Einleitung
Die menschliche Hand besteht aus 27 Knochen, 33 Muskeln und 29 Gelenken 1. Sie ist über ein weiteres Gelenk, das Handgelenk, mit dem Unterarm verbunden. Aufgrund dieser hohen Komplexität ist es möglich, Objekte mit 33 verschiedenen Griffen zu manipulieren und zu fixieren 2. Es gibt viele verschiedene Ansätze, diese Handgriffe zu kategorisieren und zu benennen 3. Grundsätzlich können zwei verschiedene Formen von Griffen unterschieden werden: der Kraftgriff und der Präzisionsgriff. Der Kraftgriff wird für schwere oder größere Objekte, der Präzisionsgriff für kleine oder zerbrechliche Gegenstände verwendet 4.
Nach einer Amputation im Bereich des Unterarms kann die Funktion der fehlenden Hand mehr oder weniger gut prothetisch ersetzt werden 5. Die dafür auf dem Markt erhältlichen Prothesenhände wurden in den letzten Jahren erheblich weiterentwickelt 6, sind aber dennoch deutlich weniger funktionell als die gesunde menschliche Hand 7 8.
Etwa 80 bis 90 % aller im Bereich des Unterarms Amputierten entscheiden sich zunächst für eine prothetische Versorgung 9 10, wobei sie ihre Prothese aber nur bei ca. 50 % der Alltagsaktivitäten aktiv nutzen 11. Mit steigender Funktionalität scheint die Prothese häufiger genutzt zu werden.
Der Amputierte hat die Möglichkeit, zwischen einer passiven Hand, einer aktiven Hand mit Eigenkraft-Steuerung (z. B. über Zugbandagen) oder einer aktiven myoelektrischen Hand 12 13 zu wählen. Die Hände aus den beiden letzteren Kategorien erlaubten über Jahrzehnte alle nur eine einzige Bewegung, nämlich das Öffnen und Schließen der Hand im Oppositionsgriff 14. In den letzten Jahren wurden unter anderen mit der „i‑Limb” von Touch Bionics (Großbritannien), der „bebionic Hand” von RSL Steeper (Großbritannien) und der „Michelangelo Hand” der Otto Bock HealthCare GmbH multifunktionale Prothesenhände mit mehreren Gelenken entwickelt, die verschiedene Griffarten ermöglichen 15 16.
Inwieweit diese technischen Fortschritte einen funktionellen Zugewinn bei der Bewältigung von Alltagsaktivitäten bedeuten, wurde bisher in der internationalen Fachliteratur nur anhand eines Einzelfalls dargestellt 17. In der hier vorliegenden Studie wurden 16 Unterarmamputierte mithilfe standardisierter Fragebögen zu ihrer herkömmlichen Armprothese und zur Prothese mit der Michelangelo Hand befragt.
Methodik
An der Beobachtungsstudie nahmen 11 Versorgungszentren teil. Diese versorgten innerhalb des Zeitraums März bis August 2011 erfahrene Unterarmamputierte mit der Michelangelo Hand. Die Amputierten nutzten die neue Hand im Alltag über mindestens 4 Wochen. Vor Beginn wurde die vorherige Prothesenhand und am Ende der Testphase die Michelangelo Hand von den Probanden beurteilt.
Die Befragung erfolgte mit einem standardisierten Fragebogen. Es gibt verschiedene validierte Tests zur Nutzung einer Armprothese bei Alltagsaktivitäten 18 19 20 21, wobei eine Kombination verschiedener Tests zur bestmöglichen Darstellung der Prothesennutzung führen soll 22. Aus diesem Grund wurden hier zwei validierte Fragebögen miteinander kombiniert. Hauptbestandteil dieser Studie war der Orthotics and Prosthetics Users’ Survey – Upper Extremity Functional Status Module (OPUS-UEFS), bei dem die Schwierigkeit der Ausführung von 23 Aktivitäten jeweils bewertet wird 23 24. Allerdings wurde nicht wie in der Originalversion gefragt, wie einfach eine Aktivität allgemein ausgeführt werden kann, sondern der Proband sollte ähnlich wie beim Prosthetic Upper Extremity Functional Index (PUFI) angeben, wie einfach er die folgenden Aktivitäten mit seiner Prothese ausführen kann 25. Die Antwortmöglichkeiten hierzu wurden entsprechend den Ergebnissen einer Studie von Burger et al. 26 ausgewertet, sodass mit einer 4‑stufigen Bewertungsskala gearbeitet wurde: 0 = „kann diese Aktivität nicht mit seiner Prothese ausführen”, 1 = „schwierig”, 2 = „einfach”, 3 = „sehr einfach”.
