Einleitung
In der Ganganalyse wird seit vielen Jahren eine entsprechende Sensorik zur Erfassung der Kinetik und Kinematik von Probanden verwendet. Die technischen Möglichkeiten moderner Erfassungssysteme erlauben eine hohe Messgenauigkeit, wobei die tatsächliche Qualität und Aussagekraft der Messdaten aufgrund der vielen potenziellen Fehlerquellen immer kritisch hinterfragt werden sollte. Die Erfassung der Kinetik von Probanden mit Kraftmessplatten, eingelassen im Boden des Bewegungslabors, weist zwar die höchste Genauigkeit bei der Erfassung der Kinetik auf. Jedoch bedeutet dies, dass die Zahl der verwertbaren Schritte im Hinblick auf die Untersuchungsdauer nur gering ist, da die Platten vom Probanden genau getroffen werden müssen und dabei immer nur ein kurzer Ausschnitt der gesamten Messung betrachtet werden kann.
Die im Boden befindliche Sensorik kann aber auch direkt in den Prothesenaufbau integriert werden – dadurch kann der beschriebene Nachteil der wenigen verwertbaren Schritte und der ortsgebundenen Messung überwunden werden. Dazu wurden in der Vergangenheit Studien sowohl mit kommerziell erhältlichen als auch mit selbst entwickelten Systemen durchgeführt 1 2 3 4 5 6 7 8 9. Allerdings scheinen solche Systeme bis heute nicht großflächig eingesetzt zu werden. Die Hintergründe dessen sind unklar und nicht dokumentiert, könnten aber in den Aspekten Genauigkeit, Anwendung und Auswertung begründet sein 10.
Im Folgenden wird die Anwendung eines speziellen Kraft- und Momentensensors (kurz KMS) im Hinblick auf seine Eignung zur Generierung von Eingangsdaten für die Entwicklung von Prothesenfüßen, aber auch zur Darstellung der unterschiedlichen Prothesenfunktionen betrachtet. Ein wesentliches Unterscheidungsmerkmal von Prothesenfüßen ist das vorgesehene Anwendungsgebiet und damit auch die zu erwartende durchschnittliche Gehgeschwindigkeit des Anwenders. In den Studien 11 12 13 14 konnte diese mit dem Aktivitäts- bzw. Mobilitätsgrad (K‑Level) des Anwenders korreliert werden. Mit Blick auf die Prothesenentwicklung hinsichtlich unterschiedlicher Gehgeschwindigkeiten stellt sich die Frage, wie sich die auf den Prothesenfuß einwirkenden Kräfte und Drehmomente in Abhängigkeit von den Konstruktionsmerkmalen verändern. Dabei ist zu berücksichtigen, dass die Biomechanik des Gehens bei unterschiedlichen Geschwindigkeiten ebenfalls variiert 15 16. Somit ist es die Wechselwirkung zwischen Prothesenfuß und Anwender, die sich wiederum in der Kinetik und der Kinematik messbar niederschlägt. Dabei kann der hier vorgestellte KMS ein hilfreiches Mittel sein, Messdaten innerhalb und außerhalb des Labors zu erheben.
Methodik
Für die Studie wurden Messungen mit einem aktiven Prothesenträger durchgeführt (transtibiale Amputation nach Trauma, Amputationszeit > 10 Jahre, Gewicht ca. 105 kg, Alter 55 Jahre, Mobilitätsgrad K3 17). Die Messungen wurden im Verlauf mehrerer Einzelmesstage mittels eines leichten (180 g, 36 mm Gesamtaufbauhöhe) in den Prothesenaufbau integrierten speziell angefertigten Kraft- und Momentensensors (Sensix, Poitiers, Frankreich) vorgenommen. Die Untersuchungen fanden im Rahmen herstellerspezifischer Studien statt und sind durch ein Ethikprotokoll der isländischen Arzneimittelbehörde „Lyfjastofnun“ (Icelandic Medicines Agency, IMA) abgedeckt. Sie wurden in einem Bewegungslabor in Island durchgeführt.
