Einleitung
Die Entwicklung der letzten Jahre verzeichnet einen rasanten Anstieg der Zahl vorgestellter künstlicher Hände, die in zunehmendem Maße auch in der Prothetik Anwendung finden. Typischerweise werden diese Prothesen durch elektrische Motoren angetrieben und produzieren hohe Kräfte und hohe Verstellgeschwindigkeiten 1. Nennenswerte Beispiele sind die iLimbHand 2 von Touch Bionics, im Jahre 2007 vorgestellt, die Bebionic-Hand 3 von Steeper (2011) und die Michelangelo-Hand 4 von Otto Bock (2012). Ein weiteres interessantes Konzept ist die Hackberry-Hand von Exiii 5, die per 3‑D-Druck und Open-Source-Ansatz die Kosten solcher Hände drastisch zu verringern sucht. Allerdings ist die Anwenderzufriedenheit mit diesen per elektrischem Motor angetriebenen Händen noch steigerungsfähig; bemängelt werden u. a. die hohe Steifigkeit dieser Hände, hohes Gewicht, Geräuschentwicklung sowie die unnatürliche, roboterhafte Haptik 6.
Aus diesen Gründen sucht die Forschung verstärkt nach alternativen Antrieben. Eine dieser Alternativen ist die Verwendung von Formgedächtnislegierungen (FGL). Aktoren aus Legierungen wie z. B. Nickel-Titan zeichnen sich durch die höchste Energiedichte aller bekannten Antriebsmechanismen aus 7 und lassen sich in Drahtform als „metallene Muskeln“ einsetzen. Verschiedene Ansätze mit solchen FGL-Drähten, die thermisch, etwa durch die Joule’sche Wärme eines elektrischen Stromes, aktiviert werden, sind bereits vorgestellt worden. Ein Design, das Nylonschnüre verwendet, die mit FGL-Drähten verbunden sind, wurde in mehreren Studien 8 9 10 vorgestellt. Hier sind FGL-Drähte im Armbereich untergebracht, was allerdings den notwendigen Bauraum vergrößert. In einer weiteren Studie 11 wurde ein Ansatz vorgestellt, der die FGL-Drähte zum Beugen in den Fingern unterbringt; die Rückstellung erfolgt durch Federn.
Analysiert man die vorgestellten FGL-Ansätze, so stellen sich als Hauptnachteile die geringe erzielte Kraft an der Fingerspitze und die durch das langsame Abkühlen der Drähte bedingte geringe Geschwindigkeit heraus 12. Darüber hinaus werden zum Messen der Fingerwinkelbewegung zusätzliche Sensoren verwendet, was das Gewicht der Hände wiederum erhöht.
Im Rahmen dieser Arbeit wird ein neuartiges Konzept für eine FGL-angetriebene 3‑Finger-Hand vorgestellt, das durch Bündelung mehrerer dünner Drähte (Durchmesser 100 μm) die Kraft in gewissen Bereichen beliebig skalieren kann, während der geringe Drahtdurchmesser das für hohe Abkühlraten erforderliche große Oberflächen-Volumen-Verhältnis bewahrt. Zusätzlich wird gezeigt, dass durch Messung des elektrischen Widerstands während der Aktuierung ein intrinsischer Sensoreffekt genutzt werden kann, der gestattet, die Position des Fingers ohne externe Sensoren zu ermitteln.
FGL als Aktoren und Sensoren
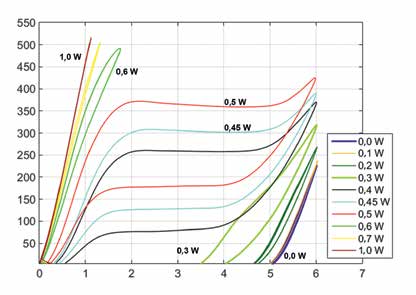
Formgedächtnislegierungen wie beispielsweise Nickel-Titan (NiTi) ermöglichen, speziell mit Aktoren in Drahtform, die Erzeugung größter Kräfte bei für Metalle außergewöhnlichen Längenänderungen von bis zu 4 %. Beispielsweise ist ein NiTi-Draht mit dem Durchmesser eines Haares (100 µm) in der Lage, infolge elektrischer Heizung Kräfte von etwa 2 N zu generieren. Das typische Spannungs-Dehnungs-Verhalten eines solchen Drahtes bei Aktivierung mit unterschiedlichen elektrischen Leistungen ist Abbildung 1 oben zu entnehmen.
