Einleitung
Durch die Versorgung mit modernen Beinprothesen können Amputierte heute ihren Alltag komfortabel und selbstständig bewältigen und ein hohes Maß an Mobilität zurückgewinnen. Mikroprozessorgesteuerte Prothesensysteme erkennen typische Bewegungsmuster, aber auch kritische Situationen, und passen die Funktion der Prothese in Echtzeit an die äußeren Gegebenheiten an. Damit der volle Funktionsumfang der Gelenksysteme genutzt werden kann, müssen beim Aufbau der Prothese die individuellen Eigenschaften jedes Patienten berücksichtigt werden 1.
Für die Überprüfung des statischen Aufbaus einer Beinprothese sind seit mehr als 15 Jahren geeignete Messmethoden verfügbar 2. Die Dynamik des Ganges wird in der Prothetik bislang überwiegend visuell überprüft. Dies kann jedoch nur qualitative Aussagen liefern; einige relevante Aspekte wie der Grad der Belastung beim Gehen entziehen sich vollkommen der visuellen Beurteilung. Der Einsatz komplexer stationärer Ganglaborsysteme ist im Versorgungsalltag nicht möglich, da ihre Nutzung zeitaufwendig und die technische Ausstattung teuer ist. Jedoch gewinnen Inertialsensoren zur Erfassung der Gangkinematik zunehmend an Bedeutung 3 und sind damit eine kostengünstige, technisch einfache Alternative zu den üblichen kamerabasierten Messsystemen.
In einem Forschungsprojekt der Technischen Universität Berlin wurden deshalb Inertialsensoren mit einem Kraft- und Momentensensor für Exoprothesen kombiniert, um ein mobiles Ganganalysesystem zu entwickeln. Es soll den Orthopädie-Techniker mit objektiven Messwerten bei seiner Arbeit am Patienten unterstützen. Das Messsystem verknüpft dazu Bewegungs- und Belastungsdaten und verarbeitet sie in einer eigens entwickelten Expertensoftware. Die Qualität der prothetischen Versorgung kann so unter realen Bedingungen untersucht und bewertet werden.
Im Versorgungsalltag ist die Auswertung und Interpretation umfassender biomechanischer Messdaten allein aus zeitlichen Gründen nur schwer möglich. Das mobile Ganganalysesystem muss deshalb nicht nur eine weitgehend automatisierte Auswertung der Daten bieten, es soll basierend auf den Ergebnissen auch konkrete Änderungen am Prothesenaufbau vorschlagen können. Um dieses Ziel zu erreichen, wurden die Auswirkungen verschiedener Variationen im Prothesenaufbau in Probandenstudien untersucht. Zunächst wurde der Fokus auf häufig angepasste Freiheitsgrade einer Transfemoralprothese gelegt: die Verschiebung der Kniegelenksachse in anteriorer und posteriorer Richtung sowie die Plantarflexion und Dorsalextension des Prothesenfußes.
Dabei ergaben sich zwei zentrale Herausforderungen: Zum einen müssen die individuellen Voraussetzungen jedes Patienten berücksichtigt werden, da sie einen limitierenden Faktor für einen harmonischen Bewegungsablauf darstellen können. Zum anderen muss das sich daraus ergebende stark individuelle Gangbild jedes Patienten bei der Auswertung der Messdaten beachtet werden. Die Definition allgemeingültiger Zielbereiche für biomechanische Parameter wie der Gangsymmetrie führt deshalb nicht zum gewünschten Erfolg. Dass vor diesem Hintergrund eine messtechnikbasierte Optimierung des Prothesenaufbaus möglich und sinnvoll ist, soll anhand der Ergebnisse der im Folgenden vorgestellten Studie erläutert werden.
Material und Methode
Das mobile Ganganalysesystem besteht aus einem Kraft- und Momentensensor 4 (siehe die Herstellernachweise am Schluss des Artikels) zum temporären Einbau in Prothesen 5 und acht drahtlosen Inertialsensoren 6, die mit Gurten am Körper des Probanden befestigt werden (Abb. 1). Das System erfasst damit die auf die Prothese wirkenden Kräfte und Momente in allen Raumrichtungen sowie die Bewegungen der Körpersegmente Fuß links/rechts, Unterschenkel links/rechts, Oberschenkel links/rechts, Becken und Oberkörper mit je einem drahtlosen Inertialsensor. Zu Validierungszwecken wurden die Messungen in einem Ganglabor mit einer instrumentierten Laufbahn durchgeführt. Die Erfassung der Kinematik der Körpersegmente erfolgte dabei mit einem optischen Ganganalysesystem (8 Kameras Vicon MX-20/MX-40 7). Die kinetischen Daten wurden mit zwei im Boden eingelassenen Kraftmessplatten (AMTI BP400600 8) bestimmt.