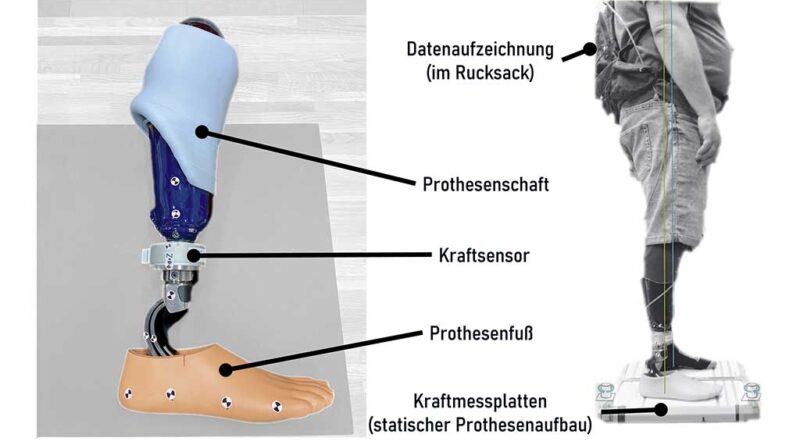
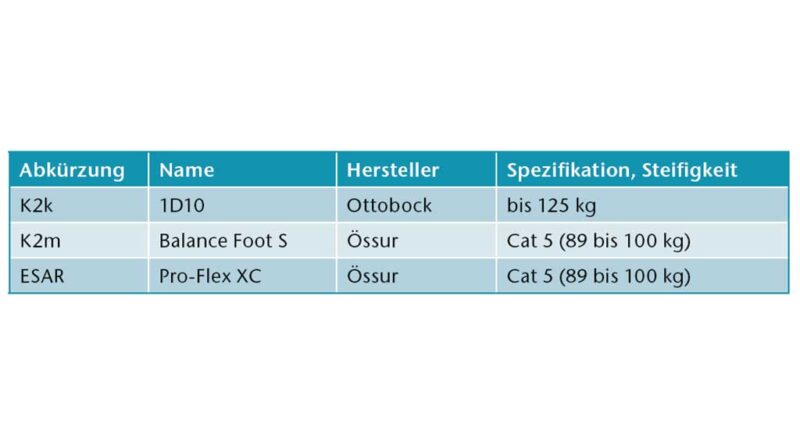
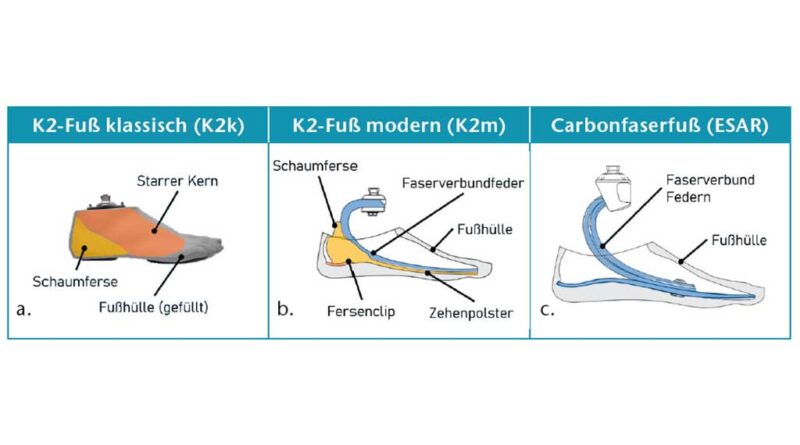
Der Prothesenaufbau wurde von einem Orthopädietechniker mit einem Messsystem („3D L.A.S.A.R.“, Ottobock, Duderstadt, Deutschland) richtliniengetreu sichergestellt. In Abbildung 1 ist die Prothese mit dem verwendeten Kraft- und Momentensensor (kurz KMS) dargestellt, der in allen Aufbauvarianten direkt über dem Prothesenfuß mittels Prothesenaufnahmen angebracht ist. Die Datenaufzeichnung („DataQ DI-710“, 600 Hz) befindet sich in einem leichten Rucksack und ist per Kabel mit dem KMS verbunden. Die Genauigkeit des Messsystems wurde gegenüber einem weiteren KMS-System, integriert in einen maschinellen Gangsimulator 18, überprüft. Die für die Studie verwendeten Prothesenfüße werden in Tabelle 1 spezifiziert. Eine detaillierte Beschreibung des Aufbaus ist in den Abbildungen 2a–c dargestellt. Die gewählten Prothesenfüße decken ein breites Produktspektrum ab: von einem sehr einfachen Fuß („K2k“) über eine optimierte Abwandlung davon („K2m“) bis zu einem flexiblen Carbonfaserfuß („ESAR“).
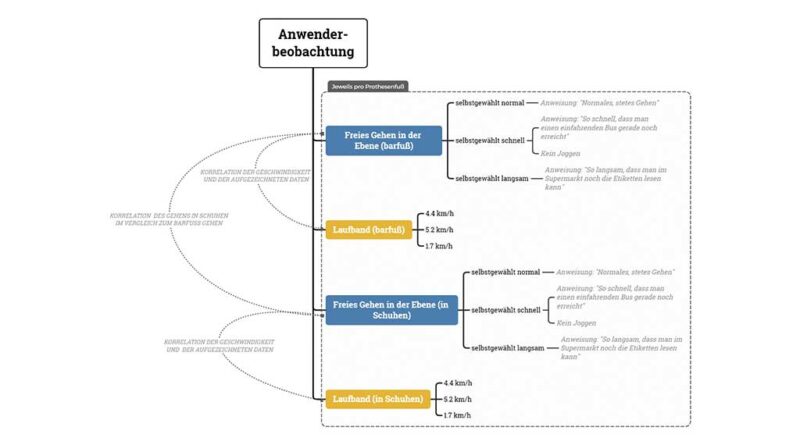
Die für die Studie ausgewählten Geschwindigkeiten wurden vom Probanden mit dem ESAR-Fuß festgelegt. Dabei galten folgende Vorgaben:
- „normales Gehen“;
- „langsames Gehen, sodass z. B. im Supermarkt noch die Etiketten in den Regalen gelesen werden können“;
- „sehr zügiges Gehen, z. B. zum Erreichen eines einfahrenden Busses“.
Die Messungen wurden zunächst ohne Schuhe, im Anschluss mit Schuhen (Modell „Apex“, Viking, Oslo, Norwegen) durchgeführt. Nach der Messung des freien Gehens im Bewegungslabor mit dem jeweiligen Prothesenfuß (15 m gerade Strecke) wurden die Untersuchungen auf einem Laufband wiederholt. Dabei wurden mit dem ESAR-Fuß die folgenden Gehgeschwindigkeiten festgelegt:
- SSS („self-selected slow“) 0.47 m/s (1.7 km/h),
- SSM („self-selected medium“) 1.17 m/s (4.2 km/h) und
- SSF („self-selected fast“) 1.44 m/s (5.6 km/h).
Im weiteren Verlauf wurden nach dem gleichen Protokoll die weiteren Prothesenfüße untersucht (Abb. 3).
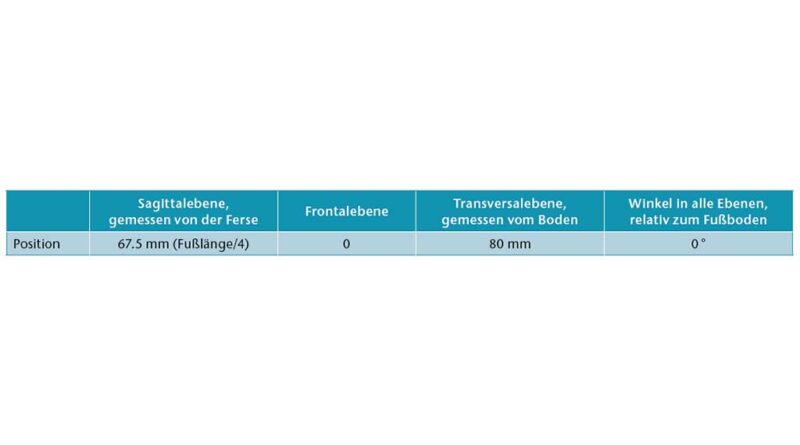
Die Auswertung der vorliegenden Rohdaten wurde mittels selbst entwickelter Algorithmen („Matlab“, MathWorks, Natick, MA, USA) durchgeführt. Jeder Einzeldatensatz wurde zunächst aufbereitet (Übersprechen und Tara der Einzelkanäle) sowie eine Filterung (Butterworth, 50 Hz Tiefpass, 5. Ordnung) durchgeführt und in Einzelschritte aufgespalten. Die Bodenkontaktzeit, hier als „Einzelschrittstandphasendauer“ (kurz EStD) bezeichnet, wurde wiederum statistisch bewertet. Hieraus kann ein statistisches Maximum aller EStD sowie die Varianz davon abgeleitet werden. Als Bandbreite der Abweichung vom jeweiligen zeitlichen Maximum jeder Messung wurde ein Fenster von +/- 0.2 s gewählt. Somit konnten im Gesamtdatensatz abweichende schnelle bzw. langsame Schritte (z. B. Stehen) einfach herausgefiltert werden. Zum Vergleich der Prothesenfüße wurde für die Kraft- und Momentendaten ein Drehzentrum des Knöchelgelenks als Ursprung des Koordinatensystems angenommen 19 und die KMS-Daten virtuell dorthin verschoben (3D-Translation und ‑Rotation) (Tab. 2).
