Biologie nachbilden
Einer der ältesten Berichte über ein künstliches Bein wurde in einem sakralen indischen Buch mit dem Namen „Rigveda“ entdeckt. Dieses wurde etwa zwischen 3.500 und 1.800 v. Chr. verfasst und beschreibt die Versorgung von Königin Vishpla mit einem eisernen Bein 1. Seit dieser Zeit haben sich der Aufbau, das Material und die Funktionalität prothetischer Versorgungen der unteren Extremität deutlich verbessert. Eine weite Verbreitung haben passive Komponenten wie z. B. die sogenannten SACH-Füße. Diese Bezeichnung wird von dem englischen Begriff „solid ankle, cushioned heel“ abgeleitet und bedeutet, dass ein steifer, meist aus Holz bestehender Kern mit einer aus Gummi bestehenden Hülle kombiniert wird. Die weichere Hülle ist in der Lage, ähnlich dem Fersenpolster, Stöße beim Auftreten zu dämpfen. Ein nicht versteifter Vorfuß ermöglicht ein Abrollen über einen Drehpunkt, vergleichbar mit dem Zehengrundgelenk.
Zunehmend werden weitere biologische Wirkmechanismen durch technische Komponenten imitiert. Die Verwendung von Kohlenstofffasern in Prothesenfüßen ermöglicht eine Unterstützung im Gang durch einen elastischen Rückstoß, vergleichbar einer Achillessehne. Durch die Ausnutzung dieses Wirkungsprinzips können amputierte Spitzensportler ähnlich schnell rennen und weit springen wie Nichtamputierte 2. Dämpfer in Prothesenkniegelenken ermöglichen die Abbildung exzentrischer („unter Last kontrolliert nachgebender“) Muskelarbeit, insbesondere in der Schwungphase im Gang. Beim Vorschwung des Beines wird der Unterschenkel abgebremst, um einen harten Anschlag im Knie zu vermeiden. Kupplungsmechanismen blockieren Prothesenkniegelenke im Stand und vermeiden damit ein Kollabieren unter Belastung. Diese Funktion ist vergleichbar mit isometrischer („unter Last die Position haltender“) Muskelarbeitsweise. Durch das Umschalten zwischen der Dämpfung in der Schwungphase und der Blockade in der Standphase wird ein flüssiger Gang ermöglicht.
Zusätzlich zu rein passiven Prothesenkomponenten (ohne Elektronik) wurden kurz vor der Jahrtausendwende erste sogenannte semiaktive Prothesen eingeführt. Diese sind computergesteuert und besitzen Sensoren zur Erfassung des Ganges. Semiaktive Kniegelenke wie das C‑Leg der Firma Otto Bock erlauben eine Variation der Kniedämpfung und passen ihre Systemeigenschaften den Anforderungen an. Unter Zuhilfenahme der eingebauten Kraft- oder Inertialsensoren kann die Bewegungsabsicht identifiziert werden. So wird eine Anpassung der Dämpfung an verschiedene Gehgeschwindigkeiten, an Steigungen oder Treppen möglich. Zudem kann die Sensorik unvorhergesehene Situationen erkennen und damit die Sicherheit im Alltag erhöhen 3. All diese Entwicklungen haben das Gangbild der Amputierten näher an das natürliche Gangbild herangeführt. Jedoch war keines der Systeme in der Lage, konzentrische Muskelarbeit abzubilden. Dieses Wirkungsprinzip ist fundamental für den menschlichen Alltag. Es beschreibt die Verkürzung des Muskels zur Beugung oder Streckung eines Gelenks, wie zum Beispiel beim Anheben eines Gegenstandes (Armbeugemuskulatur) oder beim Aufstehen von einem Stuhl (Kniestreckermuskulatur).