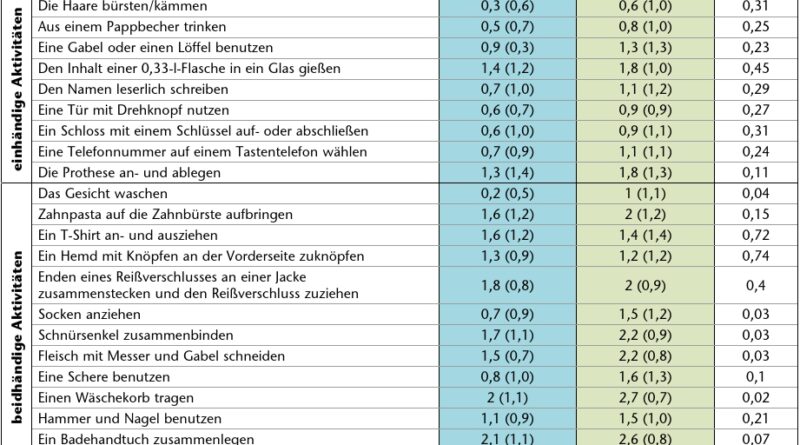
Bei der Auswertung des OPUS-UEFS wurde der Summenscore über alle 23 Aktivitäten, über alle einhändigen („Die Haare bürsten/kämmen”, „Aus einem Pappbecher trinken”, „Eine Gabel oder einen Löffel benutzen”, „Den Inhalt einer 0,33-l-Flasche in ein Glas gießen”, „Den Namen leserlich schreiben”, „Eine Tür mit Drehknopf nutzen”, „Ein Schloss mit einem Schlüssel auf- oder abschließen”, „Eine Telefonnummer auf einem Tastentelefon wählen” sowie „Die Prothese an- und ablegen”) und über alle beidhändigen Aktivitäten („Das Gesicht waschen”, „Zahnpasta auf die Zahnbürste aufbringen”, „Ein T‑Shirt an- und ausziehen”, „Ein Hemd mit Knöpfen an der Vorderseite zuknöpfen”, „Enden eines Reißverschlusses an einer Jacke zusammenstecken und den Reißverschluss hochziehen”, „Socken anziehen”, „Schnürsenkel zusammenbinden”, „Fleisch mit Messer und Gabel schneiden”, „Eine Schere benutzen”, „Einen Wäschekorb tragen”, „Hammer und Nagel benutzen”, „Ein Badetuch zusammenlegen”, „Einen Briefumschlag öffnen” sowie „Den Inhalt einer Schüssel umrühren”) für beide Versorgungen gebildet.
Außerdem wurde der OPUS mit einer Frage und den entsprechenden Antwortmöglichkeiten aus dem Prosthetic Upper Extremity Functional Index (PUFI) ergänzt: „Wie führen Sie diese Aktivität üblicherweise aus?” 27. Anhand dieser Ergebnisse konnte bestimmt werden, ob die Probanden üblicherweise für die jeweilige Aktivität ihre Prothese aktiv, passiv oder gar nicht nutzen.
Alle Ergebnisse wurden mithilfe des Wilcoxon-Tests auf signifikante Unterschiede überprüft, wobei als Signifikanzgrenze p < 0,05 festgelegt wurde. Bei p < 0,01 wird von hoch signifikanten Unterschieden gesprochen. Zudem wurden demografische Daten der Probanden sowie Angaben zu ihrer prothetischen Versorgung erhoben.
Die Michelangelo Hand
Die Michelangelo Hand (Abb. 1) besteht aus 4 auf der Ebene der Metacarpophalangealgelenke beweglichen Fingern, einem durch Muskelsignale separat positionierbaren Daumen, einer mechanischen Verbindung, die alle 4 Finger und den Daumen mit dem Hauptantrieb verkoppelt, sowie aus einem beweglichen Handgelenk. Die Anordnung der Bewegungsachsen der Fingergrundgelenke, des Daumengrundgelenks und des Handgelenks sind dem natürlichen Vorbild nachempfunden.
