Einleitung
Von zeitgemäßen Prothesenkniegelenken werden umfassende Funktionen erwartet, z. B. eine zuverlässige Umschaltung zwischen Stand- und Schwungphasenmodus, Kniebeugung unter Belastung, Sicherheit bei Lastübernahme (auch in Stolpersituationen) und ein natürliches Gangbild bei unterschiedlichen Gehgeschwindigkeiten. Nach bisherigem Stand der Technik werden diese Funktionen meist durch eine Hydraulikeinheit mit elektronischer Steuerung implementiert. Die dazu erforderlichen Akkus tragen jedoch nicht unerheblich zum Gewicht der Prothese bei, was für Oberschenkelamputierte mit kurzem Stumpf zu einem Problem werden kann. Derzeit werden alle gängigen Kniepassteile unabhängig von der Stumpflänge eingesetzt („One size fits all“). Diese Passteile haben dadurch ihren Massenschwerpunkt zwangsläufig unterhalb der Knieachse. Für Oberschenkelamputierte mit kurzem Stumpf hat dies negative Auswirkungen, die im Folgenden näher erläutert werden. Die Lösung ist ein speziell auf die Bedürfnisse dieser Zielgruppe zugeschnittenes Kniepassteil, das im Folgenden vorgestellt wird.
Das Standardwerk „Amputation und Prothesenversorgung“ führt auf, wie moderne Schaftformen versuchen, die pseudarthrotischen Bewegungen zwischen Stumpf und Prothesenschaft zu reduzieren 1. Trotzdem verbleibt ein gewisses „Spiel“ des Femurs im Schaft. Technisch ausgedrückt: Das Massenträgheitsmoment, das mit der genannten pseudarthrotischen Bewegung einhergeht, ist störend. Die Prothese folgt einer Bewegung des Femurs nur mehr oder weniger präzise (Abb. 1). Neben der Länge des Femurs und der Qualität der Schaftanpassung hängt das Ausmaß dieses Problems daher maßgeblich auch von der Massenverteilung der Prothese ab: Ein höherer Schwerpunkt bei gleichem Gewicht kann die auf den Stumpf einwirkenden Kräfte erheblich reduzieren und so die Führung der Prothese verbessern.
Hydraulikeinheit oberhalb der Knieachse
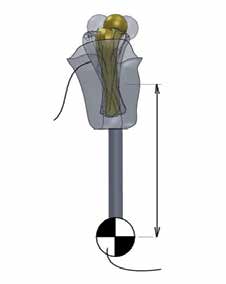
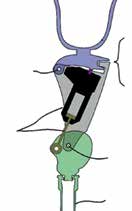
Oberschenkelamputierte mit kurzem Stumpf bekommen manchmal zu hören, ihr Stumpf sei „zu kurz“, um von der Prothese eine vergleichbare Funktion wie beim längeren Stumpf erwarten zu können. Orthomobility sah in diesem scheinbaren Nachteil jedoch die Chance, die freie Bauhöhe zwischen Kniedrehpunkt und Schaft für ein speziell an die Bedürfnisse dieser Zielgruppe angepasstes Kniepassteil zu nutzen: das Very Good Knee – Short Transfemoral (VGK‑S; Abb. 2 u. 3; erforderliche Bauhöhe Abb. 4).
Die Hydraulikeinheit des VKG‑S befindet sich oberhalb der Knieachse. Der proximale Schwerpunkt ermöglicht es, den Unterschenkel in der initialen Schwungphase mit geringerem Kraftaufwand des Stumpfes nach vorne zu bringen. In der terminalen Schwungphase werden beim Abbremsen geringere Kräfte auf den Stumpf ausgeübt.
Das Eigengewicht des VGK‑S spielt für die Bewegung des Unterschenkels praktisch keine Rolle. Dies hat signifikante Vorteile für den Prothesenanwender: Indem die auf den Stumpf einwirkenden Kräfte minimiert werden, werden die Weichteile des Stumpfes weniger deformiert. Dadurch wird das „Spiel“ des Femurs im Schaft reduziert. Es kommt zu einer deutlich besseren propriozeptiven Wahrnehmung der Prothese. Darüber hinaus führt die geringere Krafteinwirkung zu einer reduzierten Belastung der Haut, insbesondere am Schaftrand. Das Risiko des Wundscheuerns sinkt.