Durch die konzentrische Muskelarbeit wird dem Körper Energie für die angestrebte Bewegung zugeführt. Im Gang wird diese am Sprunggelenk und an der Hüfte benötigt, um den Körper in Bewegung zu versetzen und Energieverluste auszugleichen. Zum Steigen von Treppen und zum Begehen von Steigungen muss nicht nur das Sprunggelenk, sondern auch das Kniegelenk Energie zum Anheben des eigenen Körpers zuführen. Zur Umsetzung dieser Funktionalität ist ein Antrieb nötig, der einen Energieeintrag ermöglicht und damit die konzentrische Funktionsweise von Muskelfasern nachbilden kann. Als Antriebsmechanismus könnten pneumatische Systeme, die mit Luftdruck, oder hydraulische Systeme, die mit Flüssigkeitsdruck arbeiten, eingesetzt werden. Durch vereinfachte Bedingungen hinsichtlich der Regelung, des Gewichts und auch aus Platzgründen haben sich allerdings batteriebetriebene Elektromotoren als Antriebskonzept durchgesetzt.
Motoren in der Beinprothetik
Bereits in den 80er Jahren wurde ein erster motorgetriebener Forschungsprototyp, das sogenannte Belgrad-Knie, entwickelt. Zu dieser Zeit waren die Systembauteile zur Stromversorgung und die Computer zur Steuerung noch zu groß und wurden deshalb neben dem Prototyp aufgebaut 4. Ein erstes mobiles System war der „Proprio“-Fuß der isländischen Firma Össur. Dieser hat einen kleinen integrierten Elektromotor, der das Anheben der Fußspitze im Vorschwung des Beines ermöglicht. Aufgrund begrenzter Motorleistung ermöglicht dieses System jedoch keinen aktiven Fußabdruck vom Boden, wie er durch die Wadenmuskulatur bei einem Nichtamputierten möglich ist.
Ein weiteres aktives Prothesensystem wurde 2006 ebenfalls durch die Firma Össur eingeführt: Das „Power Knee“ ist die erste aktive Prothese, die den Alltag von Oberschenkelamputierten vereinfachen soll. Ein Unterstützungsmodus für das Aufstehen, das Treppensteigen und auch für den ebenen Gang wurde in dessen Steuerung integriert. Bis jetzt hat dieses System jedoch noch keine weite Verbreitung. Gründe dafür können die Kosten in Höhe von mehreren zehntausend Euro, aber auch Kriterien wie das Prothesengewicht, die Batterielaufzeit oder die Funktionsweise sein. Häufig verbreitete Sturzangst 5 kann zudem die Anwender dazu bewegen, bei ihren gewohnten Systemen zu verbleiben.
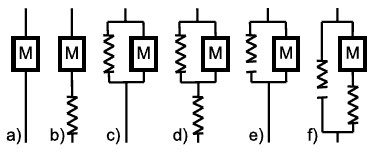
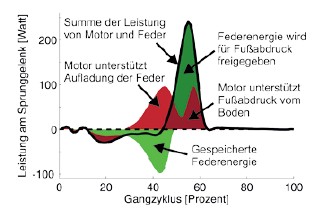
Seit Anfang dieses Jahrtausends gibt es besonders in den USA verschiedene Entwicklungen im Bereich der motorgetriebenen Beinprothetik. Ein Hauptproblem bei der Umsetzung ist die aktuelle Motorentechnologie: Es gibt derzeit keinen Elektromotor, der vergleichbar schnell beschleunigt und dabei genauso viel Kraft aufbringen kann wie die menschliche Wadenmuskulatur. Entsprechend müssen alternative Lösungswege zum direkten Antrieb mit Motor (Abb. 1a) gefunden werden. Dabei lassen sich die Wissenschaftler und Ingenieure von biologischen Prinzipien inspirieren: Die biologischen Antriebe, unsere Muskeln, greifen auf elastische Strukturen zurück, um die Anforderungen an die Muskelfasern zu reduzieren. Zum Beispiel trägt am Sprunggelenk die Achillessehne zur deutlichen Erhöhung der Spitzenleistung der Muskelfasern bei 6. Die Leistung ist dabei das Maß, das den Zusammenhang von aufgebrachter Muskelkraft und damit einhergehender Bewegungsgeschwindigkeit beschreibt. Eine Leistungssteigerung durch einen Federmechanismus, vergleichbar mit der Achillessehne, wäre auch für einen technischen Aufbau vorstellbar (Abb. 2).