Daumen, Zeige- und Mittelfinger dienen dem Aufbau der Griffkraft. Diese 3 Finger sind über Lenker direkt mit dem Hauptantrieb verbunden. Somit wird die komplette Kraft des Hauptantriebs auf diese 3 Finger übertragen. Ringfinger und kleiner Finger werden unterstützend mitgeführt. Zudem verfügt die Hand über einen Daumenantrieb, der eine elektronische Positionierung des Daumens sowohl in Opposition (Abb. 2c) als auch in lateraler Stellung (Abb. 2a) zum Zeigefinger ermöglicht. Bei Nichtbenutzung, also bei Muskelentspannung, kann die Hand per Software so programmiert werden, dass sie automatisch die Neutralstellung (Abb. 2d) einnimmt, die der entspannten Stellung der natürlichen Hand entspricht. Dadurch entsteht eine Handfläche mit einem außenrotierten Daumen. Aus diesen drei unterschiedlichen Daumenpositionen entstehen 7 verschiedene Handpositionen, die in Abbildung 2 dargestellt sind.
Das integrierte Handgelenk besteht aus zwei Modulen, mit denen eine passive Rotation sowie eine passive Flexion/Extension durchgeführt werden können. Im starren Modus kann das Handgelenk über 8 Rasterpositionen in gewünschter Flexions- bzw. Extensionsstellung verriegelt werden. Es verfügt aber wahlweise auch über einen zusätzlichen flexiblen Modus, in dem das Gelenk ohne Rasterungen benutzt werden kann. Die Bewegung im flexiblen Modus erfolgt gegen einen Federwiderstand und springt immer wieder in die Null-Position des Handgelenks zurück. Das Handgelenk ist flachoval gestaltet, wie sein natürliches Vorbild. Sowohl im starren als auch im flexiblen Modus kann es um 360° rotiert und in 15°-Schritten eingerastet werden.
Die Datenübertragung der Michelangelo Hand erfolgt über ein AXON-Bus-System (AXON = adaptive exchange of neuroplacement data). Über eine zentrale Steuerungseinheit werden Steuersignale des Anwenders aufgenommen und den Handkomponenten zugeordnet. Außerdem wird hier die Datenkommunikation überwacht. Die elektrische Versorgung der Einheit erfolgt zentral über einen Akkumulator, der aus 3 Lithium-Ionen-Zellen besteht. Die Prothesenkomponenten werden über Bluetooth®-Datentransfer mithilfe der Software AxonSoft eingestellt.
Ergebnisse
Probanden
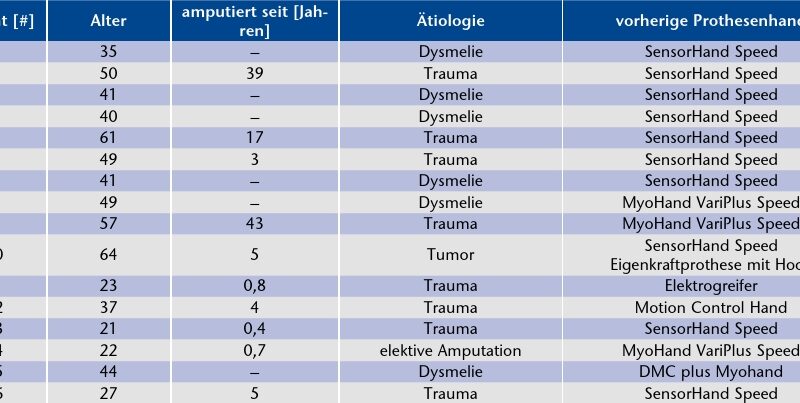
An der Studie nahmen 16 unilateral transradial amputierte männliche Probanden teil. Sie waren im Mittel 41 ± 14 Jahre alt. 6 Probanden fehlt bereits seit der Geburt eine Hand, 8 Probanden haben ihre Hand traumatisch verloren, bei einem Probanden war ein Tumor die Amputationsursache, und ein weiterer Proband hatte sich aufgrund der Funktionslosigkeit seiner Hand für eine elektive Amputation entschieden. Im Mittel fanden diese Amputationen vor 12,8 ± 16,8 Jahren statt. Die Testversorgung mit der Michelangelo Hand dauerte mindestens 4 Wochen. Detaillierte Angaben über die Probanden können Tabelle 1 entnommen werden.