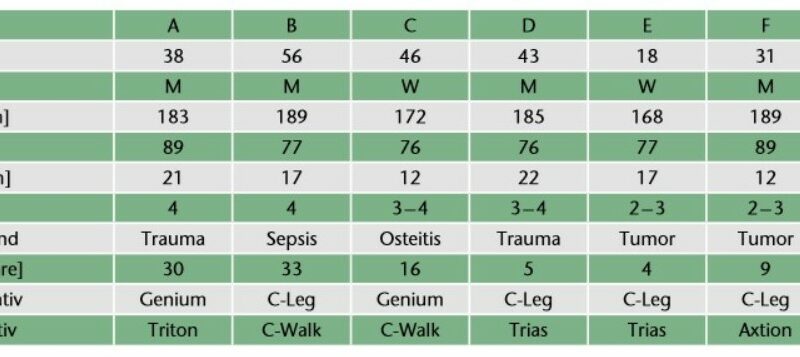
Sieben Probanden entsprachen den Einschlusskriterien und nahmen an der Studie teil. Die Fähigkeit zum sicheren Gehen ohne Gehhilfen und das Vorhandensein des notwendigen Bauraums in der Prothese zum Einbau von Verschiebeadaptern und Kraft- und Momentensensor sind als Kriterien hervorzuheben. Für die Messungen nutzten die Probanden das Kniegelenk C‑Leg 9 in Kombination mit dem gewohnten Prothesenfuß (Tab. 1) und dem gewohnten Schaft in sitzbeinumgreifendem Design. Alle Probanden hatten Erfahrungen mit dieser Passteilkombination aus früheren Versorgungen, wodurch eine kurze Eingewöhnungszeit realisiert werden konnte.
Das Messprotokoll sah zunächst eine Vermessung des gewohnten Prothesenaufbaus durch einen Orthopädie-Techniker mit Hilfe des LASAR Assembly 10 vor. Daraufhin wurden Verschiebeadapter sowie der Kraft- und Momentensensor in die Prothese eingebaut und die Statik des gewohnten Aufbaus wiederhergestellt. Danach erfolgte eine weitere Vermessung des Aufbaus mit dem LASAR Posture 11. Anschließend absolvierten die Probanden im Ganglabor 8 bis 10 Wiederholungen (Trials) des Gehens in der Ebene mit selbstgewählter Geschwindigkeit.
Nach der Dokumentation des gewohnten Aufbaus wurden die Messungen zu Aufbauvariationen durchgeführt. Dazu erstellte der Orthopädie-Techniker zunächst den Prothesenaufbau nach Herstellerangaben (Bench Alignment), um eine vergleichbare Basis für die Variationen zu schaffen. Nach der Vermessung auf LASAR Assembly und LASAR Posture erfolgte gegebenenfalls eine Korrektur der Plantarflexion zur Gewährleistung einer ausreichenden Standsicherheit und abschließend die Messung im Ganglabor. Ausgehend vom Bench Alignment wurde sodann die Lage der Knieachse mit Hilfe eines Verschiebeadapters (siehe Abb. 1) in anteriorer und posteriorer Richtung verändert und die Messung in der gleichen Weise durchgeführt. Der Wert der Verschiebung orientierte sich an der Empfindung des Probanden und der Einschätzung des Orthopädie-Technikers. So sollte ein Unterschied im Aufbau spürbar, jedoch ein sicherer Gang weiterhin möglich sein. Die Verschiebung erfolgte symmetrisch in beide Richtungen und lag im Bereich von 5 bis 12 mm. Die ursprüngliche Position des Schaftes in der Sagittalebene blieb dabei erhalten. Die Position des Prothesenfußes wurde über eine Verkippung am Pyramidenadapter des Kniegelenks wiederhergestellt. Die sich daraus ergebende Veränderung der Plantarflexion des Prothesenfußes wurde ausgeglichen, da genauso wie beim Bench Alignment die Standsicherheit mit Hilfe des LASAR Posture hergestellt wurde. Die untersuchte Aufbauvariation stellt also eine Kombination aus Knieachsenverschiebung und Änderung der Plantarflexion/-extension des Prothesenfußes dar. In einer zweiten, noch laufenden Probandenstudie werden ergänzend Knieachsenverschiebung und Plantarflexion/-extension getrennt untersucht.
