Einleitung
Der Rollstuhl ist eines der am häufigsten verwendeten technischen Hilfsmittel in der Rehabilitation. Laut WHO verwenden etwa 1,85 % der Weltbevölkerung – das entspricht ungefähr 65 Millionen Menschen – einen Rollstuhl zur täglichen Fortbewegung, und zwar sowohl Menschen mit körperlichen Behinderungen als auch Menschen mit reduzierter Muskelkraft wie z. B. Senioren 1. Ein Großteil der Rollstühle wird manuell über einen Greifring angetrieben. Mechanisch gesehen ist dies eine sehr einfache Lösung: Über den parallel zu den Reifen angebrachten Greifring werden die Räder praktisch direkt durch die Arme weitergedreht. Diese Bewegungsform ist jedoch unphysiologisch, wenig effizient und durch einen sehr geringen Wirkungsgrad geprägt 2: Studien haben gezeigt, dass beim Antrieb über den Greifring nur etwa 10 % der aufgebrachten Muskelkraft direkt in Antriebsleistung umgewandelt werden. Die Antriebsbewegung mit dem Greifring ist charakterisiert durch kurze, sich ständig wiederholende Antriebsphasen sowie – vor allem an Schulter und Handgelenk – durch die Kombination von hohen Belastungen mit gleichzeitig extremen Gelenkauslenkungen. Diese hohen, unphysiologischen Belastungen führen häufig zu Problemen an den Gelenken, beispielsweise zu einem Karpaltunnelsyndrom oder zu einem Schulter-Impingement-Syndrom (Schulterengpasssyndrom) 3. Die Muskeln, welche die Schulter umspannen, üben relativ große Kräfte aus, um Gelenkstabilität zu gewährleisten und erhebliche Schultermomente für den Vortrieb zu erzeugen. Die hohen Gelenkmomente, die vom großen Brustmuskel und vom vorderen Deltamuskel – den „Antriebsmaschinen“ beim Rollstuhlantrieb – erzeugt werden, wirken sich destabilisierend auf den Schultergelenkkomplex aus. Zur Stabilisierung des Gelenks erzeugen die Rotatorenmanschettenmuskeln hohe Muskelkräfte und damit Gelenkdruckkräfte, während ihr Beitrag zum äußeren Drehmoment um das Glenohumeralgelenk gering ist.
Für den manuellen Rollstuhlantrieb gibt es nur wenige zweckmäßige Alternativen zum herkömmlichen Greifring 4. Eine auch kommerziell erhältliche Variante stellt der Antrieb durch Hebel dar, bei dem sich die obere Extremität in einem physiologisch günstigeren Bereich bewegt, denn dabei werden sowohl während der Druck- als auch während der Zugphase Antriebskräfte aufgebracht. Allerdings muss die Bewegung jeweils an den Umkehrpunkten abgebremst und die Richtung der Kraftaufbringung umgekehrt werden, was zwangsläufig zu hohen Beschleunigungen und damit auch hohen Gelenkbelastungen führt. Requejo und Kollegen 5 zeigten, dass der Hebelantrieb die Richtung der Glenohumeral-Kontaktkraft in der Schulter ändert, die resultierende Kraft jedoch etwa gleich groß ist.
Eine kontinuierliche Antriebsbewegung der Arme dagegen ist bei den sogenannten Handbikes gegeben, die über Handkurbeln angetrieben werden. Da hier aber eine ganze Antriebseinheit vorne am Rollstuhl montiert werden muss, sind Handbikes wesentlich länger als normale Rollstühle; sie erlauben keine Kurven mit kleinen Radien und sind daher vor allem für den Gebrauch im Freien, aber nicht in beengten Innenräumen geeignet 6.
Im Rahmen der hier vorgestellten Arbeit wurde eine neue manuelle Antriebsform für den Rollstuhl entwickelt: Im Gegensatz zur herkömmlichen Methode, bei der die obere Extremität sich an die mechanischen Gegebenheiten – den Greifring und dessen Geometrie – anpassen muss, lautete die Zielsetzung hier, vom Muskel-Skelett-System der oberen Extremität auszugehen und eine mechanische Antriebsform zu entwickeln, bei der die Gelenke nur in ergonomisch günstigen Bereichen belastet und die Muskelkräfte mit hohem Wirkungsgrad in Antriebsleistung umgewandelt werden. Es sollte also eine sowohl gelenkschonendere als auch effizientere Antriebsform entstehen.