Prothesen
Die Probanden waren mit unterschiedlichen myoelektrischen Händen bzw. Geräten vorversorgt. Die genauen Angaben können Tabelle 1 entnommen werden. Für diese Beobachtungsstudie wurden alle Patienten einheitlich mit der Michelangelo Hand versorgt.
OPUS-UEFS
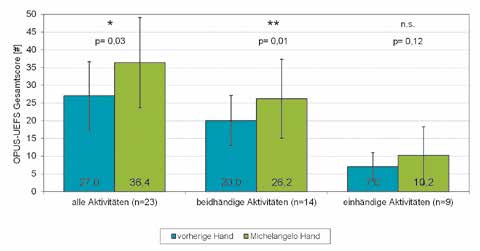
Der mittlere Gesamtscore des OPUS-UEFS für 23 Aktivitäten ist mit der Michelangelo Hand (36,4) signifikant (p = 0,03) besser als mit der vorherigen Hand (27,0) (Abb. 3). Dabei unterscheidet sich der mittlere Gesamtscore für die beidhändigen Aktivitäten hoch signifikant (p = 0,01) zwischen beiden Händen, während für die einhändigen Aktivitäten keine signifikante Differenz festgestellt werden konnte. Im Mittel ist bei 20 der 23 Aktivitäten eine Verbesserung mit der Michelangelo Hand zu sehen, wobei diese Steigerung bei 5 Aktivitäten signifikant war („Das Gesicht waschen”, „Socken anziehen”, „Schnürsenkel zusammenbinden”, „Fleisch mit Messer und Gabel schneiden”, „Einen Wäschekorb tragen”). Zwei Aktivitäten wurden von den Probanden mit ihrer vorherigen Hand als tendenziell einfacher beschrieben, nämlich „Ein T‑Shirt an- und ausziehen” und „Ein Hemd mit Knöpfen an der Vorderseite schließen”. Dieser Unterschied war allerdings nicht signifikant.
Ergänzende Fragen des PUFI
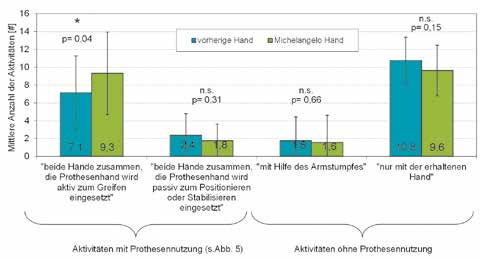
Bei der Art der Prothesennutzung für die Aktivitäten zeigen sich ebenfalls deutliche Unterschiede zwischen beiden Versorgungen (Abb. 4). Die Antwortmöglichkeit „beide Hände zusammen, die Prothesenhand wird aktiv zum Greifen genutzt” wurde mit der Michelangelo Hand für signifikant (p = 0,04) mehr Aktivitäten genannt als mit der vorherigen Hand. Dagegen zeigten sich bei den Antwortmöglichkeiten „beide Hände zusammen, die Prothesenhand wird passiv zum Positionieren oder Stabilisieren eingesetzt”, „mithilfe des Armstumpfes” und „nur mit der erhaltenen Hand” nur minimale Unterschiede zwischen beiden Versorgungen. Die beiden Antwortmöglichkeiten „mithilfe einer anderen Person” und „auf andere Weise” wurden beide mit der vorherigen Hand von drei Probanden jeweils einmal und mit der Michelangelo Hand kein- („mithilfe einer anderen Person”) bzw. einmal („auf andere Weise”) genutzt und werden daher nicht weiter berücksichtigt.
