Einleitung
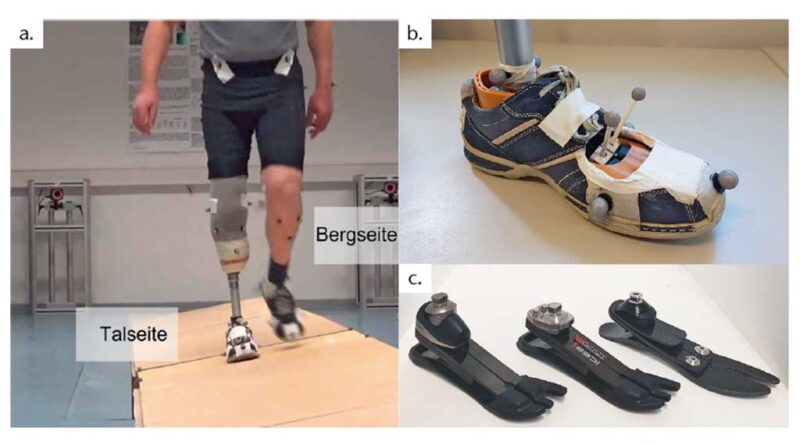
Für aktive Personen mit Beinamputation ist die Fortbewegung auf unebenem Untergrund alltäglich, aber dennoch anspruchsvoll: Neben Schrägen und Hindernissen gehören auch Seitschrägen zu den häufigen Herausforderungen, da viele Gehwege zur Wasserabführung quer zur Laufrichtung geneigt sind. Durch die Seitneigung ändert sich die Krafteinleitung in die Prothese; zudem entsteht eine funktionelle Beinlängendifferenz, die ausgeglichen werden muss. Dazu gibt es verschiedene Kompensationsstrategien 1 2 3.
Prothesenkomponenten, die sich an den Untergrund adaptieren, könnten den Kompensationsaufwand für den Anwender reduzieren. Der Prothesenfuß als zentrale Komponente von Prothesen der unteren Extremität besitzt durch seine Materialeigenschaften und Konstruktionsmerkmale eine individuelle Flexibilität in der Frontal- und Sagittalebene, die bei Belastung zur Anpassung an Unebenheiten beiträgt 4 5. Konstruktiv besitzen viele Prothesenfüße eine geteilte Zehenplatte („split-toe“), die die Anpassungsfähigkeit in der Frontalebene erhöhen soll 6 7. Darauf zurückzuführende Anwendervorteile für das Gehen auf quergeneigtem Untergrund wurden bislang jedoch noch nicht systematisch untersucht und konnten somit bis dato nicht verifiziert werden. Vielmehr untersuchten die meisten vorhandenen Studien Kompensationsmechanismen zum Bewältigen solcher Seitschrägen unabhängig vom Prothesendesign. Im Vordergrund stand dabei meist die Situation mit der Prothese bergseitig auf der Seitschräge, wobei diese sich dann als funktionell zu lang erweist. Dies kann insbesondere in der Schwungphase problematisch sein. Bei Untersuchungen von Villa und Kollegen zeigten Personen mit transtibialer Amputation (TTAs) prothesenseitig vergrößerte Hüft- und Kniewinkel, um Bodenfreiheit zum Durchschwingen zu generieren 8, Personen mit transfemoraler Amputation (TFAs) hingegen ein Beckenanheben und Fersenreißen („vaulting“) kontralateral 9. Ein erhöhter Energieaufwand durch solche Kompensationsmechanismen erscheint plausibel und wurde bereits mit TFAs auf Seitschrägen gezeigt 10.
Durch ein Knöchelmodul (Abb. 1), das eine Anpassung von +/- 10° in der Frontalebene ermöglicht („Side-Flex“-Modul, Ottobock, Duderstadt, Deutschland), sollen diese Gangsituationen für Amputierte erleichtert werden. Weiterführend zur vorhandenen Literatur wird in dieser Studie mittels stationärer Ganganalyse der Einfluss dieses „Side-Flex“-Moduls auf kinematische und kinetische Gangparameter im Vergleich mit herkömmlichen Carbonfederfüßen analysiert. Zudem werden mittels Fragebögen die Auswirkungen auf Schaftkomfort und Balance untersucht. Die hier in Teilen vorgestellte Studie wurde bereits international publiziert 11.
