Einleitung
Mit Einführung der tuber- und ramusumgreifenden Schafttechniken wurde zunehmend auf die anatomischen Gegebenheiten bei der Herstellung transfemoraler Prothesenschäfte geachtet. Nicht nur funktionale Aspekte wie Bewegungsfreiheit, Kraftübertragung und Führungseigenschaften, sondern auch Vektorenmaße und muskuläre Verspannung sind wichtige Kriterien für eine moderne Schaftgestaltung. Der Prothesenschaft muss sowohl in der Schwungals auch in der Standphase wichtige Kriterien erfüllen, um ein beschwerdefreies Gehen und Stehen zu gewährleisten. Aber auch Aspekte wie Sitzen und Radfahren sind nicht zu unterschätzen. Doch welches Schaftsystem gewährt in allen Situationen die richtige Unterstützung, und was sind unabdingbare Kriterien dafür? Sicherlich sind diese Fragen in der Vergangenheit auch Denkanstöße zur Entwicklung von Prothesenschaftformen gewesen.
Bestimmung des Ramuswinkels
Der Ramus dient in modernen Schäften primär der Führung oder bei schwacher Muskulatur der Stabilisierung im Prothesenschaft. Eine Lastaufnahme von distal am Tuber ist vor dem Hintergrund physiologischerer Schaftformkonzepte zunehmend weniger gewünscht und zweckmäßig. Trotzdem muss und wird dem Ramuswinkel große Bedeutung beigemessen. Das gilt für alle tuber- und ramusumgreifenden Schaftsysteme. Jedoch sind nur wenige Betriebe in der Lage, auf bildgebende Diagnostik zurückzugreifen, die eine nahezu eindeutige Messung ermöglicht. Der Großteil aller orthopädietechnischen Werkstätten und somit der ausführenden Berufsgruppe der Orthopädie-Techniker ist somit auf den Einsatz manueller Messwerkzeuge angewiesen. Seien es selbstgebaute oder durch die Industrie angebotene Werkzeuge – es obliegt dem Techniker, den Ramuswinkel nach bestem Gewissen zu bestimmen. Doch genau dort liegt aus Sicht des Verfassers die Schwierigkeit: Der richtige Umgang mit den Messwerkzeugen und die damit verbundene Anwendung am Menschen stellen viele Techniker vor große Herausforderungen. Geprägt ist dieser Eindruck durch jahrelange Seminartätigkeit des Verfassers im Bereich der Schafttechnologien.
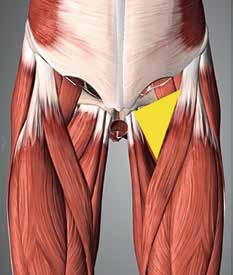
Doch worin genau besteht die Schwierigkeit? Die Werkzeuge messen nur so gut wie die Menschen, die sie bedienen. Schaut man sich den Bereich um den Ramus genauer an, liegt dort viel Muskulatur, die das Messen erschwert (Abb. 1). Muskeln wie der M. transversus perinei superficialis bzw. profundus, der M. adductor magnus, der M. semimembranosus, der Biceps femoris sowie der M. gluteus maximus können das Ergebnis beeinflussen. Hinzu kommt die polsternde Fettschicht, die bei dem einen Menschen etwas dicker und bei dem anderen etwas dünner ausfällt.
An dieser Stelle sei gesagt, dass es verständlich ist, dass die Bestimmung des Ramuswinkels oft eine Herausforderung darstellt. Nichtsdestotrotz ist der Ramuswinkel eine unabdingbar wichtige Größe für die Herstellung eines ramusumgreifenden Prothesenschaftes. Basierend auf eigenen Entwicklungen und persönlichen Erfahrungen im Bereich der Schafttechnologien stellt sich somit folgende Frage: Gibt es alternative Möglichkeiten zur Bestimmung des Ramuswinkels, ohne denselben messen zu müssen? Damit wäre man unabhängiger von der Erfahrung und den Messfehlern bei der Winkelbestimmung.