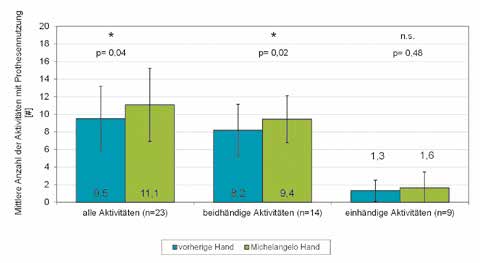
Fasst man die Antwortmöglichkeiten für „beide Hände zusammen, die Prothesenhand wird aktiv zum Greifen genutzt” und „beide Hände zusammen, die Prothesenhand wird passiv zum Positionieren oder Stabilisieren eingesetzt” zusammen, ist die mittlere Anzahl der Aktivitäten, bei denen die Prothese genutzt wird, für die Versorgung mit der Michelangelo Hand mit 11,1 signifikant (p = 0,04) größer als mit der vorherigen Versorgung mit 9,5 Aktivitäten (Abb. 5). Bei den einhändigen Aktivitäten zeigt sich kein Unterschied zwischen den Versorgungen, wohingegen bei den beidhändigen Aktivitäten mit der Michelangelo Hand mit 9,4 Aktivitäten wiederum signifikant (p = 0,02) häufiger die Prothese genutzt wird als mit der vorherigen Versorgung mit 8,2 (siehe Abb. 5).
Diskussion
Die Ergebnisse zur Nutzung der Prothese bei den jeweiligen Aktivitäten sind vergleichbar mit den Ergebnissen von Burger 28. Auch hier wird bei einhändigen Aktivitäten die Prothese von weniger Probanden genutzt als bei beidhändigen Aktivitäten. Die Unterteilung in ein- und beidhändige Aktivitäten scheint auch bei der Betrachtung der Ergebnisse zur empfundenen Schwierigkeit der Tätigkeiten sinnvoll. In der hier vorliegenden Studie ergibt sich für die Probanden eine deutliche Verminderung der Schwierigkeit der beidhändigen Aktivitäten mit der Michelangelo Hand, die bei der reinen Betrachtung des Gesamtscores für alle Aktivitäten nicht so deutlich wird. Die Tätigkeiten, die mit nur einer Hand ausgeführt werden können, werden, wie die Ergebnisse zeigen, typischerweise nicht mit der Prothesenhand, sondern mit der erhaltenen Hand ausgeführt 29 30. Daher fehlt den Probanden die Übung für den geschickten und geübten Umgang mit ihrer wesentlich funktionelleren Prothesenhand, weshalb diese Aktivitäten auf den ersten Blick nicht erleichtert werden.
Hinzu kommt, dass die Probanden nicht einheitlich ergotherapeutisch begleitet wurden, sodass die Aktivitäten, die sie im Alltag nicht durchführen, auch nicht bei allen gleichermaßen mit einem Therapeuten geübt wurden. Dennoch liegt bei allen einhändigen Aktivitäten ebenfalls eine tendenzielle Verbesserung mit der Michelangelo Hand vor; nur bei zwei beidhändigen Aktivitäten („Ein T‑Shirt an- und ausziehen” und „Ein Hemd mit Knöpfen an der Vorderseite zuknöpfen”) zeigte sich im Mittel eine tendenzielle Verschlechterung. Die Unterschiede bei diesen beiden Aktivitäten zwischen der Neuversorgung und einer herkömmlichen myoelektrischen Hand sind allerdings nicht signifikant und somit vernachlässigbar. Die beiden anderen Aktivitäten, die sich mit dem Ankleiden beschäftigen, „Socken anziehen” und „Schnürsenkel zusammenbinden”, wurden hingegen von den Probanden mit der Michelangelo Hand als signifikant leichter empfunden. Die daraus resultierende Vereinfachung des Ankleidens ermöglicht einem Amputierten eine größere Selbstständigkeit und Unabhängigkeit.
Es ist bekannt, dass neben dem Ankleiden gerade Aktivitäten, die zur Körperpflege zählen, nur sehr selten mit einer Armprothese ausgeführt werden 31, obwohl es den Amputierten, besonders Frauen, sehr wichtig wäre, diese mit ihrer Prothese ausführen zu können 32. Daher zeigt die signifikante Vereinfachung der Aktivität „Das Gesicht waschen” einen weiteren deutlichen Zugewinn der multifunktionalen Hand gegenüber der vorherigen Hand. Die konventionellen myoelektrischen Hände ermöglichen dem Anwender nicht, eine Handfläche zu bilden, um flächig über das Gesicht zu streichen. Dagegen ist dies mit der Michelangelo Hand in ihrer Neutralstellung möglich; hinzu kommt bei dieser noch das flexible Handgelenk, durch das sich die Hand bei der Tätigkeit des Gesichtwaschens an das Gesicht anschmiegen kann.
