Einleitung
Der AxonHook (Abb. 1; technische Informationen in Tab. 1) ist eine myoelektrische Ergänzungsversorgung zur Michelangelo-Hand und somit im Gegensatz zu den Versorgungsalternativen „DMC-VariPlus-Greifer“ von Ottobock und „ETD Hook“ von Motion Control für das Axon-Bus-Prothesensystem konzipiert. Durch das modulare Prothesensystem kann der Anwender selbstständig zwischen dem AxonHook und der Michelangelo-Hand wechseln. Der Greifer wurde entwickelt, um Prothesenträgern im Unter- und Oberarmbereich zusätzliche Funktionen und Möglichkeiten zu bieten. Insbesondere können Anwender mit hohen Ansprüchen an Präzision und Geschicklichkeit bei feinmotorischen oder kraftvollen Greifaktivitäten davon profitieren. Die Auslegung des Designs orientiert sich an kraftzuggesteuerten Prothesen. Nur eine der beiden Hakenspitzen wird beim Öffnen und Schließen durch einen Motor bewegt. Dadurch wird dem Anwender ein zuverlässiges und präzises Greifverhalten ermöglicht. In diesem Artikel werden die wichtigsten technischen Konzepte und Funktionen des Greifers zusammengefasst und die Resultate der ersten Testversorgungen vorgestellt.
Konzept und Funktionen
Greifhaken
Die Formgebung der Greifhaken wurde so gewählt, dass der AxonHook das Greifen sowohl von kleinen als auch von großen Gegenständen verbessert und damit dem Anwender ein möglichst breites Spektrum an Möglichkeiten bietet. Das schlanke Design der Greifhaken erlaubt dem Anwender gegenüber dem DMC-VariPlus-Greifer einerseits verbesserte Sicht auf die Hakenspitzen, wodurch das Positionieren des AxonHook auf den zu greifenden Gegenstand erleichtert wird, und andererseits das Greifen in tiefe Gegenstände wie zum Beispiel in eine Kiste. Die gebogene Form der Haken hat im Alltag weiterhin den Vorteil, dass Gegenstände mit einer Schlaufe, einem Stab oder Ähnlichem mit hängendem Arm ohne Greifbewegung transportiert werden können.
Um Gegenstände sicher zu greifen, wird bei kleinen Gegenständen ein optimaler Formschluss, bei großen und runden Gegenständen dagegen hinreichend Reibung benötigt. Beides wird beim AxonHook an den Haken durch eine Ummantelung aus Polyurethan erreicht, das eine besonders hohe Abriebfestigkeit aufweist. Dadurch können Gegenstände mit einem Durchmesser bis zu 125 mm sicher gegriffen und gehalten werden. Die vollständige Ummantelung bietet nicht nur Sicherheit beim Greifen, sondern auch beim Positionieren von Gegenständen auf dem Rücken des AxonHook oder bei der Manipulation von Gegenständen mit der Handkante (Abb. 2). Bei Bedarf können die Haken durch den Orthopädie-Techniker getauscht werden.
Gleichzeitig ist das Design auf maximale Strukturfestigkeit ausgelegt, was dem Anwender hohe Sicherheit vor Bruch beim Heben schwerer Lasten bietet. Dafür wird Titan verwendet, das durch ein Gieß-Sinterverfahren in Form gebracht wird. Zur Kontrolle der Fertigungsergebnisse wurde unter anderem die Computertomographie eingesetzt. Durch den angewendeten Leichtbau wiegt der Greifer inklusive Handgelenk nur 400 g.
Griffkraft
Bei einem präzisen Griff kann die menschliche Hand eine durchschnittliche Griffkraft von bis zu 95,6 N erreichen 1. Laut Heckathorne et al. ist eine Griffkraft von 65 N notwendig, um Alltagsaktivitäten ausführen zu können 2. Der AxonHook übertrifft beide Werte deutlich mit einer Griffkraft an den Hakenspitzen von 110 N. Damit weist er auch eine höhere Griffkraft als die Michelangelo-Hand mit 70 N auf 3 . Über die proportionale Myosteuerung sind aber auch deutlich geringere Kräfte regelbar. Dank der Selbsthemmung des Getriebes bleibt die Griffkraft nach Abschaltung des Motors erhalten. Damit hat der Anwender Gegenstände selbst dann fest im Griff, wenn die Muskeln nach dem Schließen entspannt werden. Zudem garantieren weitere implementierte Stromsparmaßnahmen dem Anwender eine möglichst hohe Nutzungsdauer. So wird 300 Millisekunden nach Stillstand des Motors der „Low-Power-Modus“ aktiviert, wodurch der Stromverbrauch auf ein Drittel im Vergleich zum normalen Betriebsmodus reduziert werden kann.