Den Nachteil des kurzen Stumpfes in einen Vorteil verkehren
Beim VGK‑S kann die Standphasensicherung durch zwei Mechanismen ausgelöst werden:
- durch das Körpergewicht,
- durch eine Streckbewegung der Hüfte, selbst bei weit gebeugtem Knie.
Je nach Kniewinkel greift also mindestens einer dieser beiden Mechanismen. Die Hüftstreckung kann beim Fersenauftritt erfolgen, ebenso aber auch als reflexartige Reaktion in einer Stolpersituation während der Schwungphase bei bereits weit gebeugtem Knie.
Die Steuerung der Schwung-Standphasenumschaltung des Kniegelenks aus der Hüfte heraus wird durch eine Hilfsachse ermöglicht (Abb. 5). Diese muss oberhalb der Knieachse und möglichst nah an der Hüfte gelagert sein. Während der Vorschwungphase verläuft die Bodenreaktionskraft bereits vor der Hilfsachse, aber noch hinter der Knieachse. Die Hüftbeugung bewirkt in dieser Phase eine minimale, für den Prothesenträger nicht wahrnehmbare Drehung um die Hilfsachse, wodurch das VGK‑S in den Schwungphasenmodus versetzt wird.
Stolperschutz durch Reflex
Auch der Stolperschutz wird über eine Bewegung der Hüfte ausgelöst. Beim Nichtbehinderten bewirkt ein Körperreflex in einer Stolpersituation die Stabilisierung des Körpers durch Anspannung der Hüft- und Kniestreckmuskulatur auf der stolpernden Seite, verbunden mit einer Entlastung der kontralateralen Seite. Dieser Reflex, der unbewusst und automatisch erfolgt, gibt dem Stolpernden die Möglichkeit, den Körper durch einen Schritt nach vorne aufzufangen. Nach Meinung des Autors funktioniert dieser Reflex in Bezug auf die Hüftmuskulatur auch beim Oberschenkelamputierten. Die bisherige Praxis mit dem VGK‑S bestätigt das: Wenn der Prothesenfuß während der Schwungphase hängenbleiben sollte, kommt es reflexartig zu einer Streckbewegung des Stumpfes und einer Gewichtsverlagerung auf die Prothese. Das Very Good Knee – Short Transfemoral schaltet dadurch augenblicklich in den hohen Standphasenwiderstand. Das VGK‑S bietet somit eine ähnliche Sicherheit wie ansonsten nur elektronisch gesteuerte Kniegelenke sowie das Very Good Knee – Go! (VGK-Go!).
Adaptive Fluidsteuerung in der Standphase
Das VGK – Short Transfemoral nutzt die vom Very Good Knee – Go! bekannte und bewährte adaptive Fluidsteuerung, bei welcher sich der Widertand der Hydraulikeinheit unter Zuhilfenahme der Bewegungsenergie der Hydraulikflüssigkeit automatisch und in Echtzeit an die verschiedenen Phasen des Gangzyklus anpasst. Eine Studie der Klinischen Prüfstelle für orthopädische Hilfsmittel der Universität Münster, in der das VGK mit ausgewählten elektronisch gesteuerten Prothesenkniegelenken verglichen wurde, kommt zu dem Ergebnis: „Das VGK ist als einziges der modernen Kniegelenke nicht elektronisch gesteuert, es bietet aber in Hinblick auf die Funktionen ein gleichwertiges Spektrum wie die elektronisch gesteuerten Kniegelenke.“ 2
Wie ist das möglich? Dazu zwei Beispiele für die Funktionsweise der adaptiven Fluidsteuerung: Zur Stabilisierung der Kniebeugung unter Belastung in der Standphase, etwa beim Bergab- oder Treppabgehen, wird die Hydraulikflüssigkeit in einer schnell rotierenden Wirbel- oder Strudelbewegung durch ein Ventil gelenkt. Bei einer Erhöhung der auf das Kniegelenk wirkenden Kräfte bewirkt dieser Wirbel eine augenblickliche Erhöhung des Kniewiderstands, sodass im Ergebnis eine praktisch gleichbleibende Beugefunktion gewahrt bleibt. Dies passiert z. B. durch die zunehmende effektive Hebellänge beim Einsinken unter Belastung (Abb. 6) oder wenn zusätzlich zum eingestellten Nutzergewicht Lasten bergab oder treppab getragen werden. Gleichermaßen kompensiert die Wirbelbewegung den veränderten Widerstand bei erhöhter Viskosität der Hydraulikflüssigkeit, bewirkt also auch bei Erwärmung des Kniepassteils durch die Außentemperatur bzw. durch intensive Nutzung eine gleichbleibende Kniebeugung. Die schlichte Anwendung grundlegender physikalischer Naturgesetze ersetzt so eine aufwendige elektronische Ventilsteuerung.