Material und Methode
Computergestützte Entwicklung der optimierten Antriebsform
Um in der Biomechanik numerisch eine neue Bewegungsform zu bestimmen, wird eine sogenannte „forward dynamic optimization“ durchgeführt. Dazu wird zunächst ein Muskel-Skelett-Modell erstellt und ein möglicher Bewegungsablauf simuliert; sodann werden alle Parameter wie Bereiche und Höhe der Muskelaktivität durch einen Optimierungsalgorithmus so lange variiert, bis eine optimale Lösung gefunden ist. Um die optimale Antriebsbewegung für den manuellen Rollstuhlantrieb zu bestimmen, wurde also im ersten Schritt eine Computersimulation einer Rollstuhl-Antriebsbewegung erstellt; dazu wurde die Software „OpenSim 3.3“ 7 verwendet.
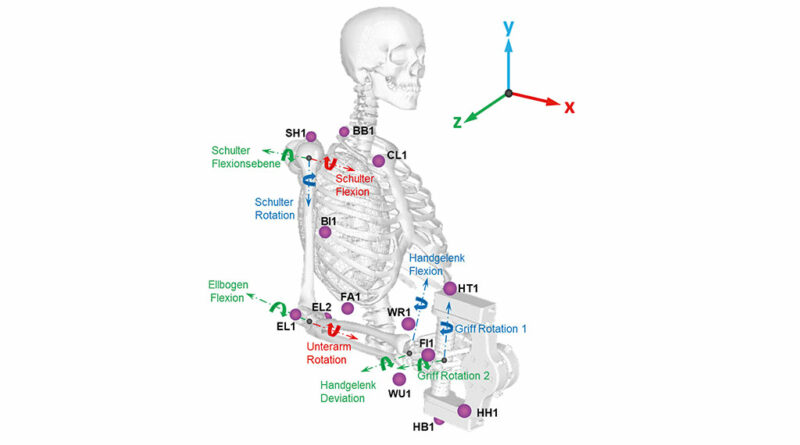
Das verwendete biomechanische Modell des Oberkörpers (Abb. 1) umfasst sieben starre Segmente (Wirbelsäule und Brustkorb, Schlüsselbein, Schulterblatt, Humerus, Ulna, Radius und Hand), die durch Gelenke miteinander verbunden sind. Insgesamt sieben Freiheitsgrade (DoF) ermöglichen Artikulationen an folgenden Positionen:
- an der Schulter (Flexion, Flexionsebene, Rotation),
- am Ellbogen (Flexion),
- am Unterarm (Rotation) und
- am Handgelenk (Deviation und Flexion).
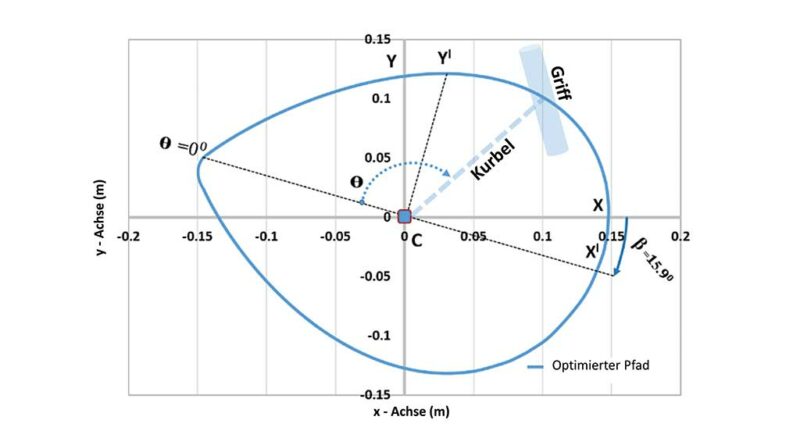
Darüber hinaus sind 30 Muskel-Sehnen-Aktuatoren implementiert, welche die Gelenke umspannen. Die Hand ist fest mit dem Handgriff verbunden, dessen Lage über zwei zusätzliche rotatorische Freiheitsgrade bestimmt wird. Der Handgriff kann sich auf einer beliebigen Bahn in der Ebene der Räder des Rollstuhles bewegen. In einer dynamischen Optimierung wurde errechnet, bei welcher Bewegungskurve des Handgriffes durch die Muskelkräfte die maximale Antriebsleistung bei der vorgegebenen konstanten Winkelgeschwindigkeit von 50 Umdrehungen pro Minute (U/min) aufgebracht werden kann, wobei die Gelenkwinkel auf die physiologischen Bereiche und die Bewegung auf die Ebene des Hinterrades des Rollstuhls beschränkt waren. Die resultierende Bahnkurve mit einem Zirkularitätsverhältnis (Funktion des Umfangs und der Fläche; ein Kreis hat eine Zirkularität von 1) von 0,951 ist in Abbildung 2 dargestellt. Die Optimierung ergab eine Nettoantriebsleistung von 34 Watt bei 50 U/min 8.