Obwohl die meisten Aktivitäten den Probanden mit der multifunktionalen Hand leichter fielen, liegen die Ergebnisse für viele Aktivitäten noch deutlich unter der maximalen Punktzahl 3 („sehr einfach”). Der Gesamtscore des OPUS ist zwar mit der Michelangelo Hand mit 36 im Vergleich zu dem mit konventionellen myoelektrischen Händen signifikant erhöht, erreicht aber nur ca. 53 % des Gesamtscores einer gesunden Hand. Dies zeigt, dass die Funktionalität der natürlichen Hand zwar bereits besser nachgebildet werden kann, dass jedoch noch immer ein deutlicher Abstand zum natürlichen Vorbild vorhanden ist und dass noch weiteres Entwicklungspotenzial besteht.
Die hier vorliegende Untersuchung wurde mit einem passiv gesteuerten Handgelenk durchgeführt, bei dem sowohl die Rotation als auch die Flexion/Extension manuell eingestellt werden kann.
Auf der OTWorld 2014 wurde inzwischen die neue Version der Michelangelo Hand mit aktiver myoelektrischer Handgelenkrotation vorgestellt. Aufgrund dieser aktiven Steuerung der Rotation wird es sicherlich zu einer weiteren Erleichterung der Alltagsaktivitäten kommen, wovon insbesondere doppelseitig amputierte Anwender profitieren werden. Die Ergebnisse zu der Frage aus dem PUFI können nicht mit Literaturangaben verglichen werden, da der PUFI nur für Aktivitäten von Kindern und Jugendlichen validiert ist 33 34 35 und diese im Allgemeinen andere Anforderungen an ihre Prothesen haben 36. Die Ergänzung des OPUS-UEFS mit diesen Fragen erwies sich in dieser Studie dennoch als sehr wertvoll. Die Ergebnisse machen deutlich, dass die funktionellere Prothese signifikant häufiger nicht nur passiv, sondern aktiv zum Greifen benutzt wird. Diese aktive Nutzung der Prothese bei Alltagsaktivitäten erleichtert nicht nur den Alltag, sondern lässt den Amputierten insgesamt natürlicher wirken. Dies ist für Amputierte der oberen Extremität von besonders hoher Bedeutung und kann aufgrund des verbesserten kosmetischen Erscheinungsbildes die Akzeptanz der Prothese erhöhen 37 38.
Die Ergebnisse der hier vorliegenden Studie geben die subjektive Einschätzung der Probanden selbst wieder. Beobachtet man die Probanden beim Durchführen der verschiedenen Aktivitäten, fällt eine generelle Reduzierung der Kompensationsbewegungen auf, die von den Probanden teils nicht wahrgenommen wird und somit nicht in den Ergebnissen wiederzufinden ist. Um diese Verbesserung durch die Michelangelo Hand zu belegen, bedarf es zusätzlicher biomechanischer Studien.
Schlussfolgerung
Die Michelangelo Hand bietet mit ihren 7 verschiedenen Handpositionen und dem integrierten beweglichen Handgelenk dem Amputierten neue Möglichkeiten, die Prothese zu nutzen. Damit der Amputierte diese höhere Funktionalität bei Alltagsaktivitäten nutzt und dadurch auch von ihr profitiert, benötigt er viel Übung und eine gezielte ergotherapeutische Betreuung. Nach einer kurzen Testphase ohne einheitliche ergotherapeutische Betreuung konnte bereits eine häufigere und aktivere Nutzung der Prothesenhand sowie eine signifikante Erleichterung der beidhändigen Tätigkeiten mit der multifunktionalen Hand im Vergleich zu einer konventionellen myoelektrischen Hand festgestellt werden. Eine weitere Steigerung durch gezieltes Training und eine längere Testphase kann vermutet werden.