Besonders interessant sind diese Materialien, weil sie neben dem hohen Arbeitsvermögen gleichzeitig sensorische Fähigkeiten besitzen. In Abbildung 1 unten erkennt man, dass sich trotz des stark hysteresebehafteten mechanischen Verhaltens eine eindeutige Beziehung zwischen elektrischem Widerstand und Längenänderung erkennen lässt und sich Letztere somit elektrisch ohne weitere Sensorik leicht bestimmen lässt. Dieses auch als „selfsensing“ bezeichnete Verhalten macht FGL-Drähte zu extrem vielseitigen, multifunktionalen Werkstoffen, die in Zusammenhang mit einer künstlichen Hand also nicht nur als künstliche Muskeln eingesetzt werden können, sondern zugleich auch als Nerven.
Bioinspiriertes Design
Neben ihren vielseitigen aktorischen und sensorischen Eigenschaften ermöglichen FG-Aktoren insbesondere den Aufbau künstlicher Hände, die ohne Antriebe auskommen, wie sie üblicherweise aus dem Maschinenbau bekannt sind. Dazu zählen elektrische Motoren, die bei entsprechender Kraftentwicklung schnell groß und schwergewichtig werden, oder pneumatische Antriebe, die komprimierte Luft mit entsprechenden Druckniveaus erfordern, was beides bei mobilen Lösungen nicht wünschenswert ist.
Demgegenüber lassen sich mit FG-Aktordrähten extrem leichtgewichtige und flexibel verlegbare, platzsparende Lösungen entwerfen, die sich zudem an Muskel- und Bänderkonzepten orientieren können, die die Natur in vielen Millionen Jahren erfolgreich optimiert hat.
In Verbindung mit modernen 3‑D-Druck-Technologien lassen sich somit erste Prototypen für Handprothesen herstellen, die durch Verwendung von Muskel- und Nervendrähten dem menschlichen Vorbild immer näher kommen. Der in dieser Arbeit dokumentierte Prototyp ist der erste Ansatz eines solchen Konzepts und wurde erstmalig auf der Hannovermesse 2015 vorgestellt.
Fingeraufbau
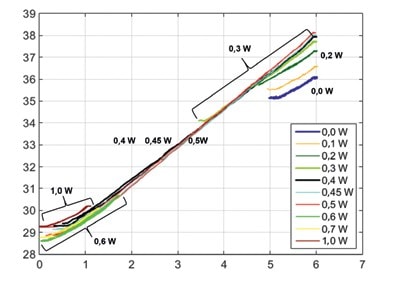
Der Aufbau einer flexiblen und kraftvollen Hand beginnt mit dem Finger. Abbildung 2 zeigt Ober- und Unterseite eines solchen FG-angetriebenen Fingers als CAD-Modell (außen) sowie als Muskelkonzept (innen). In der Abbildung erkennt man die Anordnung mehrerer NiTi-Drähte des Typs Flexinol® (Dynalloy, Inc., Tustin, CA) 13, die als Beuger- und Streckermuskeln fungieren. Der gelbe Draht wird zur Krafterhöhung mehrfach zwischen „Handfläche“ und vorderstem Fingerglied gewickelt, während der blaue Draht den Antrieb des zweiten Fingerglieds ermöglicht. Beide befinden sich auf der Handunterseite und dienen zur Beugung des Fingers. Auf der Handoberseite befindet sich der in Abbildung 2 (innen links) dargestellte rote Draht, der die Streckerfunktion sowie – abwechselnd mit dem gelbblauen Drahtpaar – durch elektrische Beheizung und anschließende Abkühlung die Bewegung des Fingers übernimmt.
In Abbildung 3 ist im Foto ein per 3‑D-Druck realisierter Prototyp zu erkennen, der das obige Konzept durch geeignete Drahtführung ober- bzw. unterhalb der Gelenkdrehpunkte realisiert.
Handaufbau
Der erste Handprototyp, zu sehen in Abbildung 4, ist durch einen modularen Aufbau mit drei identischen Fingern realisiert, von denen einer als Daumen fungiert, während zwei als Zeige- und Mittelfinger ausgebildet sind. Abbildung 4 oben zeigt das CAD-Modell, während unten der 3‑D-gedruckte Prototyp zu sehen ist. Dabei lassen sich insbesondere mit multimaterialfähigen Druckern auch weiche Fingerkuppen aus Materialien mit geringer Shorehärte zur Verbesserung der Greiffähigkeit vorteilhaft einsetzen.