Der laterale Haken ist feststehend, während der mediale Haken die Greifbewegung ausführt, was die Daumenbewegung der menschlichen Hand wie z. B. beim Präzisionsgriff nachahmt. Dadurch wird dem Anwender ein präzises Greifverhalten erleichtert, das besonders bei feinmotorischen Tätigkeiten relevant ist. Herzstück des Antriebs ist ein leistungsstarker bürstenloser Motor, der eine feine und kraftvolle Ansteuerung ermöglicht. Der Antriebsstrang des Greifers kommt gänzlich ohne Schaltstufe aus, Lagerstellen wurden zum Beispiel als Paarungen von Keramikachsen mit gehärteten Stahlbuchsen ausgelegt, die Steuerung kommt mit einer einfachen Sensorik zur Detektion von Motordrehzahl und Stromverbrauch aus. Aus diesen zwei Parametern wird die Öffnungsweite, verwendet bei der automatischen Neutralposition oder der aktiven Kontakterkennung, ermittelt. Um zusätzlich gegen Umwelteinflüsse des Alltags geschützt zu sein, ist die Elektronik- und Getriebebox nach Schutzklasse IP33 abgedichtet.
Flexionshandgelenk
Ein wichtiges Merkmal des AxonHook ist das Flexionshandgelenk, das sich bereits bei der Michelangelo-Hand bewährt hat. Es konnte gezeigt werden, dass die Michelangelo-Hand aufgrund des aktiven Daumens in Kombination mit dem Flexionshandgelenk aktiver und bei mehr Alltagsaktivitäten eingesetzt wird 4. Der flexible Modus des Flexionshandgelenks unterstützt physiologisch korrekte Bewegungsabläufe und reduziert Ausgleichsbewegungen im Schulterbereich 5. Im fixierten Modus bietet es die Steifigkeit, die für hochpräzise Greif- und Manipulationsaufgaben notwendig ist. Ebenfalls von der Michelangelo-Hand übernommen wurde die Neutralposition: Wird das Greifgerät komplett geöffnet und kein weiteres Myosignal angelegt, fährt der Greifer automatisch langsam in eine leicht geöffnete Stellung. Das erleichtert dem Anwender zu wissen, in welcher Öffnungsstellung sich der Greifer befindet. Gleichzeitig ist in diesem Modus die Kontakterkennung aktiv, die beim Berühren eines Gegenstandes zwischen den beiden Haken die Bewegung sofort stoppt und den Gegenstand mit geringer Griffkraft hält. Somit kann die rückführende Bewegung in die Neutralposition auch dazu genutzt werden, gezielt einen sensiblen Gegenstand mit geringer Griffkraft zu greifen.
Axon-Bus-Komponente
Das Akronym „Axon“ steht für „adap tive exchange of neuroplacement data“. Die Technologie stammt ursprünglich aus der Luftfahrt und der Automobilindustrie und wurde erstmalig von Ottobock im Bereich Exoprothetik verwendet. Im Gegensatz zu konventionellen Prothesensystemen ermöglicht der Axon-Bus dem System, sich an die jeweils angeschlossene Kombination von Komponenten anzupassen. Die Bus-Topologie gewährleistet zudem eine einfache nachträgliche Erweiterung des Systems durch zusätzliche Produkte wie z. B. eine aktive Rotation oder den AxonHook. Durch die laufende Kommunikation aller Prothesenkomponenten können Fehler erkannt und entsprechend darauf reagiert werden. Des Weiteren wird dadurch die zentrale Konfiguration des gesamten Systems über eine einzelne Bluetooth-Verbindung ermöglicht.
Erste Ergebnisse und Erfahrungen mit dem neuen Greifer
Während fünf AxonHook-Versorgungen wurden sowohl von den Anwendern als auch von den jeweiligen Orthopädie-Technikern die ersten klinischen Daten in Bezug auf Funktionalität, Verwendung im Alltag und Zufriedenheit gesammelt. Zur Datensammlung wurden Fragebögen verwendet. Wo möglich, wurden für die Antwortmöglichkeiten 4‑Punkt-Likert-Skalen verwendet. Zur Analyse wurde die deskriptive Statistik angewendet.
Bei den Anwendern handelte es sich um vier unilateral amputierte und eine bilateral unterarmamputierte Person. Zwei Anwender waren vor dem AxonHook mit dem VariPlus-Greifer von Ottobock versorgt, ein Anwender mit dem ETD Hook von Motion Control, ein Anwender hatte keine Erfahrung mit Greifern. Von einem Anwender fehlte diese Information.
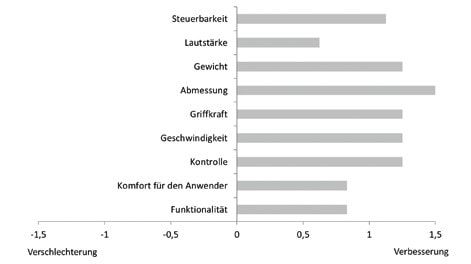
Die Bewertung der Funktionalität des AxonHook im Vergleich zur vorherigen Prothese durch den versorgenden Orthopädie-Techniker kann Abbildung 3 entnommen werden. Alle abgefragten Eigenschaften wurden durchschnittlich als verbessert bewertet. Am positivsten wurde die Abmessung bewertet, was auf die Formgebung der Greifspitzen zurückzuführen ist. Am wenigsten positiv wurde die Lautstärke des neuen Greifers bewertet. Im Vergleich zum VariPlus-Greifer und dem ETD Hook wurden alle Funktionalitäten mit dem AxonHook von den Orthopädie-Technikern als verbessert bewertet, mit Ausnahme der Betriebsdauer.