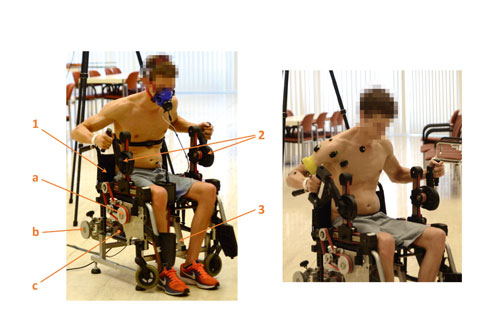
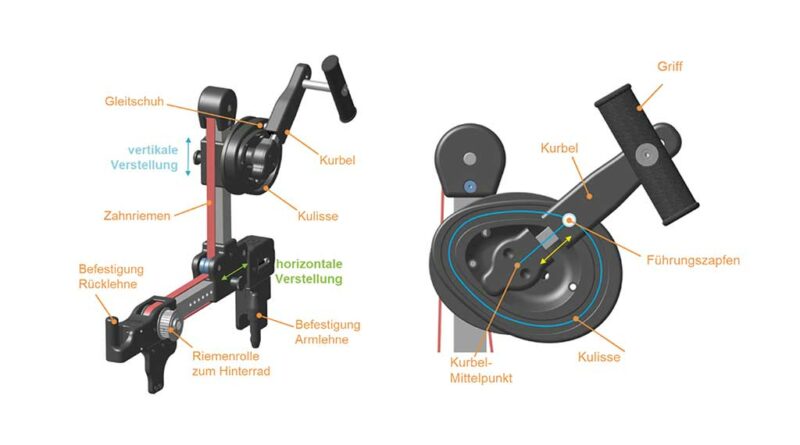
Für die experimentellen Untersuchungen wurde ein stationärer Teststand entwickelt und aufgebaut (Abb. 3), auf dem ein handelsüblicher Rollstuhl fixiert wird, sodass die Räder keinen Kontakt zum Boden haben 9. Ein gesteuerter bürstenloser Motor in Kombination mit einem unter dem Rollstuhl montierten Getriebe und einem Schwungrad simuliert Beschleunigungen und Verzögerungen sowie die Widerstände beim Rollstuhlfahren. Zahnriemen übertragen das Antriebs- bzw. Bremsmoment von der Motor-Getriebe-Einheit zum manuellen Antrieb – entweder ein klassisches Rollstuhlrad mit Greifring oder ein alternativer Antriebsmechanismus wie der kurbelbasierte Antrieb „KURT“, durch den die simulierte optimale Bahnkurve des Handgriffes realisiert wurde (Abb. 4). „KURT“ besteht aus einer Kurbel, die um den Lagerpunkt C rotiert und während der Umdrehung ihre Länge durch eine integrierte Gleitführung ändert. Eine Führungsschablone gibt die Längenänderung der Kurbel vor, sodass sich der Handgriff genau auf der optimierten Bahn bewegt, die zuvor numerisch ermittelt wurde (Abb. 2). Auf dem Rollstuhl wird „KURT“ entweder anstatt oder auf der Armlehne montiert; die Position des Lagerpunktes C muss an die individuellen Körpermaße des Fahrers angepasst werden. Entsprechende horizontale und vertikale Verstellmöglichkeiten sind in dem in Abbildung 4 gezeigten Mechanismus für den Testbetrieb mit verschiedenen Probanden integriert. Wenn ein Rollstuhl eines individuellen Nutzers mit dem „KURT“-Mechanismus ausgestattet wird, kann dieser durch Wegfall der Verstellmöglichkeiten noch wesentlich schlanker ausgeführt und zusätzlich für das Umsetzen weggeklappt werden. In jedem Fall wird der Rollstuhl durch den Mechanismus samt Handkurbeln nicht breiter, sodass er problemlos auch in Innenräumen verwendet werden kann.