Für die Autoren:
Dipl.-Ing. (FH) Eva Pröbsting
Otto Bock HealthCare GmbH
Hermann-Rein-Straße 2a
37075 Göttingen
Eva.Proebsting@ottobock.de
Begutachteter Beitrag/reviewed paper
Pröbsting E, Kannenberg A. Alltagsaktivitäten mit der Michelangelo Hand im Vergleich zu konventionellen Myo-Prothesenhänden. Orthopädie Technik, 2014; 65 (9): 54–60

- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Miguelez J. New technologies poised to increase upper limb prosthetic acceptance. O&P Business News; 2012 [cited 2013 Feb 19]. http://www.healio.com/orthotics-prosthesis/news/print/…w‑technologies-poised-to-increase-upper-limb-prosthetic-acceptance
- Feix T, Pawlik R, Schmiedmayer H‑B, Romero J, Kragic D. A comprehensive grasp taxonomy. Paper presented at the robotic, science and systems conference: workshop on understanding the human hand for advancing robotic manipulation. Seattle, WA, USA, 2009
- Romero J, Ek CH, Kragic D. Grasp Taxonomy Comparison Sheet. 2012 [cited 2013 May 27]. http://grasp.xief.net/documents/taxonomy_comparison.pdf
- Landsmeer JM. Power grip and precision handling. Ann Rheum Dis, 1962; 21: 164–170
- Pylatiuk C, Schulz S, Döderlein L. Results of an Internet survey of myoelectric prosthetic hand users. Prosthet Orthot Int 2007; 31 (4): 362–370
- Hill W, Stavdahl O, Hermansson LN, et al. Functional outcomes in the WHO-ICF model: Establishment of the Upper Limb Prosthetic Outcome Measures Group. Journal of Prosthetics and Orthotics, 2009b; 21: 115–119
- Pylatiuk C, Schulz S, Döderlein L. Results of an Internet survey of myoelectric prosthetic hand users. Prosthet Orthot Int 2007; 31 (4): 362–370
- Van der Niet Otr O, Reinders-Messelink HA, Bongers RM, Bouwsema H, Van Der Sluis CK. The i‑LIMB hand and the DMC plus hand compared: a case report. Prosthet Orthot Int, 2010; 34 (2): 216–220
- Østlie K, Lesjø IM, Franklin RJ, Garfelt B, Skjeldal OH, Magnus P. Prosthesis use in adult acquired major upper-limb amputees: patterns of wear, prosthetic skills and the actual use of prostheses in activities of daily life. Disabil Rehabil Assist Technol, 2012; 7 (6): 479–493
- Datta D, Kingston J, Ronald J. Myoelectric prostheses for below-elbow amputees: the Trent experience. Int Disabil Stud, 1989; 11: 167–170
- Østlie K, Lesjø IM, Franklin RJ, Garfelt B, Skjeldal OH, Magnus P. Prosthesis use in adult acquired major upper-limb amputees: patterns of wear, prosthetic skills and the actual use of prostheses in activities of daily life. Disabil Rehabil Assist Technol, 2012; 7 (6): 479–493
- Biddiss EA, Chau TT. Upper limb prosthesis use and abandonment: A survey of the last 25 years. Prosthetics and Orthotics International, 2007d; 31 (3): 236–257
- Schmurr LM, Gulick K, Yancosek K, Ganz O. Managing the Upper Extremity Amputee: A Protocol for Success. J Hand Ther, 2008; 21 (2): 160–175
- Van der Niet Otr O, Reinders-Messelink HA, Bongers RM, Bouwsema H, Van Der Sluis CK. The i‑LIMB hand and the DMC plus hand compared: a case report. Prosthet Orthot Int, 2010; 34 (2): 216–220
- Miguelez J. New technologies poised to increase upper limb prosthetic acceptance. O&P Business News; 2012 [cited 2013 Feb 19]. http://www.healio.com/orthotics-prosthesis/news/print/…w‑technologies-poised-to-increase-upper-limb-prosthetic-acceptance
- Cipriani C, Controzzi M, Carrozza M. The SmartHand transradial prosthesis. Journal of Neuroengineering and Rehabilitation, 2011; 8 (5): 29
- Van der Niet Otr O, Reinders-Messelink HA, Bongers RM, Bouwsema H, Van Der Sluis CK. The i‑LIMB hand and the DMC plus hand compared: a case report. Prosthet Orthot Int, 2010; 34 (2): 216–220
- Hill W, Stavdahl O, Hermansson LN, et al. Functional outcomes in the WHO-ICF model: Establishment of the Upper Limb Prosthetic Outcome Measures Group. Journal of Prosthetics and Orthotics, 2009b; 21: 115–119