Ergebnisse
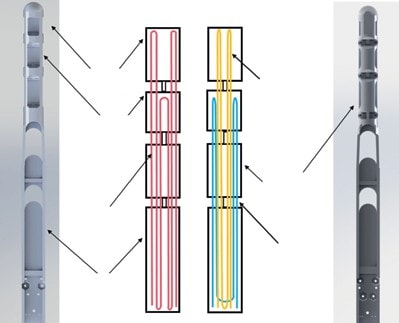
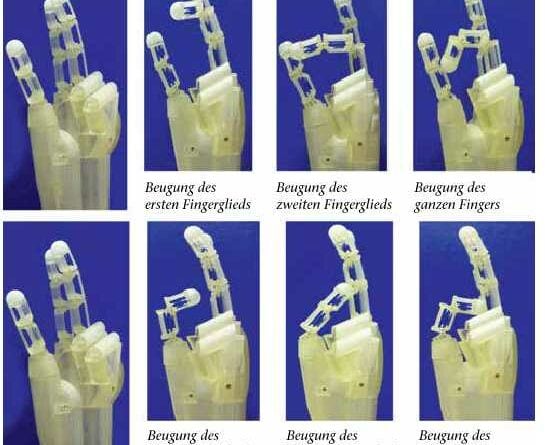
Ein Gefühl für die Beweglichkeit des Handprototyps vermittelt Abbildung 5 In der oberen Reihe ist die Aktuierung eines Fingers gezeigt, bei dem links der Strecker aktiviert ist und dann nach rechts zunächst das erste und dann das zweite Fingerglied aktiviert werden, um ganz rechts die gemeinsame Bewegung beider Fingerglieder zu zeigen. Die zweite Reihe illustriert auf analoge Art und Weise die Bewegung des Daumens. Ein Video des gezeigten Verhaltens ist z. B. unter 14 zu sehen.
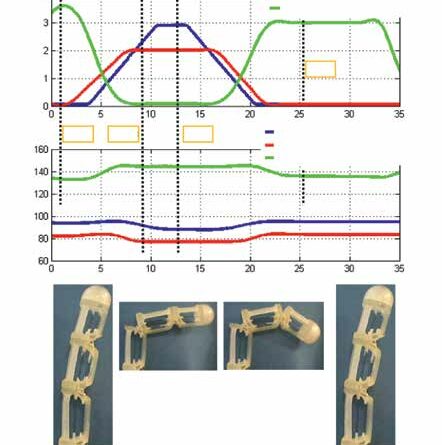
Während Abbildung 5 die „Muskeleigenschaften“ der verwendeten NiTi-Drähte demonstriert, liegt der Fokus in Abbildung 6 auf den sensorischen Eigenschaften. In der oberen Reihe der Abbildung ist das Steuersignal in Form des elektrischen Leistungsverlaufs zu erkennen, bei dem zunächst der antagonistische Strecker (grün) aktiviert wird, um danach von den beiden protagonistischen Beugemuskeln (rot und blau) abgelöst zu werden, um schließlich wieder in den geraden Zustand zurückzukehren. Die zugehörige Bewegungsfolge ist den Fotos in der unteren Reihe zu entnehmen, die zu den mit „Frame 1–4“ gekennzeichneten Zeitpunkten im Diagramm gehören.
Die sensorischen Eigenschaften erkennt man in dem entsprechenden elektrischen Widerstandssignal in der mittleren Reihe. Zunächst beobachtet man zusammen mit dem Anstieg der elektrischen Leistung einen Abfall des Widerstands im aktivierten Draht. Dies resultiert aus einer Phasentransformation im Draht, bei der die bei Raumtemperatur vorliegende Martensitphase in Austenit umgewandelt wird, die einen um bis zu 30 % geringeren Widerstand besitzt und damit den temperaturbedingten Anstieg mehr als kompensiert. Zusätzlich erkennt man bei Betrachtung der grünen Kurve, dass der Widerstand im Antagonisten im Zeitraum von 5 bis 25 Sekunden während der Aktivierung der beiden Beuger steigt. Dies resultiert aus der damit verbundenen Streckung dieses Drahtes, der im nunmehr abgekühlten Zustand auch diese Längenänderung als Widerstandssignal anzeigt. Anhand dieser Kurven lässt sich in Echtzeit die Kontraktion der einzelnen Muskeldrähte überwachen und die entsprechende Fingerbewegung ohne weitere Sensoren rekonstruieren.