Eine eigens entwickelte Ganganalysesoftware verarbeitet die aufgezeichneten Messdaten. Aus den Belastungen lassen sich dort unter anderem Schnittlasten in den einzelnen Gelenken sowie in den Boden eingeleitete Lasten berechnen. Aus den aufgenommenen Bewegungen bestimmt die Software zum Beispiel die Gelenkwinkel der unteren Extremitäten oder die Neigung des Oberkörpers. Dabei werden Hüft‑, Knie- und Sprunggelenke als Scharnier- oder Kugelgelenke approximiert 12. Die Verknüpfung von Belastungen und Bewegungen erlaubt darüber hinaus Aussagen über den Energieumsatz beim Gehen und die Dämpfung im Kniegelenk.
Mit Hilfe der automatischen Schrittdetektion werden die Datenströme in einzelne Schritte unterteilt. Dazu werden die Inertialsensoren an den Füßen genutzt, was die weitere Segmentierung in einzelne Gangphasen ermöglicht und die Berechnung von Zeit-Distanz-Parametern erlaubt 13. Ein automatischer Filter eliminiert Abbrems- und Beschleunigungsvorgänge anhand von Ähnlichkeiten zwischen den aufgenommen Kurven aus dem Datensatz. Die übrigen Kurven einzelner Schritte werden genutzt, um weitere biomechanische Parameter zu extrahieren. Hier sind beispielhaft der Wert der Belastung beim Auftreten und Abstoßen oder das notwendige Hüftmoment zum Einleiten der Schwungphase zu nennen. Ein Dynamic-Time-Warping-Algorithmus 14 fasst die Kurven zusammen. Die resultierenden mittleren Kurven weisen generell eine geringe Streubreite bei dennoch starken individuellen Charakteristika auf.
Während die mittleren Kurven in erster Linie der Veranschaulichung der Messdaten dienen, werden die biomechanischen Parameter statistisch weiterverarbeitet. Neben linearen Regressionsanalysen erfolgen Hypothesentests bei einem Signifikanzniveau von 5 % mit Kolmogorov-Smirnov-Tests sowie mehrfaktoriellen Varianzanalysen (ANOVA) und Post-hoc-Tests mit Bonferroni-Korrektur 15. Weiterhin werden Methoden des maschinellen Lernens genutzt, um die Aufbauvariationen automatisch zu klassifizieren.
Ergebnisse
Validierung des Messsystems
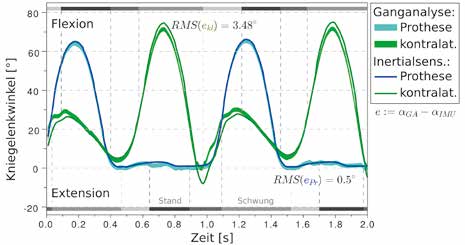
Um das mobile Ganganalysesystem zu validieren, wurde zunächst ein exemplarischer Vergleich mit den stationären Messsystemen des Ganglabors angestellt. Für den Vergleich der Kinematik wurden die Kniewinkel genutzt. Die Abweichung („root mean square error“) zwischen beiden Systemen lag für die prothetisch versorgte Seite im Mittel bei 0,7° und für die kontralaterale Seite bei 3,3° 16. Der mit dem mobilen Ganganalysesystem bestimmte Kniewinkel zeigt also eine gute Übereinstimmung mit den im Ganglabor gemessenen Werten (Abb. 2). Die bessere Übereinstimmung auf der prothetisch versorgten Seite lässt sich durch das Fehlen von Weichteilbewegungen an Ober- und Unterschenkelsegment erklären. Besonders in Bereichen großer Dynamik sind auf der kontralateralen Seite sowohl Inertialsensoren als auch die am Bein aufgeklebten Marker des optischen Ganganalysesystems durch die Weichteilbewegungen gestört. Weiterhin kann die komplexe Mechanik des physiologischen Kniegelenks nicht hinreichend genau durch das implementierte einachsige Gelenkmodell abgebildet werden.