Die Anwender berichteten, dass sie den Greifer im Durchschnitt über 6 Stunden pro Tag verwendet haben.Dabei konnten, abhängig von der beruflichen Tätigkeit, große Varianzen im Bereich zwischen 2 und 15 Stunden festgestellt werden. Die Wichtigkeit des AxonHook neben der Michelange-lo-Hand wurde durchschnittlich mit 1,6 Punkten auf einer Skala von 1 für „sehr wichtig“ bis 4 für „nicht wichtig“ bewertet. Die aufgezählten Aktivitä-ten beinhalteten hauptsächlich handwerkliche Arbeiten wie zum Beispiel das Arbeiten in einem landwirtschaftlichen Betrieb, Schreinerarbeiten oder Gartenarbeiten.
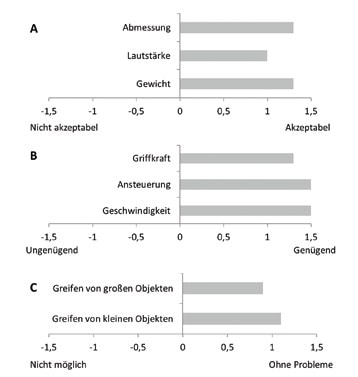
Die Resultate bezüglich der Zufriedenheit der Anwender mit verschiedenen Aspekten sind in Abbildung 4 dargestellt. Bei der Charakteristik des AxonHook wurden die Abmessungen (Größe und Form der Haken) und das Gewicht am positivsten bewertet (A). Hinsichtlich der Funktionalität wurden alle drei Faktoren (Griffkraft, Ansteuerung und Geschwindigkeit) mit hoher Zufriedenheit und Punkten von 1,3 bis 1,5 bewertet (B). Das Greifen großer Gegenstände wurde mit 0,9 Punkten, das Greifen kleiner Gegenstände mit 1,1 Punkten bewertet. Gegenüber dem VariPlus-Greifer wurden mit dem Axon-Hook die Funktionen Ansteuerung und Griffkraft mit 1,5 Punkten als größter Vorteil bewertet. Einzig bei der Bewertung der Greifaktivitäten konnten klei-ne Unterschiede zwischen AxonHook und VariPlus-Greifer beobachtet werden. Gegenüber dem ETD Hook wurden alle Charakteristiken, Funktionalitäten und Greifaktivitäten mit 1,5 Punkten als verbessert bewertet.
Fazit
Der AxonHook wurde von den Anwendern als wichtige zusätzliche Prothesenkomponente neben der Michelangelo-Hand bewertet, die hauptsächlich für handwerkliche Alltagsaktivitäten eingesetzt wird. Mit den ersten Erfahrungen im Feld konnte eine hohe Anwenderzufriedenheit in Bezug auf die Eigenschaften und die Griffkraft des neuen Greifers festgestellt werden.
Für die Autoren:
Nadine Wismer, M. Sc.
Ottobock Healthcare Products GmbH
Brehmstraße 16
A‑1110 Wien
nadine.wismer@ottobock.com
Begutachteter Beitrag/reviewed paper
Wismer N, Ledinger Ch, Wehrle M. Funktionsweise und erste Resultate zur Anwendung und Zufriedenheit mit einem neuen myoelektrischen Greifer. Orthopädie Technik. 2017; 67 (5): 28–31
| Gewicht | 400 g (inkl. Handgelenk) |
|---|---|
| Griffkraft an den Spitzen | 110 N ± 15 N |
| Geschwindigkeit | 173 mm/s |
| Öffnungsweite | 130 mm |


- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Weir RF. Design of artificial arms and hands for prosthetic applications. In: Kutz M (ed.). Standard handbook of biomedical engineering and design. New York: McGraw-Hill, 2003: 32.1–32.61
- Heckathorne CW. Upper-limb prosthetics: components for adult externally powered systems. In: Bowker JH, Michael JW (eds). Atlas of limb prosthetics: surgical, prosthetic, and rehabilitation principles. 2nd edition. St. Louis: Mosby-Year Book, 1992: 151–173
- Belter JT, Segil JL, Dollar AM, Weir RF. Mechanical design and performance specifications of anthropomorphic prosthetic hands: a review. Journal of Rehabilitation Research & Development, 2013; 50 (5): 599–618.
- Pröbsting E, Kannenberg A, Conyers DW, Cutti AG, Miguelez JM, Ryan TA, Shonhowd TP. Ease of Activities of Daily Living with Conventional and Multigrip Myoelectric Hands. Journal of Prosthetics & Orthotics, 2015; 27 (2): 46–52
- Bertels T, Schmalz T, Ludwigs E. Objectifying the Functional Advantages of Prosthetic Wrist Flexion. Journal of Prosthetics & Orthotics, 2009; 21 (2): 74–78