Experimentelle Evaluierung des kurbelbasierten Antriebes „KURT“
Um den manuellen Rollstuhlantrieb mit „KURT“ mit dem Antrieb durch den herkömmlichen Greifring zu vergleichen, wurden in einer Kooperation der TU Wien mit dem AUVA Rehabilitationszentrum Weißer Hof (Klosterneuburg, Österreich) mehrere Testserien mit Rollstuhlfahrern durchgeführt. An der Studie nahmen acht Probanden mit Querschnittlähmung teil, die den Rollstuhl zur täglichen Fortbewegung nutzen.
- Bestimmung der Gelenkbelastungen: In einer ersten Testserie wurde ermittelt, welche Gelenkbelastungen beim Antrieb eines Rollstuhles mit dem „KURT“-Mechanismus im Vergleich zum herkömmlichen Greifring in der Praxis tatsächlich auftreten. Die Tests wurden auf dem oben beschriebenen rollstuhlbasierten Prüfstand durchgeführt. Je eine „KURT“-Antriebseinheit wurde für die linke und die rechte Hand montiert; als Handgriff der rechten Hand wurde ein speziell entwickelter kabelloser Kraftmessgriff mit integriertem Kraft- und Drehmomentsensor zur Messung der von der Hand aufgebrachten Kräfte verwendet. Zum Vergleich wurden ebenso die auftretenden Handkräfte beim Antrieb mittels Greifring über ein Rollstuhlrad mit integrierter Sensorik („Smart-Wheel“, Out-Front, Pasco, WA, USA) gemessen. Ein Bewegungsanalysesystem mit 8 Kameras (Motion Analysis Corporation, Santa Rosa, CA, USA) wurde eingesetzt, um die Bewegung der Körpersegmente während der Tests zu erfassen. Die Tests wurden bei zwei Laststufen von 25 Watt und von 35 Watt und mit einer simulierten Rollstuhlgeschwindigkeit von 1,1 m/s durchgeführt. Auf einem Display wurden die tatsächliche Geschwindigkeit und die zu erreichende Soll-Geschwindigkeit angezeigt, um während der Tests möglichst genau die Soll-Geschwindigkeit halten zu können. Das in Abbildung 1 dargestellte Modell des Oberkörpers wurde zuvor für jeden Probanden auf dessen individuelle Körpermaße skaliert; sodann wurden aus den aufgezeichneten Bewegungstrajektorien der reflektierenden Marker und den gemessenen Kraftdaten am Handgriff mittels Inverser Kinematik sowie Inverser Dynamik die Verläufe der Gelenkwinkel und der Gelenkmomente an den Gelenken der oberen Extremität berechnet.
- Energieverbrauch beim Antrieb des Rollstuhles: Zur Ermittlung des Energieverbrauches führten die Probanden auf dem Rollstuhlprüfstand inkrementelle Belastungstests durch, wobei abwechselnd ein Rad mit Greifring und der „KURT“-Mechanismus zum Antrieb verwendet wurden. Die durch den Prüfstand aufgebrachte Widerstandsleistung wurde beginnend bei 10 Watt konstant um 5 Watt pro Minute erhöht. Der Test wurde beendet, wenn entweder 55 Watt Widerstandsleistung erreicht wurden oder die Testperson körperlich erschöpft war. Unter Verwendung eines tragbaren Atemgasanalysesystems (Spiroergometrie) („Cosmed K5“, Cosmed GmbH, Fridolfing, D) das in Abbildung 3a zu sehen ist, wurden kontinuierlich die Sauerstoffaufnahme und der Kohlendioxidausstoß aufgenommen und daraus der Energieverbrauch ermittelt 10. Der mechanische Bruttowirkungsgrad errechnet sich aus dem Verhältnis zwischen der tatsächlichen Widerstandsleistung des Prüfstands und dem Energieverbrauch des Probanden.