Ergebnisse
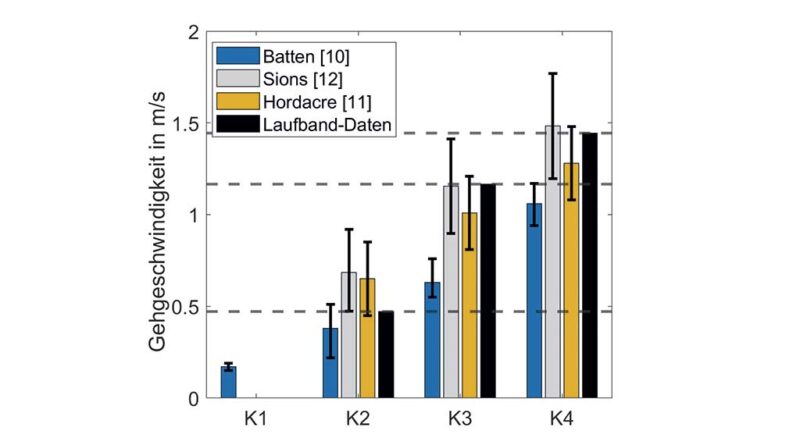
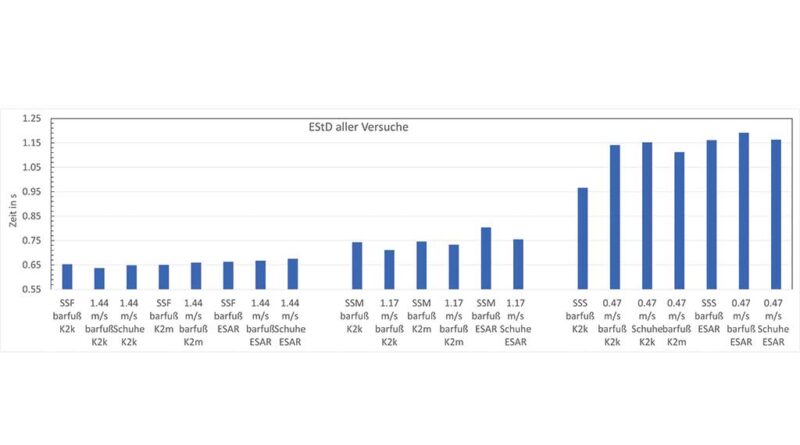
Die Gesamtdauer der Einzelversuche variierte zwischen 3 und 5 Minuten Gehzeit. Aus den Laufbandversuchen kann unmittelbar die Gehgeschwindigkeit ausgelesen und mit den Daten aus der Literatur 20 21 22 23 verglichen werden, die den Aktivitäts- bzw. Mobilitätsgrad mit der durchschnittlichen Gehgeschwindigkeit korrelieren (Abb. 4). Dabei repräsentiert die selektierte Geschwindigkeit „langsam“ (0.47 m/s) die durchschnittliche Gehgeschwindigkeit von K2-Nutzern gut und liegt im Durchschnitt der Studien. Für einen durchschnittlichen K3- und K4-Nutzer liegen die ausgewählten Gehgeschwindigkeiten „mittel“ (1.17 m/s) und „schnell“ (1.44 m/s) im oberen Bereich der Geschwindigkeitsskala, jedoch gleichauf mit dem Mittelwert aus 24. Die Vergleichbarkeit der Gehgeschwindigkeiten auf dem Laufband und aus den Versuchen beim freien Gehen wurde wiederum über die EStD-Dauer und deren Abweichung hergestellt.
Auswertung der KMS-Daten
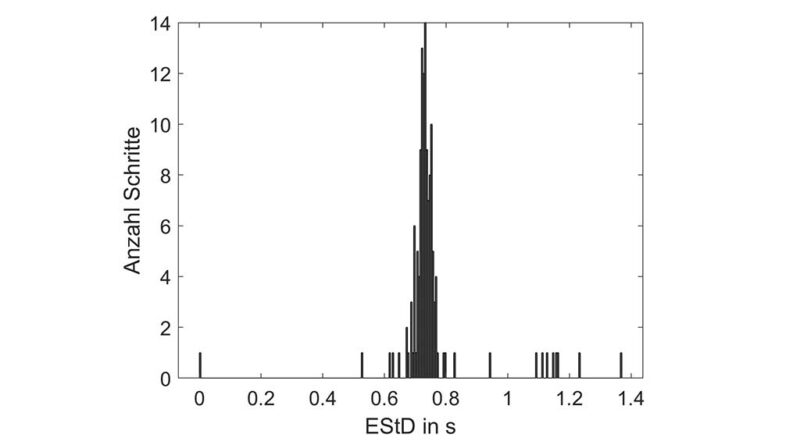
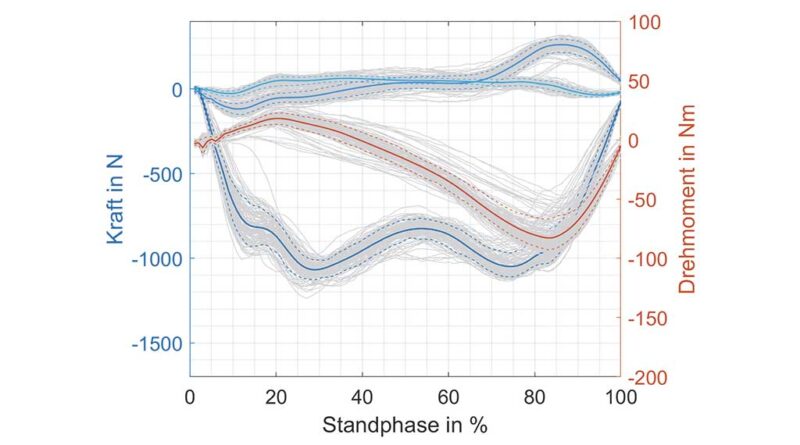
Die KMS-Daten konnten bis auf einen Datensatz (ESAR, Laufband, 1.17 m/s) ausgewertet werden. Im Histogramm (Abb. 5) sind beispielhaft die EStD dargestellt. Diese werden wiederum nach dem Maximum und dessen Verteilung bewertet. Die Einzelschritte, die dem Mittelwert und der Varianz der EStD entsprechen, wurden auf 100 % der Standphasen normalisiert und von den KMS-Daten der jeweilige Mittelwert sowie die Perzentile (+/- 90%) berechnet (Abb. 6). Bei einer Messdauer von mehr als 3 Minuten pro Messung ergeben sich somit zwischen 100 und 350 repräsentative Einzelschritte. Somit können z. B. Hinweise auf die Variabilität des Gangbildes gewonnen werden. Im Folgenden wurde die Korrelation der EStD zwischen dem Gehen auf dem Laufband sowie dem freien Gehen untersucht (Abb. 7). Die Auswertung zeigt eine sehr