Für eine Übertragung des Wirkungsprinzips muss die Anordnung von Elektromotor und Feder evaluiert werden. Hier hat sich in Computersimulationen herausgestellt, dass eine serielle Anordnung beider Elemente sowohl die Spitzenleistung als auch den Energieverbrauch eines Elektromotors deutlich reduzieren kann (Abb. 1b). Im Vergleich dazu können bei einer parallelen Anordnung (Abb. 1c) von Motor und Feder weitere Reduktionen der Spitzenleistung erzielt werden; allerdings wird der Energieverbrauch dabei deutlich weniger reduziert. Eine Kombination von Federn in Serie und parallel zum Motor (Abb. 1d) würde die Vorteile und auch Nachteile beider Konfigurationen vereinen 7. Um die Nachteile der parallelen Feder für bestimmte Bewegungen zu verringern, kann diese auch unidirektional angeordnet werden (Abb. 1e u. f). Das bedeutet, dass die Feder erst ab einem gewissen Winkel, z. B. dem Sprunggelenkswinkel im Stand, unter Last gesetzt wird. Weitere mögliche Anordnungen und Kombinationen können ebenso Dämpfer oder auch Kupplungen zur Blockade des Gelenkes mit einbinden. Mit zunehmender Komplexität der technischen Lösung nehmen allerdings in den meisten Fällen das Gewicht und der Bauraum für den aktiven Prothesenfuß zu.
In Computersimulationen wurde berechnet, dass je nach Gangart (Gehen oder Rennen) und Fortbewegungsgeschwindigkeit unterschiedliche Steifigkeiten erforderlich wären, um größtmögliche Einsparungen für den Motor zu erhalten 8. Dies spricht für einen Mechanismus, der vergleichbar mit der Biologie seine Steifigkeit einstellen kann. Nachteilig wären hier wiederum der zusätzliche Bauraum und das Gewicht für solch einen Aufbau. Daher werden aktuell die aktiven Systeme für die häufigste Bewegungsform, das ebene Gehen mit mittlerer Geschwindigkeit, optimiert. Insbesondere nichtvariable Größen wie die Federsteifigkeit, die Dämpfung oder der Auslösewinkel der unidirektionalen Federn bringen dadurch oft energetische Nachteile für andere Bewegungsformen oder Geschwindigkeiten mit sich. Funktional kann aber durch die geschickte Anordnung von Feder und Elektromotor sowohl die Kraft als auch die damit verbundene Verkürzungsgeschwindigkeit der Wadenmuskulatur mit aktuell erhältlicher Technologie nachempfunden werden.
Aufbauend auf diesen Prinzipien wurde 2007 an der Arizona State University in den USA der „Sparky“-Fuß entwickelt. In der Folge wurde der Prototyp durch die Firma SpringActive weiterentwickelt. Der „Odyssey“-Fuß (Abb. 3), der „Walk-Run“-Fuß (Abb. 4) und eine Kombination beider Systeme (Abb. 5) sind die jüngsten Entwicklungsschritte. Der „Walk-Run“-Fuß ist ein Prototyp zur Erforschung erweiterter Anforderungen wie zum Beispiel des motorgetriebenen Rennens 9. Durch eine umfassendere Sensorik bietet er mehr Möglichkeiten bei der Gestaltung von Steuerungsalgorithmen. Eine Kombination aus den Stärken aller drei Prototypen soll mit Hilfe der Firma Össur den Weg zum Anwender finden. Vergleichbare Systeme werden in einer Kooperation der Vanderbilt University mit der Firma Freedom Innovations 10, dem Massachusetts Institute of Technology (MIT) und der Firma BionX Medical Technologies entwickelt 11. Der erste für den Anwender erhältliche Prothesenfuß mit aktivem Abdruck vom Boden wurde 2014 von der amerikanischen Firma BionX am Markt eingeführt und wird aktuell über Otto Bock in Deutschland unter dem Namen „BiOM“ vertrieben. Mit dem „emPOWER“-Fuß (Abb. 6) wird aktuell auf ein deutlich kompakteres Nachfolgemodell umgestellt.
Prothesensteuerung
Neben dem mechanischen Konzept einer aktiven Beinprothese ist die Steuerung ein wichtiges Merkmal, das die Funktion definiert. Drei grundlegende Ebenen müssen durch die eingebaute Sensorik erkannt werden:
- Bewegungsabsicht erkennen: Das Prothesensystem muss die Absicht des Nutzers erkennen. Eine Unterscheidung von z. B. Sitzen, Stehen, Gehen oder Rennen muss durch die Steuerung vorgenommen werden. Aber auch Steigungen oder Treppen müssen erkannt werden, um den Elektromotor entsprechend der geforderten Bewegung anzusteuern.