Ergebnisse
Handkraftverlauf
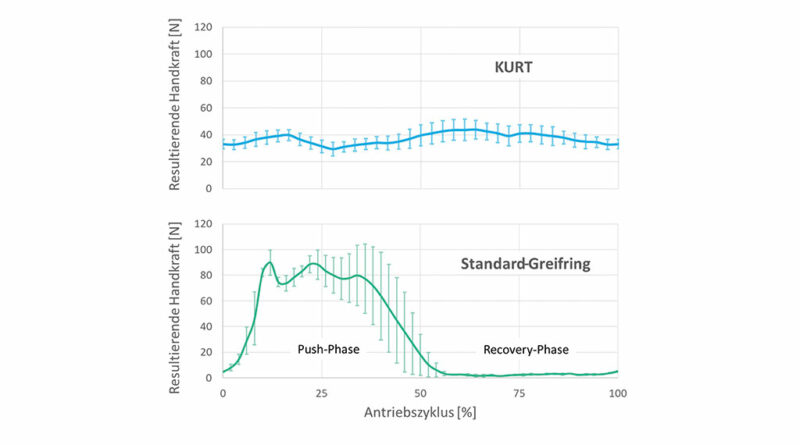
Beim kurbelbasierten Antrieb „KURT“ wird die Antriebskraft relativ gleichmäßig über den Antriebszyklus aufgebracht, während beim Antrieb mittels Greifring nur in der sogenannten Push-Phase Kräfte aufgebracht werden können, die deswegen bei gleicher Belastung wesentlich höher sind. Die Unterschiede der Kraftaufbringung während eines gesamten Zyklus sind in Abbildung 5 dargestellt.
Gelenkbelastungen
Die ermittelten Gelenkwinkelbereiche waren beim Antrieb mit „KURT“ für alle Freiheitsgrade im physiologischen Bereich. Bei „KURT“ bleibt die Schulterrotation annähernd im ergonomisch günstigen Bereich, während sie beim Greifring zu einem großen Teil außerhalb des ergonomischen Bereiches liegt. Die Gelenkwinkelbereiche für Handgelenkdeviation und ‑flexion bleiben bei „KURT“ mit sehr kleinen Ausschlägen durchgehend im ergonomisch günstigen Bereich, wogegen beim Antrieb mittels Greifring am Handgelenk wesentlich größere Gelenkwinkelbereiche zu erkennen sind, die im Falle der Deviation auch über den ergonomischen Bereich hinausgehen (Abb. 6). Da Probleme durch den manuellen Rollstuhlantrieb vor allem an Schulter und Handgelenk auftreten, werden diese beiden Gelenke im Folgenden genauer betrachtet.
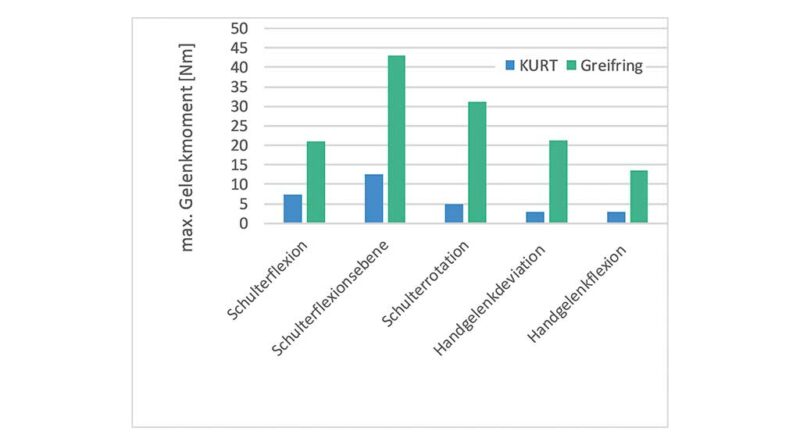
Abbildung 7 zeigt die maximalen Momentenbelastungen im Vergleich, ebenfalls für Schulter- und Handgelenk. Es ist deutlich zu erkennen, dass die Belastungen bei „KURT“ wesentlich niedriger sind, was durch die kontinuierliche Kraftaufbringung und die dadurch deutlich kleineren Kontaktkräfte an der Hand erklärt werden kann. Der größte Unterschied zeigt sich bei der Handgelenkdeviation; hier ist das Gelenkmoment beim Antrieb mittels Greifring im Vergleich zu „KURT“ mehr als 7‑mal so groß.