Methodik
Probanden
An der Studie nahmen 12 Probanden mit einseitiger transtibialer Amputation (TTA) teil (10 männlich, 2 weiblich; Alter: 52.8 ± 11.5 Jahre; Gewicht: 83.9 ± 19.4 kg, Körpergröße: 1.77 ± 0.09 m). Die Amputation lag mindestens 18 Monate zurück, und die Teilnehmer ordneten sich in die Mobilitätsgrade 3 und 4 ein.
Prothesenfüße
Drei verschiedene Prothesenfußtypen wurden in der Studie verwendet – ein Studienfuß (TSF) und zusätzlich zwei Referenzfüße (RF) (Abb. 2c). Bei den Referenzfüßen vom Typ „Triton LP“ (Ottobock, Duderstadt, Deutschland) und „Pro-Flex LP“ (Össur, Reykjavik, Island) handelt es sich um etablierte Low-Profile-Prothesenfüße mit geteilter Zehenplatte für aktive Anwender. Der Studienfuß „Triton Side Flex“ (TSF, Ottobock, Deutschland) verfügt über das oben beschriebene „Side-Flex“-Modul. Die Carbonbasis des TSF ist identisch mit dem des „Triton-LP“-Fußes. Alle verwendeten Prothesenfüße sind für die Mobilitätsgrade 3 und 4 geeignet.
Versuchsablauf
Vor Beginn wurden die Probanden über die Studie aufgeklärt und eine schriftliche Einwilligung eingeholt. Die Studie wurde von der lokalen Ethikkommission der Universitätsmedizin Göttingen (UMG) genehmigt und in Übereinstimmung mit der Deklaration von Helsinki durchgeführt. Die Studie umfasste die Erfassung biomechanischer Daten mittels einer Ganganalyse und die subjektive Bewertung der Prothesenfüße mittels Fragebögen. Dazu testete jeder Teilnehmer den Studienfuß (TSF) und einen der zwei Referenzfüße (RF) mindestens 4 Wochen lang, bevor die Ganganalyse und die Befragung durchgeführt wurden. Die Wahl des Referenzfußes und die Testreihenfolge waren randomisiert. Der Prothesengrundaufbau erfolgte reproduzierbar nach Herstellerangaben unter Nutzung eines „L.A.S.A.R. Assembly“ (Ottobock, Duderstadt, Deutschland). Anschließend fanden eine statische Optimierung mit Hilfe eines „L.A.S.A.R. Posture“ (Ottobock, Duderstadt, Deutschland) 12 13 und eine dynamische Optimierung statt.
Ganganalyse
Die biomechanischen Messungen erfolgten in einem Ganglabor, das mit 12 „Bonita“-Kameras (Vicon, Oxford, UK) und 2 Kraftmessplatten (Kistler, Winterthur, Schweiz) ausgestattet ist. Es wurde ein spezielles Markerset verwendet, das neben den Standard-Gangparametern auch die separate Ermittlung der Anpassung des Fußes (Schuh und Prothesenfuß) und der Carbonfeder in der Frontalebene ermöglicht 14 15 (Abb. 2b).
Das Gehen in der Ebene sowie das Gehen auf einer Seitschräge mit 10° Neigung wurden biomechanisch untersucht. Die Seitschräge war 8.5 m lang und mit einer Kraftmessplatte in der Mitte ausgestattet. Die Teilnehmer wurden angewiesen, die Gehstrecke mehrmals mit einer selbstgewählten Gehgeschwindigkeit zu gehen, bis jeweils acht gültige Aufzeichnungen für jede Bedingung (ebenes Gehen, Seitneigungsbedingungen: 10° Prothese Berg, 10° Prothese Tal) erfasst waren.