gute Korrelation der EStD zwischen dem Gehen auf dem Laufband und dem freien Gehen mit schneller (0.66 s +/- 0.01) und mittlerer Geschwindigkeit (0.75 s +/- 0.03). Beim Gehen mit langsamer Geschwindigkeit (1.17 s +/- 0.07) konnte unabhängig vom Prothesenfuß eine um bis zu 0.2 s schnellere EStD beim freien Gehen beobachtet werden. Dies lässt sich vermutlich mit der ineffizienten, langsamen Gehgeschwindigkeit auf dem Laufband begründen 25. Die Abweichung der Messdaten zur EStD auf dem Laufband und mit dem KMS liegt bei +/- 3 %.
Auswertung im Hinblick auf den individuellen Prothesenfuß
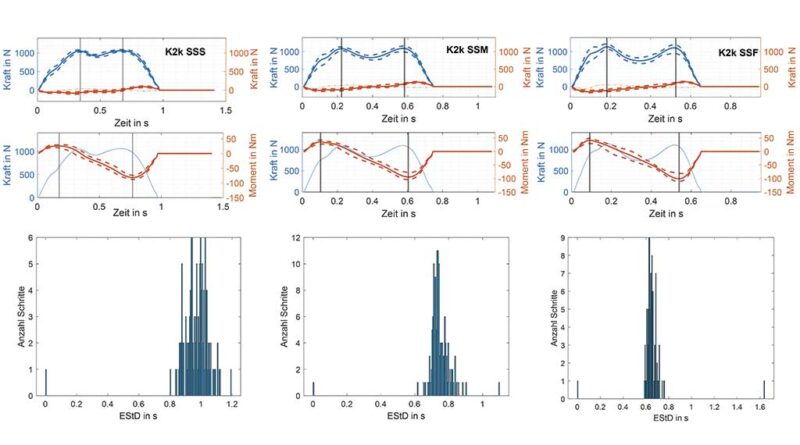
Die Auswertung zeigt, dass für eine Vergleichbarkeit der Kraft- und Momentendaten die Ausrichtung und exakte Positionierung des KMS relativ zum Prothesenfuß genau (+/- 1 mm, +/- 0.3°) dokumentiert werden muss. Dabei konnte während der Versuche insbesondere das Nachjustieren als im Nachgang nur schwer nachzuvollziehende Ungenauigkeit identifiziert werden. Als Hilfsmittel wurde somit ein zusätzliches Hilfsgerüst erstellt, das über Messlineale und ausrichtbare Linienlaser sowie einen digitalen Winkelmesser zur gewünschten Genauigkeit verhalf. Die Messung aller Geschwindigkeitsbereiche konnte mit dem K2k-Fuß durchgeführt werden; die ausgewerteten Messdaten sind in Abbildung 8 dargestellt. Es sei hierbei angemerkt, dass der Proband insbesondere beim schnellen Gehen Schwierigkeiten hatte, die Messung mit der gewünschten Dauer (> 3 min) durchzuführen. Auffällig ist die hohe Varianz des Drehmoments in der mittleren Standphase und der EStD sowie die Progression der anterioren/posterioren Kraft bei allen Geschwindigkeiten.
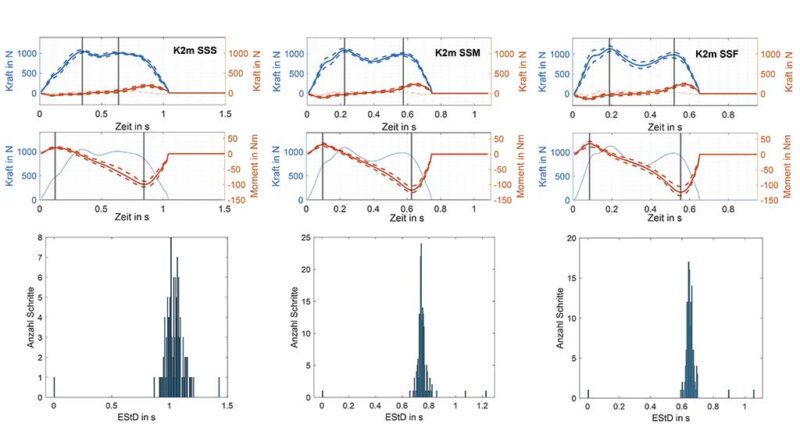
Die Histogramme der Messdaten des K2m-Fußes (Abb. 9) zeigen eine geringe Varianz der EStD beim mittleren und schnellen Gehen sowie eine Zunahme der anterioren/posterioren Kräfte bei höheren Gehgeschwindigkeiten.