- Geschwindigkeit oder Neigung erkennen: Neben der Bewegungsabsicht muss auch die gewünschte Bewegungsgeschwindigkeit detektiert werden. Dies beinhaltet sowohl das Beschleunigen als auch das Abbremsen mit der Prothese. Eine Erkennung der Neigung von Treppen oder Ebenen ist für eine optimale Bewegungsunterstützung im Alltag notwendig.
- Bewegungsphase erfassen: Wenn die Bewegungsabsicht und die Bewegungsgeschwindigkeit durch die Sensoren erkannt wurden, muss noch die Bewegungsphase erfasst werden. Durch eine Erkennung der Phasen kann der Elektromotor das künstliche Gelenk entsprechend der gewünschten Anforderung beugen oder strecken. Neben diesem mehrstufigen Erkennungsprinzip gibt es auch verschiedene Ansätze, die versuchen, die Steuerung allgemeingültig und unabhängig von der Umgebung und der Bewegungsabsicht aufzubauen. In einem den menschlichen Reflexen nachempfundenen Ansatz („BiOM“-Fuß) werden, vergleichbar mit den biologischen Sensoren der Muskelspindeln oder des Golgi-Sehnenorgans, Kraft und Längenwerte über Sensoren erfasst und diese über Modelle in eine Motorposition umgerechnet 12.
Erste Erfahrungen
Erste Studien haben gezeigt, dass ein Gehen mit aktivem Prothesenfuß weniger anstrengend ist als mit einem passiven System 13. Die Wirkung ist vergleichbar mit einem Elektrofahrrad, das den Radfahrer in seiner Tretbewegung elektrisch unterstützt. Durch die energetische Unterstützung erhöht sich zudem die Ganggeschwindigkeit der Träger 14. Anwender zeigen eine höhere Nutzerzufriedenheit als mit passiven Carbonfüßen. Allerdings scheint noch Potenzial für weitere Entwicklungsschritte vorhanden zu sein: Tests mit Unterschenkelamputierten haben gezeigt, dass bestehende Asymmetrien im Gangmuster zwar reduziert, aber nicht auf das Niveau einer nichtamputierten Vergleichsgruppe gebracht werden können 15. Dies kann verschiedene Ursachen haben: Einerseits wird vermutet, dass bestehende fehlerhafte Bewegungsmuster nur schwer verlernt werden können. Andererseits wurden auch noch nicht alle biologischen Wirkprinzipien in dem System umgesetzt. Aktuell werden die aktiven Prothesenfüße durch einen Motor am Sprunggelenk bewegt. In der Biologie gibt es Muskeln, die über mehrere Gelenke ziehen. Dadurch wird die Bewegung der Hüfte, des Knies und des Sprunggelenks miteinander verkoppelt. Dies kann Vorteile für die Bewegungskontrolle und die Energiebereitstellung mit sich bringen. Dieser Ansatz muss in den nächsten Jahren auf sein Potenzial zur Verbesserung des Gangbildes untersucht werden.
Weiterführende Entwicklungen
Nachdem die ersten technischen Lösungen für motorisierte prothetische Sprunggelenke erfolgreich getestet wurden, gilt es nun weiter an der Nutzerfreundlichkeit zu arbeiten. Erste wasserdichte Prototypen werden entwickelt, um einen Ausfall bei Feuchtigkeit zu vermeiden. Zudem versucht man, die Geräuschemission der Motoren und aller weiteren mechanischen Komponenten zu reduzieren. Dies kann einerseits durch effizientere Bauteile oder Dämmung des Gehäuses realisiert werden. Andererseits haben auch erste Studien ein erhebliches Potenzial auf Seiten der Motoransteuerung gezeigt 16. Allerdings ist davon auszugehen, dass die aktiven Systeme nie vollständig geräuschfrei sein werden. Nutzer dürfen daher keine Aversion gegenüber den Systemgeräuschen haben. Ein Geräuschdesign zur positiveren Wahrnehmung wie bei Kraftfahrzeugen ist denkbar. Zudem werden Mitmenschen die Prothesengeräusche zum Teil wahrnehmen können. Dies bedarf einer aufgeschlossenen Haltung der Nutzer in Bezug auf die öffentliche Kenntnisnahme der Amputation. Es wird interessant sein, wie sich die Inklusion dieser bionischen Konzepte im Lebensalltag und das damit verbundene Selbstverständnis sowohl auf Seiten der Nutzer als auch auf Seiten der Mitmenschen entwickelt. Öffentliche Veranstaltungen wie der 2016 in Zürich ausgetragene „Cybathlon“ (www.cybathlon. ethz.ch) können dazu beitragen, diesen Prozess anzuregen.