- Miller LA, Swanson S. Summary and Recommendations of the Academy’s State of the Science Conference on Upper Limb Prosthetic Outcome Measures. JPO, 2009; 21 (4S): 83–90
- Lindner HY, Nätterlund BS, Hermansson LM. Upper limb prosthetic outcome measures: review and content comparison based on International Classification of Functioning, Disability and Health. Prosthet Orthot Int, 2010; 34 (2): 109–128
- Wright V. Prosthetic Outcome Measures for Use With Upper Limb Amputees: A Systematic Review of the Peer-Reviewed Literature. 1970 to 2009. JPO, 2009; 21 (4S): 3–28
- Lindner HY, Nätterlund BS, Hermansson LM. Upper limb prosthetic outcome measures: review and content comparison based on International Classification of Functioning, Disability and Health. Prosthet Orthot Int, 2010; 34 (2): 109–128
- Burger H, Franchignoni F, Heinemann AW, Kotnik S, Giordano A. Validation of the orthotics and prosthetics user survey upper extremity functional status module in people with unilateral upper limb amputation. J Rehabil Med, 2008; 40: 393–399
- Heinemann AW, Bode R, O’Reilly C. Development and measurement properties of the orthotics and prosthetics users’ survey (OPUS): a comprehensive set of clinical outcome instruments. Prosthet Orthot Int, 2003; 27: 191–206
- Wright V, Hubbard S, Naumann S, Jutai J. Evaluation of the Validity of the Prosthetic Upper Extremity Functional Index for Children. Arch Phys Med Rehabil, 2003; 84: 518–527
- Burger H, Franchignoni F, Heinemann AW, Kotnik S, Giordano A. Validation of the orthotics and prosthetics user survey upper extremity functional status module in people with unilateral upper limb amputation. J Rehabil Med, 2008; 40: 393–399
- Wright V, Hubbard S, Naumann S, Jutai J. Evaluation of the Validity of the Prosthetic Upper Extremity Functional Index for Children. Arch Phys Med Rehabil, 2003; 84: 518–527
- Burger H, Franchignoni F, Heinemann AW, Kotnik S, Giordano A. Validation of the orthotics and prosthetics user survey upper extremity functional status module in people with unilateral upper limb amputation. J Rehabil Med, 2008; 40: 393–399
- Schmurr LM, Gulick K, Yancosek K, Ganz O. Managing the Upper Extremity Amputee: A Protocol for Success. J Hand Ther, 2008; 21 (2): 160–175
- Burger H, Franchignoni F, Heinemann AW, Kotnik S, Giordano A. Validation of the orthotics and prosthetics user survey upper extremity functional status module in people with unilateral upper limb amputation. J Rehabil Med, 2008; 40: 393–399
- Kejlaa GH. Consumer concerns and the functional value of prostheses to upper limb amputees. Prosthet Orthot Int, 1993; 17 (3): 157–163
- Pylatiuk C, Schulz S, Döderlein L. Results of an Internet survey of myoelectric prosthetic hand users. Prosthet Orthot Int 2007; 31 (4): 362–370
- Lindner HY, Nätterlund BS, Hermansson LM. Upper limb prosthetic outcome measures: review and content comparison based on International Classification of Functioning, Disability and Health. Prosthet Orthot Int, 2010; 34 (2): 109–128
- Wright V. Prosthetic Outcome Measures for Use With Upper Limb Amputees: A Systematic Review of the Peer-Reviewed Literature. 1970 to 2009. JPO, 2009; 21 (4S): 3–28
- Wright V, Hubbard S, Naumann S, Jutai J. Evaluation of the Validity of the Prosthetic Upper Extremity Functional Index for Children. Arch Phys Med Rehabil, 2003; 84: 518–527
- Pylatiuk C, Schulz S, Döderlein L. Results of an Internet survey of myoelectric prosthetic hand users. Prosthet Orthot Int 2007; 31 (4): 362–370
- Kejlaa GH. Consumer concerns and the functional value of prostheses to upper limb amputees. Prosthet Orthot Int, 1993; 17 (3): 157–163
- Datta D, Selvarajah K, Davey N. Functional outcome of patients with proximal upper limb deficiency – acquired and congenital. Clinical Rehabilitation, 2004; 18 (2): 172–177