Die gültigen Versuche wurden gemittelt und weiter ausgewertet. Folgende Parameter wurden ermittelt:
- Gang-Zeit-Parameter: Ganggeschwindigkeit, Schrittlänge, Schrittweite und Dauer der Standphase
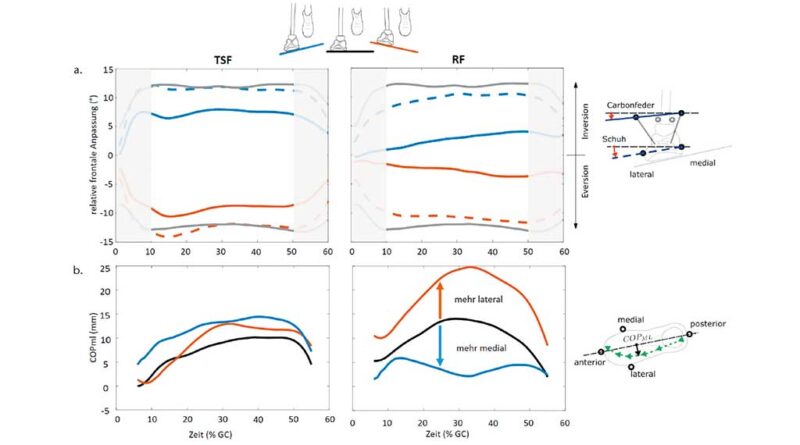
- spezifische biomechanische Parameter: Anpassung des Schuhs sowie der Carbonbasis des Prothesenfußes in der Frontalebene sowie mediolateraler Verlauf des Kraftangriffspunktes (COPml, Center of Pressure) in Bezug auf die anterior-posteriore Fußachse (vgl. Skizze in Abb. 3)
- kinetische Parameter: Bodenreaktionskraft in vertikaler (GRFv) und mediolateraler (GRFml) Richtung sowie externes Knieadduktionsmoment (EAM, erstes Maximum und Integral über Gangzyklus)
Probandenbefragung
Zusätzlich zu den biomechanischen Messungen füllten alle Teilnehmer einen Fragebogen aus, mit dem sie ihre Erfahrungen mit der Prothese während der vierwöchigen Testanwendung bewerten sollten. Dieser Fragebogen umfasste drei Teile:
- Activity-specific-Balance-Confidence-Skala (ABC-Skala)16 (16 Fragen);
- Prosthetic Limb Users Survey of Mobility (PLUS‑M) 17 18 (12 Fragen);
- selbst entwickelter Fragenkomplex zur Bewertung des Schaftkomforts und der empfundenen Sicherheit in 40 Situationen des täglichen Lebens (ADL-Skala).
Unter den mit der ADL-Skala bewerteten Situationen befanden sich die folgenden:
- 9 Situationen mit Bezug zum Stehen;
- 11 Situationen mit Bezug zum Gehen, die möglicherweise durch die mediolaterale Flexibilität beeinträchtigt wurden;
- 8 Situationen mit Bezug zum Gehen, die wahrscheinlich nicht durch die mediolaterale Flexibilität beeinträchtigt wurden;
- 12 Situationen mit Bezug zu sozialen Aktivitäten.
Sowohl der Schaftkomfort als auch die wahrgenommene Sicherheit wurden auf einer numerischen Bewertungsskala von 0 („am schlechtesten“) bis 10 („am besten“) bewertet. Am Ende der Studie wurden die Teilnehmer außerdem gefragt, welchen der beiden getesteten Füße sie für den täglichen Gebrauch bevorzugen würden.
Statistik
Für die untersuchten Parameter wurden für jede Situation individuelle Mittelwerte und Gruppenmittelwerte bestimmt. Um die Auswirkungen der verschiedenen Prothesenfußtypen (RF vs. TSF) auf die verschiedenen Situationen zu vergleichen, wurde ein paarweiser t‑Test bzw. nichtparametrischer Wilcoxon-Test durchgeführt. Weiterhin erfolgte eine statistische Analyse der Ergebnisse der Fragebögen unter Nutzung des gepaarten t‑Tests.
