der vertikalen zurück auf die 3 horizontalen Stangen transferiert werden. Der Transport der Wäscheklammern von den horizontalen zur vertikalen Stange wurde bei den Teilnehmern mit erworbener einseitiger transradialer Amputation, die eine aktive Handgelenksrotation verwendeten, um 21 % verbessert (durchschnittlich 7,0 s kürzer). Der Transfer von der vertikalen zu den horizontalen Stangen verbesserte sich um 37 % (durchschnittlich 14,0 s kürzer) im Vergleich zur initialen Messung mit konventionellem Steuerungssystem (Abb. 6). Die Ergebnisse mit der konventionellen Steuerung sind zu Beginn und am Ende der Studie sehr ähnlich. Das zeigt, dass die Verbesserung nicht nur durch das Erlernen der Aufgabenstellung erfolgte 4.
Im DASH-Fragebogen werden unterschiedliche Aspekte zur Lebensqualität von Personen mit Einschränkungen der oberen Extremität bewertet. Die Amputierten berichteten in dieser Studie über 50 % Verbesserung mit Mustererkennung beim DASH-Arbeitsmodul. Dagegen war der Gesamtwert für DASH und das DASH-Sports/Performing-Arts-Modul im Durchschnitt bei beiden Steuerungsvarianten ähnlich 5.
Fazit
Bei der prothetischen Versorgung der oberen Extremität ist die Verwendung von Elektromyographie (EMG) Stand der Technik zur Steuerung fremdkraftbetätigter Prothesen. In der Regel werden zwei Oberflächen-EMG-Elektroden im Prothesenschaft verbaut. Die von den Elektroden aufgezeichneten neuronalen Informationen werden zur Steuerung diverser Freiheitsgrade verwendet, z. B. zur Außen- und Innenrotation im Handgelenk sowie zum Öffnen und Schließen der Handprothese.
Multiartikulierende Prothesenhände haben die Grenzen der myoelektrischen Prothesenversorgung weiter nach oben verschoben: Einzeln bewegliche Finger eröffnen neue Funktionen und lassen die Hand natürlicher wirken. Die Vielzahl von Griffmöglichkeiten bedeutet allerdings eine neue Herausforderung bezüglich der Ansteuerung für den Anwender, bei der die konventionelle Steuerung mit zwei Elektroden an ihre Grenzen stößt. Mit dem Einsatz von Mustererkennung ermöglicht die Myo-Plus-Steuerung erstmals die direkte und intuitive Ansteuerung einzelner Griffe der bebionic-Hand ohne Umschalten. Dies erlaubt es, das Potenzial der multiartikulierenden Hand besser auszuschöpfen. Erste klinische Ergebnisse zeigen, dass die Myo-Plus-Steuerung außerdem bei der Ansteuerung zweier Gelenke (Öffnen und Schließen der Hand sowie Handgelenkrotation) eine messbare Verbesserung liefern kann.
Für die Autoren:
Dipl.-Ing. (FH) Michael Auer
Product Manager
Strategic Marketing Unit Upper Limb Prosthetics
Otto Bock Austria Gesellschaft m.b.H.
Brehmstraße 16, A‑1110 Wien
michael.auer@ottobock.com
Begutachteter Beitrag/Reviewed paper
Auer M., Popovic I., Amsüß S. „Myo Plus“: innovatives Steuerkonzept für transradiale myoelektrische Armprothesen. Orthopädie Technik, 2019; 70 (8): 30–34




- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Näder HG (Hrsg.), Milde L. Otto Bock Prothesen-Kompendium. Prothesen für die obere Extremität. Duderstadt: Otto Bock HealthCare Group, 2011
- Amsüß S, Popovic I, Bischof B, Fuchsberger T, Hahn A. Biofeedback Training for Pattern Recognition Results in Better Prosthetic Control. [Poster Presentation] AOPA National Assembly, Vancouver, Sep 26–28, 2018
- Amsüß S, Popovic I, Bischof B, Fuchsberger T, Hahn A. Biofeedback Training for Pattern Recognition Results in Better Prosthetic Control. [Poster Presentation] AOPA National Assembly, Vancouver, Sep 26–28, 2018
- Amsüß S, Popovic I, Bischof B, Fuchsberger T, Hahn A. Biofeedback Training for Pattern Recognition Results in Better Prosthetic Control. [Poster Presentation] AOPA National Assembly, Vancouver, Sep 26–28, 2018
- Amsüß S, Popovic I, Bischof B, Fuchsberger T, Hahn A. Biofeedback Training for Pattern Recognition Results in Better Prosthetic Control. [Poster Presentation] AOPA National Assembly, Vancouver, Sep 26–28, 2018