Die kinetischen Messdaten zeigen ebenfalls gute Übereinstimmungen. Bei den mehr als 70 verglichenen Trials konnte für die Vertikalkraft die geringste relative Abweichung („root mean square error“ bezogen auf das Betragsmaximum) von unter 2 % erzielt werden. Für die anderen Komponenten lag die Abweichung im Bereich von 3 bis 5 %. Die Fehler sind nicht nur auf Differenzen zwischen den Kraftmessplatten und dem mobilen Belastungssensor zurückzuführen. Sie sind auch dadurch begründet, dass zur Berechnung der Kräfte und Momente die Ausrichtung und Lage der Prothese im Raum genau bekannt sein muss. Die Fehler des kinematischen Messsystems pflanzen sich also auf der kinetischen Seite fort.
Sensitivität des Verfahrens
Im stationären Ganglabor wird bei jedem Trial üblicherweise ein Doppelschritt aufgenommen. Unerwünschte Beschleunigungs- und Abbremsvorgänge werden nicht erfasst, da sie außerhalb des relativ kleinen Messvolumens stattfinden. Verfehlt der Proband bei einem Trial die verdeckt montierten Kraftmessplatten im Boden, muss er ihn wiederholen. Durch die kontinuierliche Aufzeichnung der Messdaten im mobilen Ganganalysesystem werden von vornherein mehr Schritte erfasst. Weiterhin lassen sich durch den automatischen Schrittfilter unerwünschte Bewegungen spezifisch aus den Daten entfernen. Bei gleicher zurückgelegter Wegstrecke steht also eine größere Anzahl an Schritten für die statistische Auswertung zur Verfügung. Im Umkehrschluss kann mit dem mobilen Ganganalysesystem eine Verringerung der Probandenbelastung bei gleichbleibender Aussagekraft der Untersuchung erreicht werden.
Knieachsenverschiebung und Standphasendauer
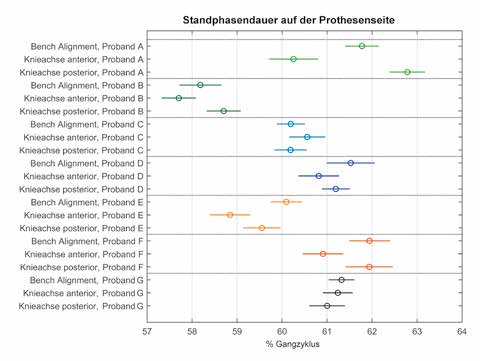
Um die verschiedenen Variationen im Prothesenaufbau bewerten zu können, wurde in einem ersten Schritt die Gangsymmetrie als Kriterium herangezogen. Prothesenträger zeigen stets eine verkürzte Standphasendauer auf der amputierten Seite, was sich auf die trotz Prothese verringerten sensorischen und motorischen Fähigkeiten zurückführen lässt 17 18. Es wurde also geprüft, ob die vorgenommenen Änderungen im Prothesenaufbau zu einer Verlängerung der Standphasendauer und damit zu einer Verringerung der Asymmetrie im Gangbild führen können (Abb. 3).
Bei den Probanden A, B, E und F waren signifikante Unterschiede (p < 0,001) zwischen einzelnen Aufbauten feststellbar (die Vertrauensintervalle in Abbildung 3 überlappen nicht). Dabei wird die Tendenz deutlich, dass ein Aufbau mit geringerer Standphasensicherheit, wie der Knieachsenverschiebung nach anterior, zu einer kürzeren Standphasendauer führt. Dies trifft jedoch nicht auf alle Probanden zu und lässt sich deshalb nicht verallgemeinern. Außerdem sind die interindividuellen Unterschiede weit größer als die durch Aufbauvariationen hervorgerufenen Differenzen. Jedoch ist auch hier keine Verallgemeinerung möglich, was an der signifikanten Interaktion (p < 0,001) zwischen Aufbau und Proband deutlich wird. Es müssen also weitere Kriterien herangezogen werden, um den Prothesenaufbau zu bewerten.