Ergebnisse der Studie
Biomechanische Parameter aus der Ganganalyse
Gang-Zeit-Parameter
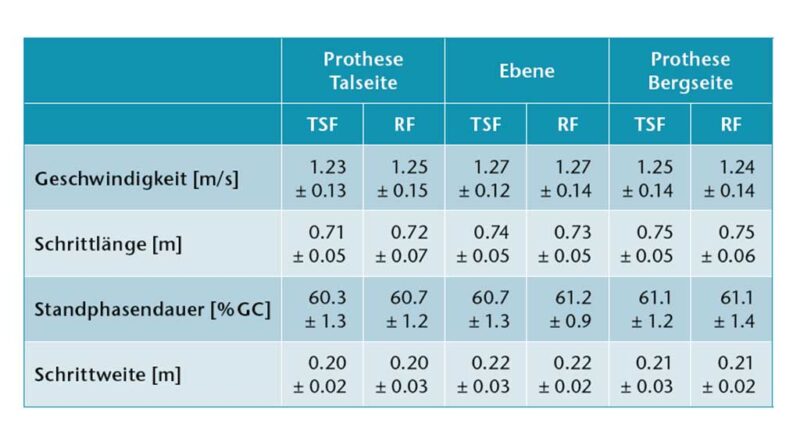
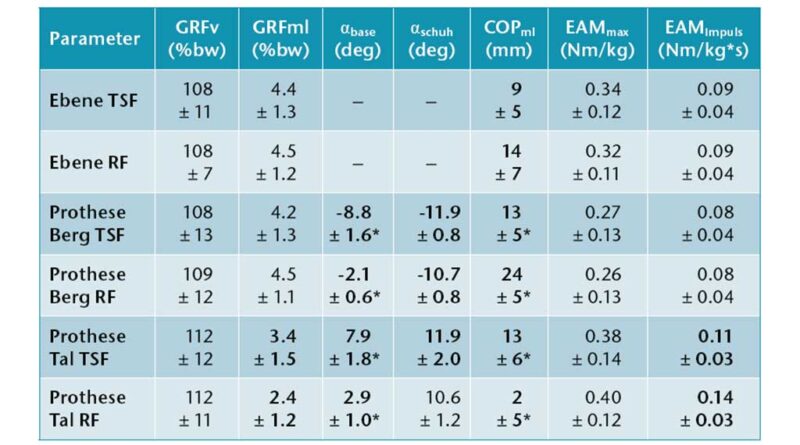
Die analysierten Gang-Zeit-Parameter zeigten für keine Bedingung statistisch signifikante Unterschiede zwischen TSF und RF. Gehgeschwindigkeit und Schrittweite nahmen für beide Prothesenfüße tendenziell auf der Seitschräge im Vergleich zur Ebene ab. Die detaillierten Ergebnisse sind Tabelle 1 zu entnehmen.
Spezifische biomechanische Parameter
Die Anpassungen des Schuhs und der Prothese in der Frontalebene in Abhängigkeit von der Seitschräge sind in Abbildung 3 dargestellt. Für den TSF wurde im Vergleich zu den RF eine größere und über die Standphase hinweg gleichbleibende Anpassung gemessen. Die RF zeigten zu Beginn der Standphase nur eine geringe Anpassung, die sich allerdings im Laufe des Gangzyklus stetig vergrößert. Die ermittelte Anpassung in der Mitte der Standphase (30 % Gait Cycle) war für den TSF signifikant (p < 0.01) größer als für die RF. Die gemessene Anpassung des Schuhs zeigte ähnliche Eigenschaften mit geringeren Unterschieden zwischen den untersuchten Füßen.