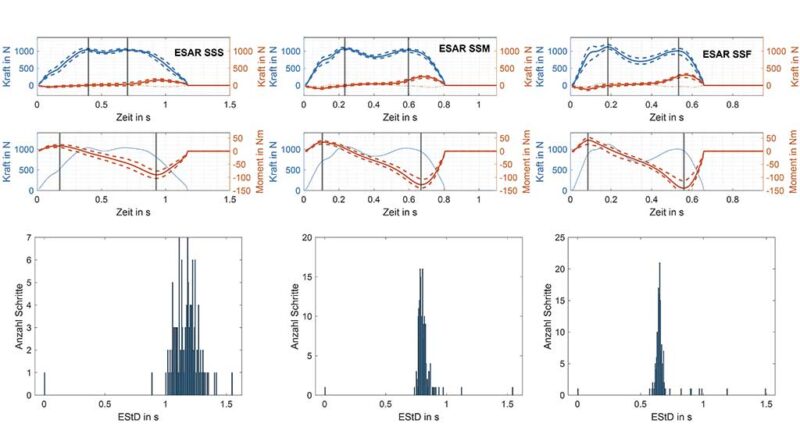
Die Messdaten des ESAR-Fußes (Abb. 10) weisen die gleiche Tendenz einer Zunahme der anterioren/posterioren Kräfte sowie einer geringeren Varianz der EStD auf, wie sie sich bereits beim K2m-Fuß zeigte.
Zusammengefasst lässt sich beobachten, dass bei den Prothesenfüßen mit flexiblen Vorfußfedern (K2m und ESAR) eine Abnahme der vertikalen Kraft (Fu2) von — 1 % bis — 4 % mit zunehmender Geschwindigkeit von „normal“ zu „schnell“ bei zugleich deutlich zunehmender (8 % bis 14 %) posterior wirkender Kraft vorliegt. Weiterhin weist der K2k-Fuß das höchste Fersenmoment sowie das geringste Vorfußmoment auf. Die Progression des Drehmoments und der anterioren/posterioren Kräfte scheint bei den flexibleren Füßen (K2m und ESAR) harmonischer als beim K2k-Fuß zu erfolgen.
Detaillierte Betrachtung der Maxima der KMS-Daten
Ein Vorteil des mobil getragenen Messsystems besteht darin, dass das gleiche Messsystem im Prothesenaufbau in unterschiedlichen Situationen getragen werden kann und dabei die gleiche Messqualität aufweist. Im hier vorgestellten Fall sollte mit Hilfe der Daten der Unterschied in der Kinetik zwischen dem freien Gehen und dem Gehen auf dem Laufband aufgezeigt werden. Dabei werden die Maxima der Kraft (Fu1) beim Fersenauftritt und nach der mittleren Standphase (Fu2) sowie die Minima bzw. Maxima der in anteriorer/posteriorer Richtung wirkenden Kräfte (Ff1 und Ff2) betrachtet. Weiterhin wird das maximale und das minimale Drehmoment (Mo1 und Mo2) ausgewertet, das zumeist zu einem anderen Zeitpunkt auftritt.
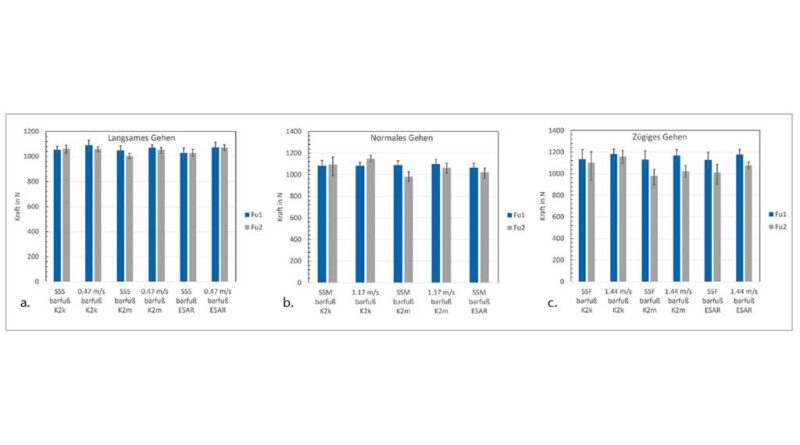
Beim langsamen Gehen ohne Schuhe kann beobachtet werden, dass die vertikalen Kräfte in ihrem Mittelwert zwischen Fu1 und Fu2 nur wenig voneinander abweichen (Abb. 11a). Hingegen kann beim normalen Gehen eine Abnahme des zweiten Kraftmaximums (Fu2) bei den flexibleren Füßen (K2m und ESAR) festgestellt werden (Abb. 11b). Im Vergleich dazu weist der K2k-Fuß eine Zunahme (1 %) auf. Analog zum langsamen Gehen weist der K2k-Fuß die höchste Abweichung vom Mittelwert beim Maximum der zweiten Kraftspitze (Fu2) auf. Beim zügigen Gehen bzw. bei 1.44 m/s Laufbandgeschwindigkeit kann der Trend der Abnahme des zweiten Maximums Fu2 weiterverfolgt werden (Abb. 11c). Das Kraftmaximum der Ferse Fu1 liegt in einem vergleichbaren Bereich zwischen allen Füßen.
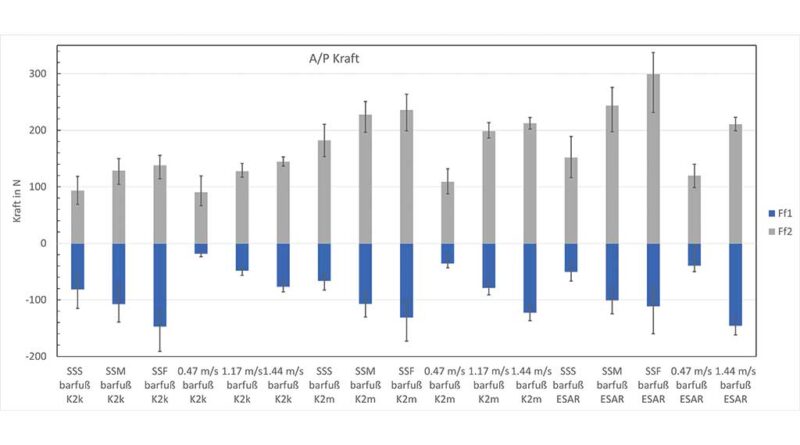
Bei den anterioren/posterioren Kräften (Abb. 12) kann beobachtet werden, dass eine reduzierte bremsende Kraft (Ff1) auf dem Laufband bei allen Füßen (- 22 % bis — 77 %) im Vergleich zum freien Gehen vorliegt. Dieser Effekt verstärkt sich mit abnehmender Gehgeschwindigkeit. Für den ESAR-Fuß kann beobachtet werden, dass für die Geschwindigkeiten SSS, SSM und SSF im Vergleich zum K2m-Fuß für die hohe Geschwindigkeit die Ff2-Kraft abnimmt (+ 20 %, — 7 % und — 21 %). Im Vergleich zum K2k-Fuß fällt in allen Geschwindigkeitsbereichen eine Reduktion der Ff2-Kraft auf (- 38 %, — 47 % und — 54 %). Zudem zeigt sich keine relative Zunahme der Kraft Ff2 beim K2m-Fuß von SSM zu SSF. Dies wurde auch in den Anwenderkommentaren geäußert, wonach der K2m-Fuß zwar sehr komfortabel beim langsamen Gehen sei, jedoch für hohe Geschwindigkeiten zu weich erscheine.