Adaptive Fluidsteuerung in der Schwungphase
Ein weiteres Grundprinzip der adaptiven Fluidsteuerung ermöglicht unterschiedliche Gehgeschwindigkeiten bei gleichbleibend physiologischem Kniewinkel. Beim VGK‑S wurden bisher 7,5 km/h auf dem Laufband gemessen. Auch das Gewicht des gerade getragenen Schuhs wird durch die adaptive Fluidsteuerung weitgehend kompensiert und hat somit kaum Einfluss auf die Flexionsbewegung des Knies – eine wichtige Eigenschaft im Alltag des Prothesenträgers. Eine erhöhte Gehgeschwindigkeit führt zunächst zu einer schnelleren Bewegung des Kolbens der Hydraulikeinheit, der an den Kniewinkel gekoppelt ist. Dadurch kommt es zu einem erhöhten Druck in einer Hydraulikkammer, der weitere Ventile aktiviert bzw. schließt. Dadurch wird die Bewegung des Kolbens abgebremst und die Kniebeugung limitiert. Die höhere Kolbengeschwindigkeit (infolge der höheren Gehgeschwindigkeit) löst also einen Widerstand gegen diese Geschwindigkeit aus – ein sich selbst regulierender Mechanismus und damit ein weiteres Beispiel für ein Grundprinzip der adaptiven Fluidsteuerung. Der an den physikalischen Grundlagen der Fluidsteuerung interessierte Leser sei in diesem Zusammenhang auf den Artikel „Superquadratic behaviour of vortex diodes“ von Tesar verwiesen 3.
Anforderungen an ein Prothesenknie
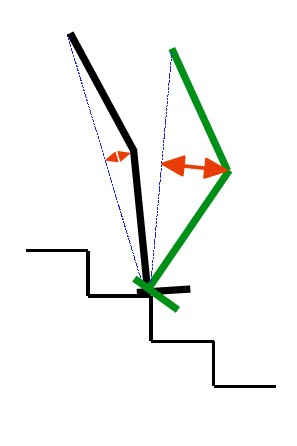
Das VGK‑S erfüllt alle Anforderungen der von Orthomobility postulierten Bedürfnishierarchie eines Oberschenkelamputierten (Tab. 1): Sicherheit in der Standphase, gefolgt vom Stolperschutz in der Schwungphase, werden als wichtigste Grundbedürfnisse angenommen. Aufbauend auf diesen sicherheitsrelevanten Bedürfnissen folgt die Möglichkeit der Kniebeugung unter Belastung (bergab, treppab). Diese sollte mit konstanter Einsinkgeschwindigkeit und auch noch bei sehr stark gebeugtem Knie möglich sein – was auch das sichere Überwinden sehr steiler Gefälle ermöglicht (Abb. 7).
Selbstredend besteht der Wunsch nach einem natürlichen Gangbild mit physiologischer Knieflexion sowohl bei kleinen und langsamen Schritten als auch bei sehr hohen Gehgeschwindigkeiten, möglichst unabhängig vom Gewicht des Schuhwerks.
Auch das Hinknien stellt spezifische Anforderungen an ein Prothesenknie: Beim aufrechten Knien sollte das Becken im Gleichstand sein (Abb. 8). Dazu muss der Abstand zwischen Knieachse und vorderer Kante des Prothesenknies (dem Kontaktpunkt mit dem Boden beim Knien) ein genau definiertes Maß haben, das die Länge des Oberschenkels bei angewinkeltem Knie möglichst genau ausgleicht, denn diese Länge ergibt sich bei sachgerechtem Prothesenaufbau ja zunächst aus der Situation beim Stehen (Kniespalte der kontralateralen Seite plus ca. 20 mm). Darüber hinaus soll der Auflagepunkt (die schwarze Kniekappe beim VGK‑S) so beschaffen sein, dass die Prothese beim Knien auf glattem Untergrund (z. B. Parkett, Teppich) nicht abrutscht bzw. beim Knien auf rauem Untergrund (z. B. Asphalt) nicht verkratzt.