Sagittalmomente und Kompensationsbewegungen
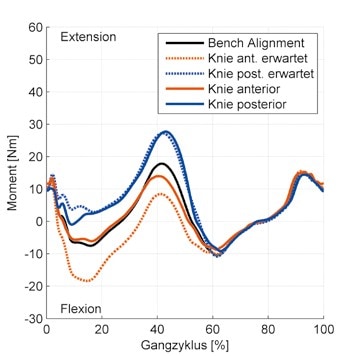
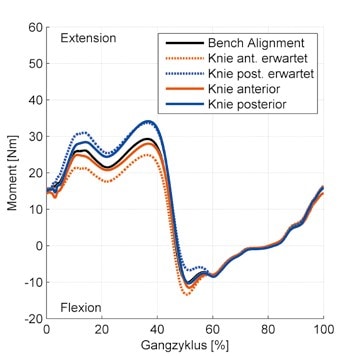
Der Verlauf des Sagittalmoments im Kniegelenk zeigt die Standphasensicherheit direkt an, da nur bei negativen Momenten auch eine Flexion der Prothese zu erwarten ist, wie in Abbildung 4 ersichtlich. Dort sind die gemessenen mittleren Sagittalmomentenkurven für das Bench Alignment, die Knieverschiebung nach anterior und nach posterior exemplarischfür einen Patienten aufgeführt. Weiterhin wurde eine Vorhersage der Messdaten der beiden Aufbauvariationen versucht, indem die Daten des Bench Alignment mit dem zusätzlichen Hebelarm beaufschlagt wurden, der sich aus der Knieachsenverschiebung ergibt (gepunktete Linien in Abbildung 4). Für die Knieverschiebungnach posterior ergibt sich eine gute Übereinstimmung zwischen Vorhersage und tatsächlichen Messdaten. Für die Knieachsenverschiebung nach anterior weichen die gemessenen Werte in der Standphase dagegen stark von der Vorhersage ab. Diese postuliert Beugemomente von bis zu −18 Nm, die eine starke Standphasenflexion erzeugen würden. Wenn der Proband sein Gangbild nun unverändert ließe, könnte die am Ende der Standphase notwendige Kniestreckung nicht vollständig erfolgen. Dies würde das Abstoßen erschweren. Deshalb verhindert der Proband schon zu Beginn der Standphase eine übermäßige Flexion des Kniegelenks. Dies geschieht wahrscheinlich durch eine aktive Bewegung im Stumpf und eine Änderung der Oberkörperhaltung, die die Lage des Körperschwerpunkts beeinflusst.
Erstaunlicherweise kann dieser Mechanismus auch dann beobachtet werden, wenn keine Standphasenbeugung auftritt, wie für Proband G in Abbildung 5 gezeigt. Dort werden deutliche Streckmomente um 20 Nm bei der Knieverschiebung nach anterior postuliert. Die gemessenen Daten zeigen jedoch noch höhere Streckmomente von bis zu 25 Nm zu Beginn der Standphase. Es scheint, als hätte der Proband ein hohes individuelles Sicherheitsbedürfnis, das sich nicht an der tatsächlichen Knieflexion orientiert, sondern bereits das Sagittalmoment betrifft. Demnach wird schon eine stärkere Beugungsneigung des Kniegelenks vom Probanden kompensiert.
Einleitung der Schwungphase und Energieverbrauch
Um das individuelle Sicherheitsbedürfnis eines Patienten nicht zu verletzen, wäre es demnach zweckmäßig, den Prothesenaufbau so zu gestalten, dass die Kniegelenkachse tendenziell nach posterior verlagert wird. Dies ist jedoch aus mindestens zwei Gründen problematisch: Wenn der Proband eine Standphasenbeugung ausführt, kann eine posteriore Verschiebung der Kniegelenkachse zu einer Verringerung oder kompletten Unterdrückung der Beugung führen. Der Nutzen der Standphasenbeugung für Oberschenkelamputierte wird kontrovers diskutiert. Es kann jedoch festgehalten werden, dass beim Gang mit Standphasenflexion ein schnellerer vollflächiger Bodenkontakt des Fußes hergestellt werden kann und das Gangbild dem physiologischen Vorbild näherkommt 19. Zum Ende der Standphase wird die Schwungphase eingeleitet, und das Knie beginnt zu beugen. Dazu müssen die Streckmomente durch eine aktive Bewegung des Stumpfes überwunden werden. Sie erreichen um 40 % Gangzyklus ihr Maximum. Hohe Streckmomente konnten in anderen Untersuchungen mit einem erhöhten metabolischen Energieverbrauch in Zusammenhang gebracht werden 20.