Die COPml-Verläufe der RF zeigen deutliche Unterschiede zwischen den einzelnen Bedingungen. Im Vergleich zum Gehen auf der Ebene wurde der COPml für die Prothesen-Berg-Situation weiter lateral und für die Prothesen-Tal-Situation weiter medial ausgelenkt. Für den TSF hingegen lagen die Kurven eng beieinander. Ein ebenfalls eng beieinander liegender Verlauf der COPml-Kurven wurde auch bei einer Kontrollgruppe festgestellt (Abb. 4; 19). Ein Vergleich zwischen RF und TSF zeigte signifikante Unterschiede im COPml-Verlauf für alle Bedingungen (Tab. 2; Abb. 3b).
Kinetische Parameter
Mit dem TSF wurde der prothesenseitige EAM-Impuls des Knies beim Gehen mit der Prothese auf der Talseite deutlich reduziert. Beim Gehen mit der Prothese auf der Bergseite und in der Ebene wurden keine Unterschiede festgestellt (Tab. 2). EKAM-Peaks zeigten für alle Bedingungen keine Unterschiede.
Die beobachteten GRFv zeigten für alle Situationen keine Unterschiede zwischen den Füßen. Es gab einen Trend zu einem erhöhten ersten Maximum für die Prothesen-Tal-Situation. Ein signifikanter Unterschied in der GRFml wurde für die Prothesen-Tal-Situation (30 % GC) festgestellt.
Ergebnisse der Probandenbefragung
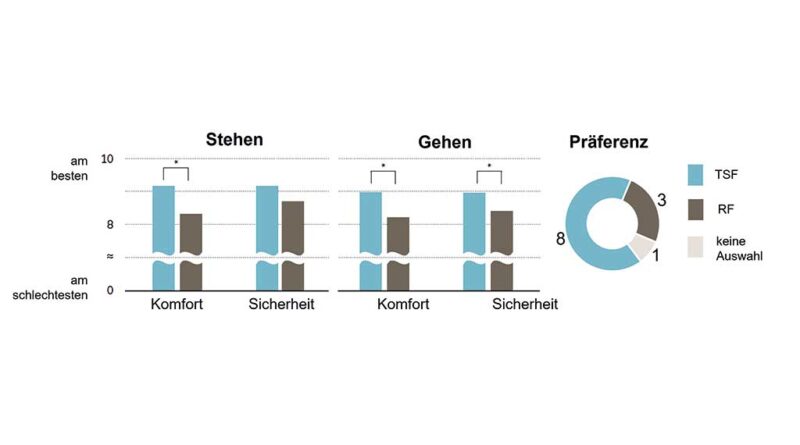
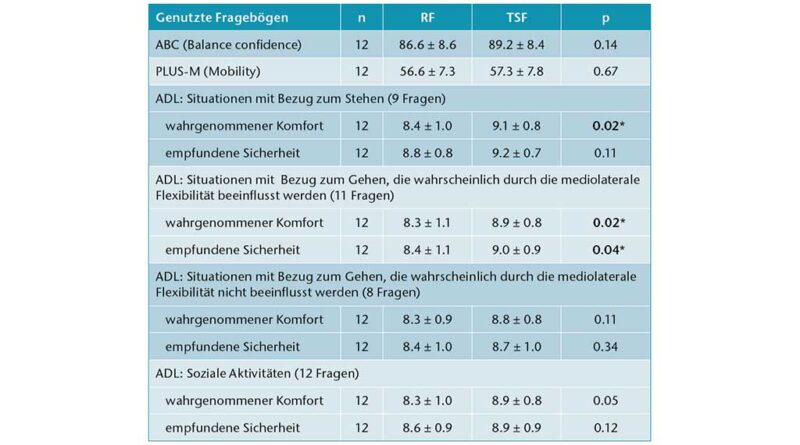
Die Ergebnisse der Probandenbefragung sind in Tabelle 3 aufgeführt. Es wurden signifikant höhere Bewertungen (p < 0.05) für den TSF-Fuß für folgende Kategorien festgestellt:
- wahrgenommener Komfort beim Stehen sowie
- wahrgenommener Komfort und Sicherheit beim Gehen in Situationen, die möglicherweise durch die mediolaterale Flexibilität beeinträchtigt werden (ADL-Skala).