Rechnerische Ermittlung des Ramuswinkels
Nach eingehender Betrachtung verschiedener ramusumgreifender Schafttechniken stellte sich für den Autor eine wiederkehrende Verhältnismäßigkeit dar, die zu folgender Annahme führte: Der Ramuswinkel und die Fläche des Scarpa-Dreiecks stehen in einem Winkel von 100° zueinander. Um diesen Sachverhalt zu bestätigen, wurden 30 ramusumgreifende Schäfte (M.A.S., Bufa Anatomical Socket und TFSM) durchgemessen, was den Eindruck unterstrich und somit die Behauptung einer wiederkehrenden Verhältnismäßigkeit stützte, unabhängig vom Techniker und der Schaftart.
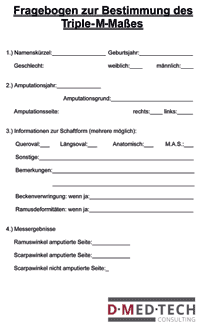
Auf der Basis dieser Erkenntnis lässt sich folgende Hypothese aufstellen: Der Ramuswinkel ist rechnerisch zu ermitteln, ohne ihn direkt zu messen. Zur Untersuchung der Hypothese wurden ein Messprotokoll und ein Fragebogen (Abb. 2) entwickelt, die relevante Fragen und Messergebnisse umfassten. Das Messprotokoll legte fest, wo und wie gemessen werden sollte.
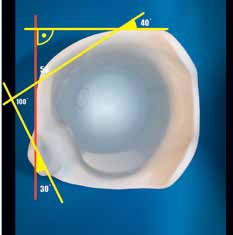
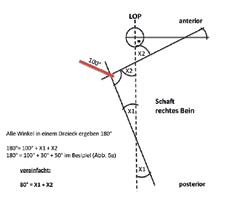
Die untersuchten Prothesenanwender wurden alle sitzend vermessen. Das Gesäß musste auf einer festen Oberfläche Halt finden; Oberschenkel und Stumpf durften nicht mehr aufliegen. Der Winkel in Hüft- und Kniegelenk sollte nahezu 90° betragen. Ferner sollte keine Außen- oder Innenrotation im Hüftgelenk vorliegen. Gemessen wurde die Fläche des Scarpa-Dreiecks in Bezug zur Waagerechten mit einem handelsüblichen Goniometer (Abb. 3). Anhaltspunkte hierbei waren die Adduktorensehne und der höchste Punkt des M. rectus femoris bzw. des M. sartorius. Die dazwischen befindliche flache Auflagefläche ist der zu bestimmende Triple-M-Winkel (Abb. 4). Die rechnerische Ermittlung des daraus resultierenden Ramuswinkels erfolgte über klassische Geometrie (Dreiecksberechnung) (Abb. 5a u. b).
Gemessen wurden oberschenkelamputierte Menschen, die eine Prothese nutzen, unabhängig von der Art des Schaftsystems. Es wurden 66 auswertbare Fragebögen erfasst. Davon waren 18 Probanden weiblich und 48 männlich. Nach Richtlinie des Fragebogens und des Messprotokolls wurden die Prothesenanwender standardisiert von sieben verschiedenen Orthopädie-Technikern vermessen. Jeder der Techniker wurde im Vorfeld mit dem Ablauf vertraut gemacht. Hintergrund dessen war, dass die Ergebnisse möglichst ungefärbt und realistisch zustande kommen sollten. Folgende Ergebnisse wurden erfasst (Tab. 1): Bei 21 Probanden bestätigte die Messung des Triple-M-Winkels rechnerisch den Ramuswinkel zu 100 %. Bei 30 Probanden kam es zu Abweichungen von bis zu 5 %, bei 11 Probanden von bis zu 9 %, und bei 4 Probanden ergaben die Messungen eine Abweichung größer 10 % zum tatsächlich ermittelten Ramuswinkel.