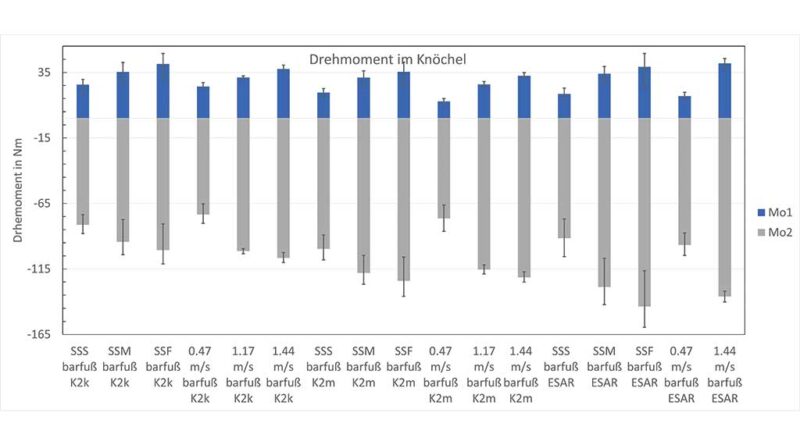
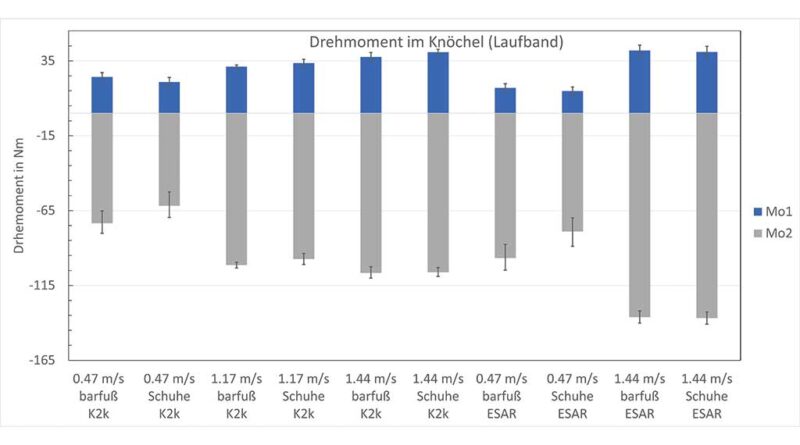
Beim Knöchelmoment ist ein ähnlicher Effekt beim Gehen auf dem Laufband gegenüber dem freien Gehen zu beobachten: Das Drehmoment auf dem Laufband fällt bei langsameren Geschwindigkeiten grundsätzlich geringer aus und nähert sich im Mittelwert bei mittleren und hohen Gehgeschwindigkeiten dem freien Gehen an (Abb. 13).
Zusammengefasst konnte mit dem KMS der Unterschied zwischen der Kinetik auf dem Laufband und dem freien Gehen aufgezeigt werden. Darüber hinaus konnten sowohl die Unterschiede in der Funktion verschiedener Prothesen bei Betrachtung der späten Standphase als auch die Unterschiede in der Variabilität bei Betrachtung der Geschwindigkeitsbereiche aufgezeigt werden.
Vergleich des Effekts von Schuhen
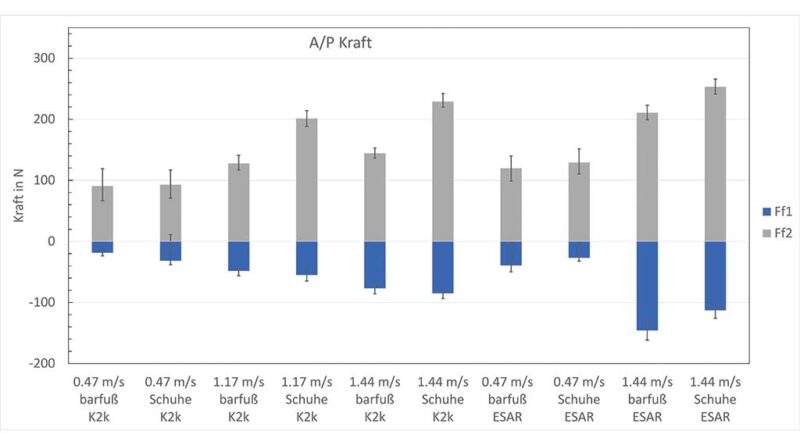
Zusätzlich wurden mit dem K2k- und dem ESAR-Fuß die Versuche auf dem Laufband auch mit Schuhen durchgeführt. Dabei wurde es erforderlich, den Prothesenfuß entsprechend der Schuhabsatzhöhe anzupassen. Die neue Ausrichtung des KMS wurde wiederum dokumentiert und bei der Berechnung der Kräfte und Momente mit einbezogen. Wie in Abbildung 14 dargestellt verhilft der Schuh beim K2k-Fuß zu einer deutlich höheren posterior gerichteten Kraft (+ 59 % Ff2); die bremsende Kraft (Ff1) auf der Ferse bleibt unverändert. Für den ESAR-Fuß kann die Tendenz einer Abnahme der Ff1-Kraft mit Schuh sowie nur eine geringe Zunahme bei den Zehen (+ 7 % Ff2) beobachtet werden. Hingegen kann (Abb. 15) beim langsamen Gehen beim K2k-Fuß im Vergleich zum ESAR-Fuß eine deutlich geringere Änderung des Drehmoments im Knöchel beim Gehen ohne und mit Schuhen festgestellt werden. Somit scheint der K2k-Fuß sich in seiner Mechanik trotz zusätzlicher Unterstützung durch die Schuhsohle nur geringfügig in seinem Abrollverhalten zu verändern. Beim flexibleren ESAR-Fuß kann hingegen beim langsamen Gehen eine deutliche Abnahme des Drehmoments auf dem Vorfuß beobachtet werden (-18 % Mo2). Dieser Effekt kann bei schnellem Gehen nicht festgestellt werden. Das Drehmoment der Ferse (Mo1) liegt wiederum im gleichen Bereich für beide Gehgeschwindigkeiten.