Alle anderen ADL-Subskalen sowie ABC und PLUS‑M tendierten zwar zu höheren Bewertungen bei Verwendung des TSF-Fußes, erreichten jedoch keine statistische Signifikanz. In Bezug auf die Fußpräferenz bevorzugten acht Teilnehmer den TSF, drei Teilnehmer bevorzugten einen der Referenzfüße (1 × „Triton LP“, 2 × „Pro-Flex LP“), ein Teilnehmer hatte keine Präferenz.
Diskussion
Mehrere Studienergebnisse unterstützen die initiale Annahme, dass ein Knöchelmodul mit hoher Anpassungsfähigkeit in der Frontalebene das Fortbewegen auf unebenem Untergrund erleichtert. Die ausgeprägte Anpassung des TSF zu Beginn der Standphase erweist sich als wichtig. Dies korreliert mit den Ergebnissen von Yates 20, der bei seinen Versuchen auf unebenem Untergrund die verbesserte Balance der Patienten auf umfangreiche Fußanpassungen in der Frontalebene in der frühen Standphase zurückführte. Im Vergleich zu den Referenzfüßen adaptiert sich der TSF bereits bei Lastübernahme in deutlich größerem Umfang an die Seitschräge und behält die Anpassung bis zum Ende der Standphase bei. Die Anwender beschreiben in diesem Zusammenhang ein spürbar anderes Prothesenfußverhalten direkt beim Betreten einer Seitschräge mit einem höheren Maß an empfundener Sicherheit. Die Referenzfüße hingegen adaptieren sich erst mit zunehmender Belastung des Vorfußes, sodass die maximale Anpassung erst zum Ende der Standphase erreicht wird. Die Betrachtung der Schuhanpassung zeigt ein ähnliches Muster mit früher gleichbleibender Anpassung beim TSF und mit gleichmäßig zunehmender Anpassung bei den RF – die Unterschiede in der Gesamtanpassung des Schuhs sind im Vergleich zur Anpassung des Fußes aber deutlich geringer. Hier lässt sich ursächlich eine Relativbewegung zwischen Carbonfeder, Fußhülle und Schuh vermuten. Entsprechend tragen Schuh und Fußhülle auch immer zur Gesamtanpassung bei. Die herkömmlich erfassten Daten aus den zuvor genannten Studien mit auf dem Schuh platzierten Markern geben genau diese Mischanpassung wieder.
Anhand des gemessenen Verlaufs des Kraftangriffspunkts ist ebenfalls die differente Fußanpassungsfähigkeit in der Frontalebene zu erkennen (Abb. 3b). Hier zeigt der TSF für alle drei Gangsituationen ähnliche Verläufe, was den Ergebnissen einer Kontrollgruppe entspricht 21. Daher kann angenommen werden, dass sich das „Side-Flex“-Modul ähnlich schnell adaptiert wie das untere Sprunggelenk der Kontrollgruppe und es dadurch nur geringe Abweichungen im Kraftangriffspunktverlauf zwischen den Situationen „Ebene“ und „Seitschräge“ gibt. Bei Betrachtung der mediolateralen Bodenreaktionskräfte zeigen sich ebenfalls ähnliche Muster bei der TSF- und bei der Kontrollgruppe 22. Die Referenzfüße hingegen konnten sich nur eingeschränkt an die Seitschräge anpassen. Entsprechend erfolgt die Kraftübertragung hauptsächlich über den lateralen Fußrand (Prothese bergseitig) bzw. über den medialen Fußrand (Prothese talseitig), was zu einer deutlichen Verschiebung des gemessenen Kraftangriffspunktes während der Schrittabwicklung führt. Es ist anzunehmen, dass diese Abweichungen einen erhöhten Kompensationsaufwand für den Prothesenträger beim Gehen auf Seitschrägen mit den Referenzfüßen bedeuten.