Der Energieverbrauch ist ein weiterer Punkt, den es zu verbessern gilt. Ein Erwachsener legt im Alltag täglich etwa 6.500 Schritte zurück 17. Das sind 3.250 Schritte pro Bein. Der „Walk-Run“-Fuß würde für diese Distanz beim Gehen mit 4 km/h eine Batterie mit einem Gewicht von etwa 300 Gramm benötigen. Steigungen, Treppen oder auch höhere Geschwindigkeiten können diesen Wert deutlich heraufsetzen. Bei einer Unterschenkelamputation auf etwa 0,3 m Höhe fehlt einer 80 kg schweren und 1,75 m großen Person etwa 2,8 kg an Beinmasse. Eine aktive Prothese wiegt etwa 2 kg. In Kombination mit Batterie (0,3 kg), Adaptern, Schaft und Liner (etwa 1,2 kg) wird damit das Gewicht des amputierten Beinanteils überschritten. Es gilt Ansätze zu finden, um das Gewicht aller für die Versorgung benötigten Komponenten weiter zu reduzieren und damit einen höheren Tragekomfort zu gewährleisten.
Vergleichbar mit Nichtamputierten gibt es individuelle Unterschiede beim Gang von Amputierten. Eine individualisierte Steuerung im Gangzyklus könnte eine weitere Verbesserung des Bewegungsverhaltens der Nutzer mit sich bringen. Zukünftig sollen Schnittstellen zwischen dem menschlichen Gehirn und den Prothesen helfen, die Steuerung noch intuitiver zu gestalten. Erste Schritte in diese Richtung werden über das Abgreifen elektromyografischer Signale unternommen 18. Diese sind für die Aktivierung unserer Muskulatur verantwortlich und können über Elektroden auf oder auch unter der Haut erfasst werden. Im Bereich der Arm- und Handprothetik sind bereits erste myoelektrisch gesteuerte Systeme auf dem Markt. Die Signale können dabei zum Öffnen und Schließen der Hand sowie zum Drehen des Handgelenks genutzt werden. Ein Umschalten zwischen verschiedenen Griffarten ist möglich 19.
Im Vergleich zu passiven Prothesen können aktive Systeme deutlich mehr Funktionen bieten. Da die Komplexität hinsichtlich der Hardwarebestandteile und der Bewegungskontrolle ausgehend von passiven über die semiaktiven bis hin zu den aktiven Prothesen immer weiter zugenommen hat, ist es fraglich, inwieweit einige Nutzer im Umgang überfordert werden können. Da Sturzvermeidung im Alltag von höchster Relevanz ist, kann durchaus ein einfaches Bedienungskonzept Vorrang gegenüber mehr Funktionen haben. Einfache passive Konzepte sind zudem günstiger, benötigen meist weniger Wartung und keinerlei Stromquellen, was die Autonomie fördert. Insbesondere für ältere Nutzer könnte die Vielfalt der Möglichkeiten für den Umgang im Alltag problematisch sein. Aufgrund der altersbedingten Abnahme der körperlichen Leistungsfähigkeit würden Ältere jedoch am stärksten von der energetischen Unterstützung profitieren. Um diesen Konflikt aufzulösen, könnten Funktionalitäten stufenartig im Lernprozess freigeschaltet werden.