Energieverbrauch
Die Ergebnisse der Messungen mit Spiroergometrie zeigen, dass der Energieverbrauch bei der Verwendung von „KURT“ bei Laststufen zwischen 10 und 45 Watt im Schnitt 27 % niedriger ist als beim Antrieb mit dem herkömmlichen Greifring (Abb. 8); der errechnete mechanische Bruttowirkungsgrad GME war für „KURT“ im Schnitt 30 % höher.
Diskussion
Mit der Entwicklung des alternativen Rollstuhlantriebes „KURT“ ist es gelungen, eine Antriebsform zu entwickeln, bei der sich die mechanischen Gegebenheiten an den Fahrer und vor allem das Muskel-Skelett-System der oberen Extremität anpassen und nicht umgekehrt, wie es beim klassischen Antrieb mit dem Greifring der Fall ist, bei dem der Fahrer sich an das Gerät anpassen muss. Die Ergebnisse zeigen, dass bei Verwendung von „KURT“ extreme, ergonomisch ungünstige Gelenkwinkel vor allem am Handgelenk vermieden werden können und dass durch die kontinuierliche Kraftaufbringung die Kontaktkräfte an der Hand wesentlich niedriger sind, was auch zu geringeren Maximalbelastungen an den Gelenken führt. Da der Handgriff um seine eigene Achse und auch um die Achse in der Kurbel drehbar gelagert ist, kann das Handgelenk während des gesamten Antriebszyklus nahe der neutralen Position gehalten werden, in der auch die Kraft am besten übertragen werden kann. Die Unterschiede der Gelenkwinkelbereiche am Schultergelenk werden im Vergleich zum konventionellen Greifring-Antrieb durch ein in Zukunft verfügbares schlankeres Design noch deutlich größer ausfallen, da dadurch der Bewegungsablauf näher am Körper stattfinden kann. Auf jeden Fall wird die Antriebskrafterzeugung durch die Aufbringung in der Zug- und Druckphase auf eine größere Anzahl von Muskeln und damit auch eine größere Muskelmasse verteilt, was einerseits Überlastungen von Muskeln vermeidet und andererseits eine Atrophie weniger aktivierter Muskeln vermeiden kann. Insgesamt bleibt das Muskelgleichgewicht der die Gelenke umspannenden Muskeln, die jeweils für Flexion und Extension zuständig sind, besser erhalten als bei der einseitigen Belastung beim Antrieb mittels Greifring.
Der hohe Energieverbrauch und die niedrige mechanische Effizienz beim Antrieb mit dem Greifring werden in der Literatur 11 mit der unterbrochenen, komplexen Antriebsbewegung und dem Energieverlust durch die Beschleunigungs- und Abbremsphasen der Arme jeweils zu Beginn und Ende der Kraftaufbringung erklärt. Die im Rahmen dieser Studie durchgeführten Spiroergometrie-Tests führten zur selben Erkenntnis, was somit auch den ermittelten niedrigeren Energieverbrauch und die höhere Effizienz von „KURT“ erklärt. Des Weiteren konnten in den Tests mit „KURT“ auch höhere Laststufen erreicht werden als mit dem Greifring-Antrieb. Dies wird auch durch die gemessene, weitaus niedrigere Herzfrequenz beim Kurbeln mit „KURT“ im Vergleich zum Greifring-Antrieb ersichtlich. Studien mit Handbikes zeigten ähnliche Effekte 12.
Der hier beschriebene und in den Abbildungen 3 und 4 visualisierte Aufbau ist aufgrund der für die Tests notwendigen Verstellbarkeit noch relativ klobig; in den beschriebenen Testreihen ging es vor allem um die Ermittlung der Muskel- und Gelenkbelastungen und die Verifikation der numerischen Ergebnisse. In einem von der Österreichischen Forschungsförderung (FWF) geförderten Anschlussprojekt geht es jetzt (Stand: Juli 2021) darum, die Konstruktion noch weiter an die Erfordernisse des Alltags anzupassen. Eine Umfrage, an der Rollstuhlfahrer aus dem ganzen deutschsprachigen Raum teilgenommen haben, hat ergeben, dass potenziellen Benutzern in Bezug auf die Alltagstauglichkeit vor allem wichtig ist,
- dass „KURT“ ohne Werkzeug möglichst einfach montiert und demontiert werden kann,
- dass es ohne großen Aufwand für Transfers wegklappbar ist sowie
- dass es Bremsen und einen Freilauf besitzt, damit sich die Kurbeln nach dem Loslassen nicht weiterbewegen.