Ein physiologischer maximaler Kniewinkel hat für den Alltag des Oberschenkelamputierten eine nicht zu unterschätzende Bedeutung: Beim angewinkelten Knien auf dem Boden sollte das Gesäß auf der Ferse aufsitzen können (Abb. 9). Nicht minder bedeutsam ist der Kniewinkel bei einer Situation wie der in Abbildung 10 dargestellten: Beim Parken (oder Zugeparktwerden) in engen Parklücken, wenn die Autotür nur wenig geöffnet werden kann, muss das Prothesenknie maximal weit gebeugt werden können.
Weiterhin sollte die Prothese im Nassbereich uneingeschränkt genutzt werden können, auch in Salzwasser. Die Wasserfestigkeit des VGK‑S geht dabei so weit, dass auch die Nutzung unter Wasser, etwa beim Waten durch hüfthohes Wasser, möglich ist, unterstützt durch einen Feststellmodus, um das Knie blockieren zu können (Kombination mit geeigneten wasserfesten Prothesenfüßen und Adapterstücken vorausgesetzt).
Auch die Nutzung bei Hitze, sei es Umgebungshitze oder die betriebsbedingte Erwärmung des Kniegelenks, sollte uneingeschränkt möglich sein. Die spezielle Konstruktion der Hydraulikeinheit des Very Good Knee ermöglicht dabei Temperaturen von über 40 ℃ ohne nennenswerte Veränderung beim Yielding (Kniebeugung unter Belastung bei Kompensation der dann sehr viel höheren Viskosität der Hydraulikflüssigkeit) bzw. ohne nennenswerte Veränderung des Kniewinkels (und damit auch der möglichen Gehgeschwindigkeit) in der Schwungphase. Nicht zuletzt ist auch die Unabhängigkeit von einer Stromversorgung ein Stück Freiheit für den Prothesenträger.
Fazit
Das Very Good Knee – Short Transfemoral stellt einen Meilenstein dar, der die Versorgung von Oberschenkelamputierten mit kurzem Stumpf neu definiert: Der kurze Stumpf sollte – wie auch beckenhohe Versorgungen – mit eigens hierfür entwickelten Kniepassteilen versorgt werden. Dabei spielt der Massenschwerpunkt eine entscheidende Rolle. Zwar erfordern umfassende Leistungsmerkmale nun einmal ein gewisses Gewicht, jedoch relativieren sich die 998 g Gewicht des VGK‑S aufgrund des hohen Schwerpunkts: Durch das geringe Massenträgheitsmoment wirkt das Very Good Knee – Short Transfemoral wie ein herkömmliches Kniepassteil von nur ca. 250 g.
Der Autor:
Jacob Boender, M. Eng., CPO
Orthomobility Ltd.
Mariahof Gut 1
54292 Trier
jacob.boender@verygoodknee.de
Begutachteter Beitrag/reviewed paper
Boender J. Ein neues Kniepassteil für Oberschenkelamputierte mit kurzem Stumpf. Orthopädie Technik, 2016; 67 (12): 18–21
| Prio | Eigenschaft | Kategorie |
|---|---|---|
| 1 | Sicherheit in der Standphase | Sicherheit |
| 2 | Sicherheit (Stolperschutz) in der Schwungphase | |
| 3 | Kniebeugung unter Belastung (bergab, treppab) bei konstanter Einsinkgeschwindigkeit | Natürliches Gangbild |
| 4 | Natürliches Gangbild bei langsamer und schneller Gehgeschwindigkeit | |
| 5 | Beckengleichstand beim aufrechten Knien | Knien und Kniewinkel |
| 6 | Physiologischer maximaler Kniewinkel bis 175° | |
| 7 | Wasserfestigkeit, Kratzfestigkeit | Keine Einschränkungen durch die Prothese |
| 8 | Uneingeschränkte Nutzung auch in Extremsituationen wie z. B. Kälte, Hitze, Feuchtigkeit | |
| 9 | Unabhängigkeit von Stromversorgung |







- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Greitemann B, Brückner L, Schäfer M, Baumgartner R. Amputation und Prothesenversorgung. 4., vollständig überarbeitete Auflage. Stuttgart: Thieme Verlag, 2016: 397
- Schüling S, Hildebrandt M, Tiemeyer K. Kniepassteile mit geregelter Flexionsdämpfung für Oberschenkelamputierte im klinischen cross-over Vergleich: C‑Leg, Rheo-Knee II, VGK, Orion. Münster: Schüling Verlag, 2013
- Tesar V. Superquadratic Behaviour of Vortex Diodes. Proceedings of IFAC Symposium „Pneumatic and Hydraulic Components“, Warschau, 1980: 79