90 % aller Probanden tragen in ihrer derzeitigen prothetischen Versorgung ein anatomisches Schaftsystem (M.A.S., Bufa Anatomical Socket, TFSM, sonstige anatomische Form). Trotzdem liegt die Vermutung nahe, dass die getragenen bzw. vorherigen Prothesenschaftsysteme eine Auswirkung auf das Messergebnis haben. Prothesenanwender mit Langzeiterfahrungen mit querovalen Schäften wiesen im Verhältnis zu denen, die solch einen Schaft nicht oder nur kurz getragen haben, einen deutlich flacheren Triple-M-Winkel auf. Ebenso waren häufigere Deformitäten am Ramus erkennbar, wenn lange tuberunterstützende Systeme getragen wurden. Diese haben auch Einfluss auf die Stellung des Beckens im Raum: Durch die Amputation entsteht ein Muskelungleichgewicht, das unterstützt durch eine tuberunterstützende Prothesenversorgung zur Verkippung und Verwringung des Beckens führen kann. Diese Tatsache führt im Umkehrschluss zu einer veränderten Darstellung des Ramuswinkels und erschwert das Messen. Beckenverwringungen werden oft nicht erkannt und durch Längenanpassungen der Prothese zu kompensieren versucht, da lediglich auf die Beckenkämme geachtet wird, nicht aber genügend auf die übrigen anatomischen Gegebenheiten am und rund um das Becken. Bei den Probanden, bei denen eine Beckenverwringung vorlag, kann eindeutig festgestellt werden, dass der neu gemessene Winkel nie den Ramuswinkel widerspiegeln konnte, genauso wie bei den Amputierten mit Beckendeformitäten.
Fazit
Die Messung des Triple-M-Winkels ist eine alternative Möglichkeit zur Bestimmung des Ramuswinkels. Hierbei müssen, so wie auch bei allen anderen Messmethoden, die einflussnehmenden Rahmenbedingungen, wie die Vorversorgung, knöcherne Verformungen des Ramusastes und auch Beckenverwringungen, beachtet werden. Innerhalb der Stichprobe von 66 Probanden konnte bei 32 % der Ramuswinkel rechnerisch bestätigt werden; bei 45,5 % ergab die Messung eine Abweichung von bis zu 5 % vom tatsächlichen Ramuswinkel. Zur Verdeutlichung: Bei einem angenommenen Ramuswinkel von 30° und einer Abweichung von 5 % ergibt sich eine Winkelabweichung von 1,5°. Bei 16 % der Messgruppe ergab sich eine Abweichung um bis zu 9 % vom tatsächlichen Ramuswinkel, und bei 6 % der Gruppe war die Abweichung größer als 10 %. Bei zukünftigen Messungen muss daher genauer auf das Verhältnis zwischen Vorversorgungen, Zeitpunkt und Ursache der Amputation, Ramusdeformitäten, Beckenverwringungen und möglicherweise auch Tragedauer tuberunterstützender Schaftsysteme geachtet werden. Aber alle diese Aspekte sind im Normalfall im Fokus des versorgenden Orthopädie-Technikers bei der Anfertigung eines neuen Schaftsystems und stellen somit die Basis der durchzuführenden Anamnese dar.
Nun obliegt es jedem Techniker, selbst diese Messmethode zu bewerten, auszuprobieren und evtl. in sein Maßschema mit zu übernehmen. Doch die Ergebnisse bestätigen die anfangs aufgestellte Hypothese und ermutigen den Verfasser, weiter in diese Richtung zu forschen.
Kritische Anmerkung: Jede von Hand gemessene Bestimmung von Winkeln, Maßen oder Verhältnismäßigkeiten birgt in sich mögliche menschliche und/oder technische Fehlerquellen. Eine unterstützende bildgebende Diagnostik zur Bestimmung des tatsächlichen Ramuswinkels wäre für die Erhebung wünschenswert gewesen, war aber nicht umsetzbar.
Danksagung
Alleine wäre eine solche Bandbreite an Ergebnissen und auch eine objektive Messung gar nicht möglich gewesen. Deshalb bedankt sich der Verfasser an dieser Stelle bei allen teilnehmenden Orthopädietechniker-Meistern, die ihre Zeit und ihr Engagement für die Untersuchung aufgebracht haben: Christian Alexandrow, Robert Helbing, Hans-Magnus Holzfuß, Christian Müller, Jörg Schnabel und Bernd Sibbel.
Der Autor:
Daniel Merbold
D Med Tech Consulting
Waidmannspromenade 10
14548 Schwielowsee
info@dmedtech.consulting
Begutachteter Beitrag/reviewed paper
Merbold D. Triple‑M („Merbold-Mess-Methode“) — Eine alternative Möglichkeit zur Bestimmung des Ramuswinkels. Orthopädie Technik, 2016; 67 (10): 42–44


- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