Als wesentlich wurden des Weiteren folgende Aspekte angesehen:
- ein Rückwärtsgang,
- die Möglichkeit, den Rollstuhl um die eigene Achse zu drehen, sowie
- die Verwendung komfortablerer, gepolsterter Griffe.
In einem Konstruktionswettbewerb haben Teams von Schülerinnen und Schülern Höherer Technischer Schulen in Österreich ihre Kreativität bewiesen und Vorschläge für die Integration der oben genannten Anforderungen in den „KURT“-Antrieb entworfen. Die von einer interdisziplinären Jury bestbewerteten Vorschläge werden derzeit (Stand: Juli 2021) umgesetzt, und es soll die erste Version eines schlanken und maximal alltagstauglichen „KURT“ entstehen. Die Entwicklung kann auf der Homepage kurtproject.com verfolgt werden; auf der Seite ist auch ein Video zu finden, das den ersten Prototyp von „KURT“ in Aktion zeigt.
Schlussfolgerungen
Im Rahmen dieser Studie konnte gezeigt werden, dass durch den neu entwickelten kurbelbasierten Antriebsmechanismus „KURT“ sowohl die Belastungen der Muskel- und Gelenkstrukturen als auch der Energieverbrauch beim manuellen Antrieb eines Rollstuhles verringert werden. Aufgrund der kompakten Bauweise ist „KURT“ auch für den täglichen Gebrauch in Innenräumen geeignet. Besondere Vorteile bringt die Verwendung von „KURT“ für solche Rollstuhlfahrer, die bereits unter Problemen an den Gelenken leiden und diese deshalb während der täglichen Fortbewegung möglichst wenig belasten wollen. Genauso kann „KURT“ aber auch vorbeugend verwendet werden, um Verletzungen, die durch muskuläres Ungleichgewicht an den Gelenken und hohe Belastungen an extremen Gelenkpositionen entstehen können, zu vermeiden und eine effizientere Fortbewegung mit dem Rollstuhl zu ermöglichen.
Danksagung
Die Entwicklung des gelenkschonenden Rollstuhlantriebes „KURT“ wurde von der Österreichischen Forschungsförderungsgesellschaft (FWF) im Rahmen der Projekte P 25507-B24 und WKP 130‑B gefördert.
Für die Autoren:
Univ.-Prof. Dipl.-Ing. Dr. Margit Gföhler
Forschungsbereich Biomechanik
und Rehabilitationstechnik
Institut für Konstruktionswissenschaften
und Produktentwicklung
Technische Universität Wien
Getreidemarkt 9/307/3
A‑1060 Wien
Österreich
margit.gfoehler@tuwien.ac.at
Begutachteter Beitrag/reviewed paper
Gföhler M, Puchinger M, Gstaltner K. „KURT“ – ein gelenkschonender manueller Rollstuhlantrieb. Orthopädie Technik, 2021; 72 (7): 30–35
![Experimentell bestimmte Gelenkwinkelbereiche (gemittelt über alle Probanden) während des Rollstuhlantriebs mit „KURT“ bei 25 Watt im Vergleich zu in der Literatur (Faupin A, Gorce P, Campillo P, Thevenon A, Rémy-Néris O. Kinematic analysis of handbike propulsion in various gear ratios: Implications for joint pain. Clin Biomech (Bristol, Avon), 2006; 21 (6): 560–566. doi: 10.1016/j.clinbiomech.2006.01.001; Rao SS, Bontrager EL, Gronley JK, Newsam CJ, Perry J. Three-dimensional kinematics of wheelchair propulsion. IEEE Trans Rehabil Eng, 1996. doi: 10.1109/86.536770) dokumentierten Werten für den Antrieb mittels Greifring und den physiologisch und ergonomisch empfohlenen Gelenkbereichen (Keyserling WM, Stetson DS, Silverstein BA, Brouwer ML. A checklist for evaluating ergonomic risk factors associated with upper extremity cumulative trauma disorders. Ergonomics, 1993; 36 (7): 807–831. doi: 10.1080/00140139308967945) für Krafteinwirkung an Schulter und Handgelenk (Puchinger M, Stefanek P, Gstaltner K, Pandy MG, Gföhler M. In vivo biomechanical assessment of a novel handle-based wheelchair drive [submitted to IEEE Transactions on Neural Systems and Rehabilitation Engineering, March 2021]).](https://360-ot.de/wp-content/uploads/2021/06/kurt-manueller-Rollstuhlantrieb-gelenkwinkelbereich-abb-6-800x445.jpg)