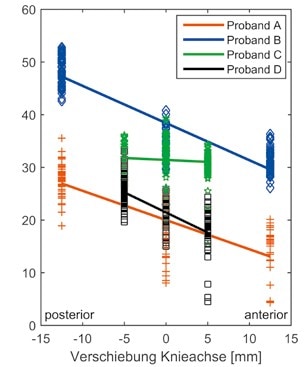
Die Ergebnisse der durchgeführten Studie zeigen signifikante Unterschiede zwischen den Prothesenaufbauten für das Sagittalmomentenmaximum (p < 0,001), das die zu überwindenden Streckmomente markiert. Jedoch waren auch hier die interindividuellen Unterschiede erheblich, und wiederum wurden signifikante Interaktionseffekte manifest (p < 0,001). Deshalb wurde eine lineare Regressionsanalyse für jeden einzelnen Probanden durchgeführt (Auszug siehe Abbildung 6). Für einzelne Probanden besteht eine gute Korrelation zwischen Sagittalmomentenmaximum und Knieachsenverschiebung (Bestimmtheitsmaß R² > 0,7 für Proband A, B sowie 0,7 > R² > 0,3 für die Probanden D, E, F). Für diese Probanden kann also bestätigt werden, dass sich eine Verlagerung der Knieachse nach posterior ungünstig auf die Höhe der Streckmomente und damit auf die Einleitung der Schwungphase auswirkt.
Automatische Klassifizierung des Prothesenaufbaus
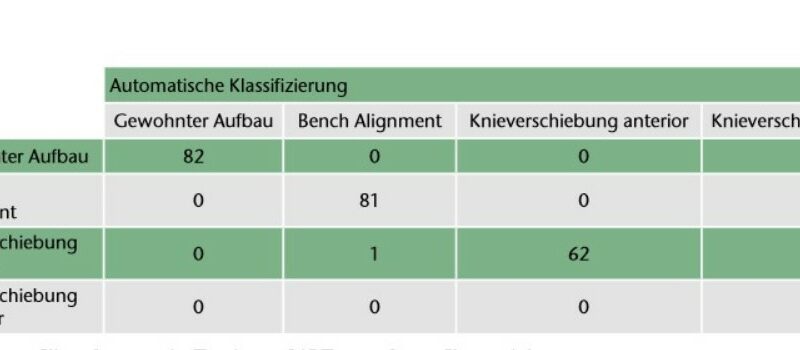
Aufgrund der großen interindividuellen Unterschiede konnten bisher keine allgemeingültigen Aussagen zur Prothesenaufbauoptimierung getroffen werden. Um dennoch dem Ziel der vollständig automatisierten Messdatenauswertung und sukzessive einem Vorschlag zur Aufbauoptimierung näher zu kommen, wurden Methoden des maschinellen Lernens angewandt. Zunächst sollten die aufgenommenen Schritte anhand der Messdaten automatisch klassifiziert und einer der Aufbauvariationen zugeordnet werden. Dazu erfolgt eine Unterteilung aller aufgenommenen Schritte in Testdaten (20 %) und Trainingsdaten (80 %). Mit Letzteren wird ein CART-Algorithmus („classification and regression tree“, „bootstrap aggregating“) trainiert, die Klassifizierung anhand 34 ausgewählter biomechanischer Parameter vorzunehmen. Danach werden die zu den Testdaten gehörenden Schritte vom Algorithmus den einzelnen Aufbauvariationen zugeordnet. Zuletzt wird geprüft, ob die Zuordnung der Testdaten zutreffend war. Eine besondere Bedeutung kommt dabei der Auswahl des Trainingsdatensatzes zu. Bei Anwendung der stratifizierten Kreuzvalidierung, die eine vergleichbare Varianz in Test- und Trainingsdaten sicherstellt, konnte eine sehr hohe Genauigkeit bei der automatischen Zuordnung von 98 % erzielt werden. In Tabelle 2 ist die zugehörige Wahrheitsmatrix („confusion matrix“) dargestellt, die die Anzahl der automatisch einem Aufbau zugeordneten Schritte sowie die tatsächliche Klassenzugehörigkeit zeigt. Erfolgte die Einteilung in Test- und Trainingsdatensatz mit der Leave-one-out-Methode, bei der die Messdaten eines Probanden den Testdatensatz bilden, scheitert die automatische Zuordnung. Demnach kann die Expertensoftware bisher keine Aussagen für erstmalig mit dem System versorgte Probanden treffen.