Zusammengefasst zeigt sich, dass der Schuh zwar einen Einfluss auf die Fußmechanik hat, dies aber gehgeschwindigkeitsabhängig erscheint. Der Einfluss ist also fuß- und schuhspezifisch und kann sich positiv (hier höhere posterior gerichtete Kraft beim K2k-Fuß) auswirken.
Fazit und Ausblick
Mittels des KMS konnte die unterschiedliche Funktion der drei verschiedenen Prothesenfüße in den drei Situationen „barfuß“, „in Schuhen beim freien Gehen“ und „auf dem Laufband“ nachvollzogen werden. Es konnte weiterhin die Wirkung der Gehgeschwindigkeit auf die Kinetik bei Betrachtung der Fußfunktion aufgezeigt werden. Weiterhin konnte dargestellt werden, dass das Gehen auf dem Laufband zwar nur bedingt dem freien Gehen entspricht (Reduktion der anterioren Kraft Ff1), dass dabei jedoch ein ähnliches Moment im Knöchelgelenk beim normalen und beim schnellen Gehen vorliegt. Letzteres ist ein Indikator für eine gleichartige Deformation des Federsystems, also der Funktion der Prothese. Bei Betrachtung des Barfußgehens gegenüber dem Gehen mit Schuhen zeigt sich wiederum, dass der Schuh die Prothesenfunktion deutlich beeinflussen kann (erhöhte Ff2-Kraft beim K2k-Fuß) und dass – abhängig vom Prothesenfuß und dessen Gestalt – die Schuhwahl sich auf das Messergebnis auswirkt.
Insbesondere für die Betrachtung des schnellen Gehens (0.66 s EStD) erwiesen sich die hohe Abtastrate (600 Hz, 660 Datenpunkte pro EStD) sowie die Genauigkeit des Messsystems als vorteilhaft. Da die Daten bereits im beweglichen Koordinatensystem des Prothesenbeins vorliegen, muss keine Umrechnung des Knöchelmoments erfolgen. Durch die statistische Auswertung, die hohe Zahl der Schritte und deren Abweichung können präzise Aussagen zu Durchschnitt und Abweichung davon getroffen werden. Fehleranfällig in der Anwendung zeigte sich hingegen der Aspekt, dass der Aufbau sehr genau dokumentiert werden muss, damit eine Vergleichbarkeit der Messdaten hergestellt werden kann.
Der zeitliche Aufwand zum Einrichten des KMS ist gegenüber einem optischen Kamerasystem deutlich geringer. Kommerziell erhältliche Sensoren übertrifft der vorgestellte KMS mit seiner geringeren Aufbauhöhe bei zugleich hoher Genauigkeit (+/- 1% FSO). Nachteilig ist die externe Datenaufzeichnung per Rucksack, die eine Kabelverbindung zum Sensor erfordert.
Mit der dargestellten Untersuchung kann gezeigt werden, dass die Anwendung des KMS in der Praxis aufgrund seiner Ergonomie (Einbau- und Ausrichtungstoleranzen) zwar komplex ist, jedoch detaillierte Einblicke in die Wechselwirkung von Prothese und Anwender erlaubt. Der KMS-Sensor dient dabei eher zur Untermauerung der Anwenderkommentare (z. B. „Der Fuß rollt kontrolliert von der Ferse auf die Zehen in allen Gehgeschwindigkeiten“) und liefert zusätzlich zu temporalen Daten z. B. von einem Laufband detaillierte Kinetikdaten. Die aktuellen Grenzen des Messsystems bestehen in der fehlenden Information über die Körperkinematik und die Kinetik der Beingegenseite. Unter der Annahme, dass eine erhöhte posterior wirkende Kraft bei später Vorfußbelastung mit einem hohen Knöcheldrehmoment vorliegt, kann auf eine erhöhte Gangsymmetrie und Balance 26 27 geschlossen werden. Eine Untermauerung dieser Annahme muss allerdings in größeren Validierungsstudien erfolgen.
Mobile Sensoreinlegesohlen sowie Inertialsensoren wären geeignet, zukünftig die fehlende Körperkinematik und Kinetik zu ergänzen, und würden somit einen umfassenderen Einblick in die Prothesenfunktion auch abseits des Bewegungslabors erlauben.
Abschließend kann das hier vorgestellte Sensorsystem als hilfreich für Entwickler von Prothesensystemen – z. B. bezüglich der differenzierten Betrachtung von Gangparametern im Hinblick auf Gestaltungsparameter – gewertet werden. Im klinischen Alltag können auf diese Weise komplexe Zusammenhänge oder auch Vorteile von Versorgungen dargelegt werden, ohne über ein Bewegungslabor verfügen zu müssen. Der zu erwartende Mehraufwand des Ein- und Ausbaus sowie der Auswertung und Interpretation der Messdaten im klinischen Alltag bleibt abzuwägen.
Für die Autoren:
Felix Starker
Engineer
Biomechanical Solutions
Össur hf.