![Vergleich des durchschnittlichen Energieverbrauches bei Antrieb mit „KURT“ (blau) und mit Greifring (grün) bei steigenden Laststufen (Puchinger M, Kurup N, Gstaltner K, Pandy MG, Gföhler M. Metabolic cost and mechanical ef_ciency of wheelchair propulsion with a novel handle based drive unit compared to conventional push-rim propulsion [submitted June 2021]).](https://360-ot.de/wp-content/uploads/2021/06/Abbildung8-800x445.jpg)
- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- World Health Organization (WHO), Regional Of_ce for South-East Asia. Fact sheet on wheelchairs. October 2010. https://apps.who.int/iris/bitstream/handle/10665/205041/B4616.pdf (Zugriff am 28.05.2021)
- Van Der Woude LHV, Dallmeijer AJ, Janssen TWJ, Veeger D. Alternative modes of manual wheelchair ambulation: An overview. American Journal of Physical Medicine & Rehabilitation, 2001; 80 (10): 765–777. doi: 10.1097/00002060–200110000-00012
- Arnet U, Van Drongelen S, Scheel-Sailer A, Van Der Woude LHV, Veeger DHEJ. Shoulder load during synchronous handcycling and handrim wheelchair propulsion in persons with paraplegia. Journal of Rehabilitation Medicine, 2012; 44 (3): 222–228. doi: 10.2340/16501977–0929
- Van Der Woude LHV, Dallmeijer AJ, Janssen TWJ, Veeger D. Alternative modes of manual wheelchair ambulation: An overview. American Journal of Physical Medicine & Rehabilitation, 2001; 80 (10): 765–777. doi: 10.1097/00002060–200110000-00012
- Requejo PS, Lee SE, Mulroy SJ, Haubert LL, Bontrager EL, Gronley JK, Perry J. Shoulder muscular demand during lever-activated vs pushrim wheelchair propulsion in persons with spinal cord injury. J Spinal Cord Med, 2008; 31 (5): 568–577. doi: 10.1080/10790268.2008.11754604
- Mukherjee G, Samanta A. Physiological response to the ambulatory performance of hand-rim and arm-crank propulsion systems. J Rehabil Res Dev, 2001; 38: 391–399
- Delp SL et al. OpenSim: Open-source software to create and analyze dynamic simulations of movement. IEEE Trans Biomed Eng, 2007; 54 (11): 1940–1950. doi: 10.1109/TBME.2007.901024
- Kurup NBR, Puchinger M, Gföhler M. Forward dynamic optimization of handle path and muscle activity for handle based isokinetic wheelchair propulsion: A simulation study. Computer Methods in Biomechanics and Biomedical Engineering, 2019; 22 (1): 55–63. doi: 10.1080/10255842.2018.1527321
- Puchinger M, Kurup NBR, Gföhler M. A test rig for investigating manual wheelchair propulsion devices. TAR 2017 – Technically Assisted Rehabilitation – March 09–10, 2017. Current Directions in Biomedical Engineering, 2017: 12
- Garby LR, Astrup A. The relationship between the respiratory quotient and the energy equivalent of oxygen during simultaneous glucose and lipid oxidation an lipogenesis. Acta Physiol Scand, 1987; 129 (3): 443–444. doi: 10.1111/j.1365–201x.1987.tb10613.x
- Sawka MN, Glaser RM, Wilde SW, von Luhrte TC. Metabolic and circulatory responses to wheelchair and arm crank exercise. J Appl Physiol Respir Environ Exerc Physiol, 1980; 49 (5): 784–788. doi: 10.1152/jappl.1980.49.5.784
- Dallmeijer AJ, Zentgraaff IDB, Zijp NI, Van Der Woude LHV. Submaximal physical strain and peak performance in handcycling versus handrim wheelchair propulsion. Spinal Cord, 2004; 42 (2): 91–98. doi: 10.1038/sj.sc.3101566