Zusammenfassung
In dieser Arbeit wurde ein erster Prototyp einer 3‑D-gedruckten künstlichen Hand mit Aktordrähten aus der Formgedächtnislegierung Nickel-Titan vorgestellt. Diese Aktordrähte verfügen über eine extreme Energiedichte und lassen sich als durch elektrischen Stromfluss aktivierte „metallene Muskeln“ auf bionische Art und Weise in den Handprototyp integrieren. Durch ihr geringes Gewicht und ihre große Kraftentwicklung gestatten sie den Aufbau äußerst effizienter und vielseitiger Greifsysteme, die in Zukunft Prothesen mit deutlich höherem Tragekomfort zur Steigerung der Patientenlebensqualität ermöglichen. Zusätzlich fungieren die verwendeten NiTi-Drähte durch ein entsprechendes elektrisches Widerstandssignal zeitgleich auch als „Nerven“ und gestatten somit eine Information über die jeweils aktuelle Kontraktion der Muskeldrähte, was eine geregelte Ansteuerung ohne zusätzliche Positionssensoren ermöglicht.
Für die Autoren:
Prof. Dr.-Ing. Stefan Seelecke
Lehrstuhl für Intelligente Materialsysteme,
Universität des Saarlandes,
Zentrum für Mechatronik und Automatisierungstechnik
Gewerbepark Eschberger Weg, Geb. 9
66121 Saarbrücken
stefan.seelecke@imsl.uni-saarland.de
Begutachteter Beitrag/reviewed paper
Seelecke S, Simone F. Eine bioinspirierte künstliche Hand mit Muskel- und Nervendrähten aus NiTi. Orthopädie Technik, 2016; 67 (5): 62–66



- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Belter JT, Segil JL, Dollar AM, Weir RF. Mechanical design and performance specifications of anthropomorphic prosthetic hands: a review. J Rehabil Res Dev, 2013; 50 (5): 599–618
- Connolly C. Prosthetic hands from Touch Bionics. Industrial robot: An International Journal, 2008; 35 (4): 290–293
- Medynski C, Rattray B. Bebionic Prosthetic Design. Proceedings of the MyoElectric Controls/Powered Prosthetics Symposium (MEC), Fredericton (New Brunswick, Canada), August 14–19, 2011: University of New Brunswick, 2011: 1–4
- Miguelez JM. Clinical Experiences With The Michelangelo Hand, A Four-Year Review. Proceedings of the MyoElectric Controls/Powered Prosthetics Symposium (MEC), Fredericton (New Brunswick, Canada), August 14–19, 2011. University of New Brunswick, 2011
- Exii Inc., Japan (Unternehmenshomepage). http://exiii.jp/eng.html (Zugriff am 07.04.2016)
- Bundhoo V, Haslam E, Birch B, Park EJ. A shape memory alloy-based tendon-driven actuation system for biomimetic artificial fingers, part I: design and evaluation. Robotica, 2008; 27 (1): 131
- Hollerbach JM, Hunter I, Ballantyne J. A comparative analysis of actuator technologies for robotics. Robot Rev, 1991; 2 (2): 299–342
- Bundhoo V, Haslam E, Birch B, Park EJ. A shape memory alloy-based tendon-driven actuation system for biomimetic artificial fingers, part I: design and evaluation. Robotica, 2008; 27 (1): 131
- Jung J. Aufbau eines Greifmechanismus mit FGL-Drahtaktoren. Dresden: Fraunhofer-Institut Dresden, 2009
- Cho K., Rosmarin J, Asada H. SBC Hand : A Lightweight Robotic Hand with an SMA Actuator Array implementing C‑segmentation. IEEE International Conference on Robotics and Automation, Roma (Italy), April 10–14, 2007. Roma: IEEE Robotics and Automation Society, 2007: 921–926
- Lee JH, Okamoto S, Matsubara S. Development of Multi-Fingered Prosthetic Hand Using Shape Memory Alloy Type Artificial Muscle. Comput Technol Appl, 2012; 3 (3): 477–484
- Lee JH, Okamoto S, Matsubara S. Development of Multi-Fingered Prosthetic Hand Using Shape Memory Alloy Type Artificial Muscle. Comput Technol Appl, 2012; 3 (3): 477–484
- Dynalloy, Inc. Flexinol® Actuator Wire Technical and Design Data. http://www.dynalloy.com/pdfs/TCF1140.pdf (Zugriff am 07.04.2016)
- Stock M. Bionic hand uses smart wires to mimic muscle fibers. Reuters, July 22, 2015. http://www.reuters.com/article/us-germany-bionic-hand-idUSKCN0PW1N820150722 (Zugriff am 07.04.2016)