Grjóthalsi 1
IS-110 Reykjavík
Island
fstarker@ossur.com
Begutachteter Beitrag/reviewed paper
Starker F, Verl A. Eignung eines mobilen Kraft- und Momentensensors in der Ganganalyse beim Vergleich verschiedener Prothesenfüße mit unterschiedlichen Gehgeschwindigkeiten. Orthopädie Technik, 2022; 73 (5): 66–75
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Konservative Versorgung einer adulten Skoliose mit einem modularen Bausatz – ein Versorgungsbeispiel — 6. März 2026
- Zahedi MS et al. Repeatability of kinetic and kinematic measurements in gait studies of the lower limb amputee. Prosthet Orthot Int, 1987; 11 (2): 55–64. doi: 10.3109/03093648709078179
- Frossard L et al. Load applied on osseointegrated implant by transfemoral bone-anchored prostheses fitted with state-of-the-art prosthetic components. Clin Biomech (Bristol, Avon), 2021; 89: 105457. doi:10.1016/j.clinbiomech.2021.105457. PMID: 34454327
- Fiedler G et al. Criterion and Construct Validity of Prosthesis-Integrated Measurement of Joint Moment Data in Persons With Transtibial Amputation. J Appl Biomech, 2014; 30 (3): 431–438. doi: 10.1123/jab.2013–0309
- Frossard L et al. Functional outcome of transfemoral amputees fitted with an osseointegrated fixation: Temporal gait characteristics. J Prosthet Orthot, 2010; 22 (1): 11–20. doi: 10.1097/JPO.0b013e3181ccc53d
- Frossard L et al. Categorization of activities of daily living of lower limb amputees during short-term use of a portable kinetic recording system: A preliminary study. J Prosthet Orthot, 2011; 23 (1): 2–11. doi: 10.1097/JPO.0b013e318207914c
- Ramos Gonzalez MDL. Biomechanical Analysis of Gait Kinetics Resulting from Use of a Vacuum Socket on a Transtibial Prosthesis. Bachelor Thesis, University of Nevada, Las Vegas (NV), 2014. https://digitalscholarship.unlv.edu/cgi/viewcontent.cgi?article=1014&context=honors_theses (Zugriff am 23.03.2022)
- Dumas R et al. Gait Analysis of Transfemoral Amputees: Errors in Inverse Dynamics Are Substantial and Depend on Prosthetic Design. IEEE Trans Neural Syst Rehabil Eng, 2017; 25 (6): 679–685. doi: 10.1109/TNSRE.2016.2601378
- Frossard L et al. Kinetics of Lower Limb Prosthesis: Automated Detection of Vertical Loading Rate. Prosthesis, 2019; 1 (1): 16–28. doi: 10.3390/prosthesis1010004
- Schuy J et al. Integrated measurement system for amputee gait analysis: A pilot study. IEEE Healthc Innov Conf HIC, 2014: 91–94. doi: 10.1109/HIC.2014.7038882
- Fiedler G et al. Criterion and Construct Validity of Prosthesis-Integrated Measurement of Joint Moment Data in Persons With Transtibial Amputation. J Appl Biomech, 2014; 30 (3): 431–438. doi: 10.1123/jab.2013–0309
- Batten HR, et al. Gait speed as an indicator of prosthetic walking potential following lower limb amputation. Prosthet Orthot Int, 2019; 43 (2): 196–203. doi: 10.1177/0309364618792723
- Hordacre B et al. Use of an activity monitor and GPS device to assess community activity and participation in transtibial amputees. Sensors (Switzerland), 2014; 14 (4): 5845–5859. doi: 10.3390/s140405845
- Sions JM et al. Differences in Physical Performance Measures Among Patients With Unilateral Lower-Limb Amputations Classified as Functional Level K3 Versus K4. Arch Phys Med Rehabil, 2018; 99 (7): 1333–1341. doi: 10.1016/j.apmr.2017.12.033
- Gailey RS et al. A Comparison of the Two-Minute Walk Test and Comprehensive High-level Activity Mobility Predictor (CHAMP) in People with a Leg Prosthesis. Clin Rehabil, 2021: 026921552110693. doi: 10.1177/02692155211069323
- Hansen AH et al. The human ankle during walking: implications for design of biomimetic ankle prostheses. J Biomech, 2004; 37 (10): 1467–1474. doi: 10.1016/j.jbiomech.2004.01.017
- Lee H et al. Summary of Human Ankle Mechanical Impedance during Walking. IEEE J Transl Eng Heal Med, 2016; 4. doi: 10.1109/JTEHM.2016.2601613
- Centers for Medicare and Medicaid Services, U. S. Department of Health and Human Services, HCFA. Common Procedure Coding System (HCPCS). Springfield (VA): US Department of Commerce, National Technical Information Service, 2001
- International Organization for Standardisation (ISO). ISO/TS 16955. Prosthetics – Quantification of physical parameters of ankle foot devices and foot units. Geneva: ISO, 2016
- International Organization for Standardisation (ISO). ISO/TR 22676:2006. Prosthetics – Testing of ankle-foot devices and foot units – Guidance on the application of the test loading conditions of ISO 22675 and on the design of appropriate test equipment. Geneva: ISO, 2006: 62
- Batten HR, et al. Gait speed as an indicator of prosthetic walking potential following lower limb amputation. Prosthet Orthot Int, 2019; 43 (2): 196–203. doi: 10.1177/0309364618792723
- Hordacre B et al. Use of an activity monitor and GPS device to assess community activity and participation in transtibial amputees. Sensors (Switzerland), 2014; 14 (4): 5845–5859. doi: 10.3390/s140405845
- Sions JM et al. Differences in Physical Performance Measures Among Patients With Unilateral Lower-Limb Amputations Classified as Functional Level K3 Versus K4. Arch Phys Med Rehabil, 2018; 99 (7): 1333–1341. doi: 10.1016/j.apmr.2017.12.033
- Gailey RS et al. A Comparison of the Two-Minute Walk Test and Comprehensive High-level Activity Mobility Predictor (CHAMP) in People with a Leg Prosthesis. Clin Rehabil, 2021: 026921552110693. doi: 10.1177/02692155211069323
- Batten HR, et al. Gait speed as an indicator of prosthetic walking potential following lower limb amputation. Prosthet Orthot Int, 2019; 43 (2): 196–203. doi: 10.1177/0309364618792723
- Ettema S et al. General estimates of the energy cost of walking in people with different levels and causes of lower-limb amputation: a systematic review and meta-analysis. Prosthet Orthot Int, 2021; 45 (5): 417–427. doi: 10.1097/PXR.0000000000000035
- Houdijk H et al. Energy storing and return prosthetic feet improve step length symmetry while preserving margins of stability in persons with transtibial amputation. J Neuroeng Rehabil, 2018; 15 (Suppl 1). doi: 10.1186/s12984-018‑0404‑9
- Runciman P et al. A novel pivot ankle/foot prosthesis reduces sound side loading and risk for osteoarthritis: a pragmatic randomized controlled trial. Prosthet Orthot Int, 2022. doi: 10.1097/PXR.0000000000000079. PMID: 35019886