Aktuell steckt die aktive Prothetik noch in den Kinderschuhen. Grundlagen sind gelegt, viele Eigenschaften können noch verbessert werden. Wie in den ersten Abschnitten beschrieben, sind aktuell erst drei aktive Systeme, zwei Füße und ein Knie für den Anwender erhältlich. Und auch wenn der Vergleich etwas weit hergeholt erscheint: Erste Automobile fuhren auch nicht unbedingt schneller als Pferdekutschen. Je nach Anforderungsprofil konnten diese aber durchaus Vorteile im Alltag bieten.
Motoren für jedermann
Seit einigen Jahren gibt es erste Entwicklungen, um bionische Beinkonzepte auch für andere Anwendergruppen nutzbar zu machen. Aktuell werden Laufsysteme, sogenannte Exoskelette, für die Gangrehabilitation von Querschnittgelähmten oder Schlaganfallpatienten eingesetzt. Diese motori sierten Stützsysteme sind parallel zum Bein angebracht und werden durch vergleichbare Prinzipien wie in der aktiven Prothetik gesteuert. Beispiele hierfür sind das „Ekso“-System der Firma EksoBionics oder das „ReWalk“-System der Firma Argo Medical Technologies. Diese Systeme werden aktuell primär in Rehabilitationseinrichtungen eingesetzt. Zukünftig ist es vorstellbar, dass Exoskelette die Rolle der Rollstühle im Alltag, je nach Krankheitsbild, teilweise oder vollständig ersetzen. Erste Pilotprojekte zur Heimanwendung werden derzeitig durchgeführt.
Neben diesen relativ schweren Systemen gibt es noch einen zweiten Entwicklungstrend: Leichte und portable sogenannte Exosuits (Abb. 7) ergänzen einzelne Gelenke am Bein durch eine Aktuatorik. Dabei werden die Motoren in einer Art Gürteltasche an der Hüfte angebracht. Bowdenzüge, vergleichbar mit denen einer Fahrradbremse, übertragen die Bewegung der Motoren auf die Gelenke. Durch die Verwendung von auf Textilien basierenden Schnittstellen mit dem Menschen wird kein zusätzliches schweres Stützsystem zur Führung der Bewegung benötigt. Dies schränkt die Beweglichkeit im Alltag weniger ein. Zusätzlich wird das Gewicht am Bein reduziert, was den Trageaufwand für den Anwender herabsetzt. Exosuits können zukünftig zur Rehabilitation und auch zur alltäglichen Unterstützung von Nutzergruppen mit Einschränkungen im Bereich der Atmung, der Muskulatur oder des Herz-Kreislauf-Systems eingesetzt werden. Ein Einsatz bei neurologischen Störungen wie Lähmungen ist denkbar. Neben diesen Patientengruppen können solche Gangassistenzsysteme auch die Mobilität von Senioren erhöhen und damit die Selbstständigkeit dieser Zielgruppe fördern. Wie bei einem Elektrofahrrad kann der Fortbewegungsaufwand reduziert werden 20 Anwendungen für jüngere Nutzer sind im Freizeitbereich denkbar.
Mit den seit der Jahrtausendwende entwickelten bionischen Beinkonzepten wurden wegweisende Grundlagen für Gangassistenzsysteme geschaffen, die zukünftig die Lebensqualität einer breiten Anwendergruppe sowohl mit als auch ohne Amputation verbessern können.