Diskussion und Ausblick
Im Vergleich zwischen dem aktuellen Standard, der stationären kamerabasierten Ganganalyse, und dem mobilen Ganganalysesystem konnten gute Übereinstimmungen erzielt werden. Beim Kniegelenkwinkel gab es auf der kontralateralen Seite im Bereich größerer Dynamik allerdings größere Abweichungen zwischen den Systemen. Mit Hilfe geeigneter Filterverfahren soll der Einfluss der ursächlichen Weichteilbewegungen in Zukunft verringert werden. Erste exemplarische Tests zeigen, dass eine deutliche Verringerung der Abweichungen möglich ist. Beim Vergleich von Kräften und Momenten spielen die kinematischen Messfehler ebenfalls eine entscheidende Rolle. Jedoch sind trotz der methodisch bedingten Abweichungen zwischen den Systemen relative Aussagen zur Auswirkung von Aufbauvariationen möglich.
Die Ergebnisse der Studie zeigen, dass die Variation der Kniepolposition in der Sagittalebene die Gangsymmetrie beeinflusst. Dies trifft jedoch nicht auf alle Probanden zu. Die Ursache könnte in den individuellen Voraussetzungen des Probanden liegen, die die erreichbare Symmetrie im Gangbild beschränken. Dies wird auch bei der Bewertung der Sagittalmomente während der Standphase deutlich. Hier zeigte sich ein stark individuelles Sicherheitsbedürfnis jedes Probanden. Vermutlich spielen dabei aktive Kompensationsbewegungen im Oberkörper eine entscheidende Rolle. Diese Bewegungen wurden zwar erfasst, jedoch ist zunächst eine Weiterentwicklung der Auswertungsalgorithmen notwendig, um in Zukunft genaue Aussagen zu Kompensationsbewegungen treffen zu können.
Ein weiterer Fokus soll auf der Normierung der biomechanischen Parameter liegen, um trotz der großen interindividuellen Unterschiede eine automatische Auswertung der Messdaten zu ermöglichen. Einfache Methoden wie die Gewichts- oder Körpergrößennormierung brachten bisher keinen Erfolg. Lässt sich der Probandeneinfluss eliminieren, kann im letzten Schritt der Umkehrschluss zur automatischen Klassifizierung gezogen werden: Basierend auf den Messdaten soll die Expertensoftware eine Anpassung am Prothesenaufbau vorschlagen, die zu einer Verbesserung des Gangbilds führt. Dabei soll der Proband bisher nicht im System erfasst worden sein, und es sollen möglichst nur Daten eines Prothesenaufbaus aufgenommen werden. Nach Abschluss der laufenden zweiten Probandenstudie wird dieses Ziel in den Fokus rücken. Dennoch bleibt auch danach ein erheblicher Forschungsbedarf bestehen, da bisher nur ein kleiner Teil der denkbaren Variationen am Prothesenaufbau untersucht wurde. Außerdem sollte in Zukunft ein größeres Probandenkollektiv betrachtet werden, um die Allgemeingültigkeit der ermittelten Zusammenhänge weiter abzusichern.
Das mobile Ganganalysesystem eignet sich bisher nur bedingt für die alltägliche Patientenversorgung. So ist die Expertensoftware noch nicht anwenderfreundlich und der Aufwand zum Einbau des Systems nicht unerheblich. Außerdem schließt die Bauhöhe des Kraft- und Momentensensors Patienten mit längeren Stümpfen oder Knieexartikulationen aus der Betrachtung aus. Deshalb werden verschiedene Optimierungsansätze verfolgt. So soll die Nutzeroberfläche der Software neu gestaltet und die Echtzeitfähigkeit des Systems weiter verbessert werden, um dem Orthopädie-Techniker eine direkte Rückmeldung zum Gangbild geben zu können. Weiterhin werden einzelne Komponenten des mobilen Ganganalysesystems in einem Gehäuse zusammengefasst, um den Aufwand beim Einbau in die Prothese zu verringern. Die Bauhöhe des Systems ist für die Patientenversorgung weniger problematisch, da dort meist auf einen Verschiebeadapter verzichtet werden kann und der Grundkörper des Kraft- und Momentensensors eine weit geringere Systemhöhe aufweist.
Trotz der erwähnten Limitationen und Optimierungspotenziale ist das mobile Ganganalysesystem eine vielversprechende Möglichkeit zur Unterstützung einer qualitätsorientierten prothetischen Versorgung. Dabei bietet die Bewertung der Prothesendynamik anhand objektiver Messwerte einen erheblichen Mehrwert. Denn durch das Gangsehen kann die Ursache individueller Probleme im Gangbild häufig nur schwer identifiziert werden. Bisher muss sich jeder Patient allein auf die Erfahrung seines Orthopädie-Technikers verlassen. Das mobile Ganganalysesystem könnte aber auch dazu beitragen, diese so wichtige Fähigkeit besser zu schulen. Deshalb ist eine Fortsetzung der Forschung zur Optimierung des Gangbildes transfemoral Amputierter in den nächsten Jahren geplant.