Der Autor:
Dr. rer. nat. Martin Grimmer
ETH Zürich
Sensory-Motor Systems Lab
Tannenstrasse 1
CH-8092 Zürich, Schweiz
martin.grimmer@hest.ethz.ch
Begutachteter Beitrag/reviewed paper
Grimmer M. Aktiv in die Zukunft schreiten — Auf den Spuren der weltweit ersten motorgetriebenen Beinprothesen. Orthopädie Technik, 2017; 67 (3): 44–49





- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Duraiswami PK, Orth M, Tuli SM. 5000 years of orthopaedics in India. Clinical Orthopaedics and Related Research, 1971; 75: 269–280
- Wank V, Keppler V. Vor- und Na]chteile von Sportlern mit Hochleistungsprothesen im Vergleich zu nichtbehinderten Athleten. Deutsche Zeitschrift für Sportmedizin, 2015; 66: 287–293
- Blumentritt S, Schmalz T, Jarasch R. The safety of C‑Leg: biomechanical tests. Journal of Prosthetics and Orthotics, 2009; 21 (1): 2–15
- Popovic D, Tomovic R, Tepavac D, Schwirtlich L. Control aspects of active above-knee prosthesis. International Journal of Man-Machine Studies, 1991; 35 (6): 751–767
- Miller WC, Speechley M, Deathe B. The prevalence and risk factors of falling and fear of falling among lower extremity amputees. Archives of Physical Medicine and Rehabilitation, 2001; 82 (8): 1031–1037
- Farris DJ, Sawicki GS. Human medial gastrocnemius forcevelocity behavior shifts with locomotion speed and gait. Proceedings of the National Academy of Sciences, 2012; 109 (3): 977–982
- Grimmer M, Eslamy M, Gliech S, Seyfarth A. A comparison of parallel- and series elastic elements in an actuator for mimicking human ankle joint in walking and running. IEEE International Conference on Robotics and Automation (ICRA), 2012: 2463–2470
- Grimmer M, Eslamy M, Seyfarth A. Energetic and peak power advantages of series elastic actuators in an actuated prosthetic leg for walking and running. Actuators MDPI, 2014; 3 (1): 1–19
- Grimmer M, Holgate M, Holgate R, Boehler A, Ward J, Hollander K, Sugar T, Seyfarth A. A powered prosthetic ankle joint for walking and running. Biomedical Engineering Online, 2016; 15 (Suppl 3): 141. doi: 0.1186/s12938-016‑0286‑7
- Lawson B, Varol HA, Huff A, Erdemir E, Goldfarb M. Control of stair ascent and descent with a powered transfemoral prosthesis. Transactions on Neural Systems and Rehabilitation Engineering IEEE, 2013; 21 (3): 466–473
- Au S, Weber J, Herr H. Powered Ankle-Foot Prosthesis Improves Walking Metabolic Economy. IEEE Transactions on Robotics, 2009; 25 (1): 51–66
- Markowitz J, Krishnaswamy P, Eilenberg MF, Endo K, Barnhart C, Herr H. Speed adaptation in a powered transtibial prosthesis controlled with a neuromuscular model. Philosophical Transactions of the Royal Society of London B: Biological Sciences, 2011; 366 (1570): 1621–1631
- Au S, Weber J, Herr H. Powered Ankle-Foot Prosthesis Improves Walking Metabolic Economy. IEEE Transactions on Robotics, 2009; 25 (1): 51–66
- Herr H, Grabowski A. Bionic ankle-foot prosthesis normalizes walking gait for persons with leg amputation. Proceedings of the Royal Society B: Biological Sciences, 2012; 279 (1728): 457–464
- Ferris AE, Aldridge JM, Rábago CA, Wilken JM. Evaluation of a powered ankle-foot prosthetic system during walking. Archives of Physical Medicine and Rehabilitation, 2012; 93 (11): 1911–1918
- Grimmer M. Powered Lower Limb Prostheses – Angetriebene Prothesen für die untere Extremität. Dissertation, Technische Universität Darmstadt, 2015. http://tuprints.ulb.tudarmstadt.de/4382 (Zugriff am 30.01.2017).
- Tudor-Locke C, Bassett J. How many steps/day are enough?: Preliminary pedometer indices for public health. Sports Medicine, 2004; 34 (1): 1–8.
- Grimmer M. Powered Lower Limb Prostheses – Angetriebene Prothesen für die untere Extremität. Dissertation, Technische Universität Darmstadt, 2015. http://tuprints.ulb.tudarmstadt.de/4382 (Zugriff am 30.01.2017).
- Belter JT, Segil JL. Mechanical design and performance specifications of anthropomorphic prosthetic hands: a review. Journal of Rehabilitation Research and Development, 2013; 50 (5): 599–618
- Grimmer M, Lee S, Quinlivan BT, Malcolm P, Rossi DM, Siviy C, Walsh CJ. Comparison of Ankle Moment Inspired and Ankle Positive Power Inspired Controllers for a Multi-articular Soft Exosuit for Walking Assistance. In: González-Vargas J, Ibáñez J, Contreras-Vidal JL, van der Kooij H, Pons JL (eds). Wearable Robotics: Challenges and Trends. Proceedings of the 2nd International Symposium on Wearable Robotics. Berlin: Springer Verlag, 2016: 337–341.