Für die Autoren:
Dipl.-Ing. Julius Thiele
Technische Universität Berlin
Fachgebiet Medizintechnik
Dovestr. 6
10587 Berlin
julius.thiele@tu-berlin.de
Begutachteter Beitrag/reviewed paper
Thiele J, Westebbe B, Seel T, Oehler S, Welke B, Seehaus F, Kraft M. Erste Schritte zur Optimierung des Aufbaus von Transfemoralprothesen mit einem mobilen Ganganalysesystem. Orthopädie Technik, 2015; 66 (6): 38–44

- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Schmalz T, Blumentritt S, Jarasch R. Energy expenditure and biomechanical characteristics of lower limb amputee gait: the influence of prosthetic alignment and different prosthetic components. Gait & Posture, 2002; 16 (3): 255–263
- Blumentritt S. A new biomechanical method for determination of static prosthetic alignment. Prosthet Orthot Int, 2002; 21(2): 107–113
- Negaard N, Andres S, Kauert R, Schauer T, Raisch J. Gait phases detection and step length estimation of gait by means of inertial sensors. 3rd European Medical & Biological Engineering Conference, Prag, Czech Republic, 2005
- Hersteller: Otto Bock HealthCare GmbH, Max-Näder-Str. 15, 37115 Duderstadt, Germany
- Oehler S, Kraft M, Pusch M. Mobilitäts- und Belastungsmessungen an Oberschenkelamputierten. Ergebnisse einer einjährigen Studie. Biomedizinische Technik/Biomedical Engineering, 2010; 55 (S1): 63–66
- Hersteller: Xsens Technologies B. V., P. O. Box 559, 7500 AN Enschede, The Netherlands
- Hersteller: Vicon Motion Systems Ltd, 14 Minns Business Park, West Way, Oxford OX2 OJB, UK
- Hersteller: AMTI, 176 Waltham Street, Watertown, MA 02472, USA
- Hersteller: Otto Bock HealthCare GmbH, Max-Näder-Str. 15, 37115 Duderstadt, Germany
- Hersteller: Otto Bock HealthCare GmbH, Max-Näder-Str. 15, 37115 Duderstadt, Germany
- Hersteller: Otto Bock HealthCare GmbH, Max-Näder-Str. 15, 37115 Duderstadt, Germany
- Seel T, Raisch J, Schauer T. IMU-based joint angle measurement for gait analysis. Sensors, 2014; 14 (4): 6891–6909
- Seel T, Raisch J, Schauer T. IMU-based joint angle measurement for gait analysis. Sensors, 2014; 14 (4): 6891–6909
- Bender A, Bergmann G. Determination of typical patterns from strongly varying signals. Comput Methods Biomech Biomed Engin, 2012; 15 (7): 761–769
- Hochberg Y, Tamhane AC. Multiple comparison procedures. New York, NY: Wiley, 1987
- Seel T, Raisch J, Schauer T. IMU-based joint angle measurement for gait analysis. Sensors, 2014; 14 (4): 6891–6909
- Nolan L, Wit A, Dudziñski K, Lees A, Lake M, Wychowañski M. Adjustments in gait symmetry with walking speed in trans-femoral and trans-tibial amputees. Gait & Posture, 2003; 17 (2): 142
- Schaarschmidt M, Lipfert SW, Meier-Gratz C, Scholle H, Seyfarth A. Functional gait asymmetry of unilateral transfemoral amputees. Human Movement Science, 2012; 31 (4): 907–917
- Blumentritt S, Scherer HW, Wellershaus U, Michael JW. Design Principles, Biomechanical Data and Clinical Experience with a Polycentric Knee Offering Controlled Stance Phase Knee Flexion: A Preliminary Report. Journal of Prosthetics and Orthotics, 1997; 9 (1): 18–24
- Schmalz T, Blumentritt S, Jarasch R. Energy expenditure and biomechanical characteristics of lower limb amputee gait: the influence of prosthetic alignment and different prosthetic components. Gait & Posture, 2002; 16 (3): 255–263