Im Vergleich der Gangsituationen bewerteten die Prothesenträger die Bergsituation als die anspruchsvollste. Betrachtet man hierzu die funktionelle Beinlängendifferenz, zeigt sich, dass die Prothese, wenn sie bergseitig auf einer Seitschräge mit 10° bei 20 cm Schrittweite steht, ca. 35 mm zu lang ist. Gemäß den Untersuchungen von Walsh und Kollegen 23 erfordern Beinlängenunterschiede von mehr als 5 mm jedoch bereits Kompensationsstrategien. Entsprechend ist auf der Versuchs-Seitschräge von 10° ein deutlicher Mehraufwand zur Prothesensteuerung zu erwarten. Der TSF ermöglicht in dieser Gangsituation durch die Rotation im „Side-Flex“-Modul eine effektive Prothesenverkürzung von ca. 5 mm, die hier aber nicht ausreichend ist. Bei vielen seitlichen Schrägen im Alltag, z. B. auf zum Wasserablauf geneigten Fußwegen, zeigt sich anhand der Befragungen jedoch, dass diese Prothesenverkürzung bei weniger stark geneigten Seitschrägen ausreichend bzw. vorteilhaft sein kann. Ein Anwender berichtete, dass er bei längeren Spaziergängen nach Möglichkeit die Straßenseite wechsele, um auf dem überhöhten Fußweg mit der Prothese stets talseitig gehen zu können. Mit dem TSF musste er darauf nicht mehr achten.
Bei der Analyse der Fragebogenergebnisse fällt auf, dass die Bewertungen aller Füße insgesamt sehr gut und die Unterschiede zwischen den Füßen minimal sind. Hier ist zu berücksichtigen, dass es sich ausschließlich um aktive, sichere Anwender mit hochfunktionalen Prothesen handelt, bei denen keine massiven Einschränkungen im Alltag bestehen. Dennoch zeigen alle Ergebnisse höhere Bewertungen für den TSF, wovon drei Ergebnisse statistische Signifikanz erreichen. Die Autoren nehmen an, dass sich die Steigerung der wahrgenommenen Sicherheit beim Gehen auf unebenem Untergrund mit dem TSF durch die schnelle, umfängliche Anpassung und die konstanten mediolateralen Bodenreaktionskräfte begründet. Vermutlich ist dadurch der Steuerungsaufwand der Prothese geringer, was sich auch positiv auf den wahrgenommenen Schaftkomfort auswirkt.
Die abschließende Befragung der Studienteilnehmer nach dem individuell favorisierten Prothesenfuß am Ende der Studie zeigte mit 8 von 12 eine klare Präferenz für den TSF. Bei den drei Probanden, die den RF präferieren, sind die Ablehnungsgründe gegenüber dem TSF interessant: Der Anwender, der den „Triton LP“ präferierte, hatte prothesenseitig ein instabiles Kniegelenk und konnte sich über dem TSF nicht hinreichend stabilisieren. Dies stellt eine mögliche Kontraindikation dar und bedarf weiterer Untersuchung. Zwei Anwender präferierten den „Pro-Flex LP“, weil das Überrollen als komfortabler empfunden wurde. Der Abrollkomfort wird maßgeblich durch die Steifigkeit bzw. die Kategorie der Carbonbasisfeder bestimmt. Die Gewichtsbereiche, die die einzelnen Kategorien bei den „Triton“-Prothesenfüßen abdecken, sind vergleichsweise groß. So können Prothesenfüße für Anwender mit einem Körpergewicht am unteren Ende der Kategorie steif wirken. Für solche Fälle können Prothesenfüße mit enger abgestimmten Kategorien, etwa das Modell „Taleo Side Flex“ (Abb. 1b), eine flexiblere Alternative sein.
Fazit
Es konnte gezeigt werden, dass sich das Knöchelmodul des TSF bereits in der frühen Standphase umfänglich an Seitschrägen anpasst. Die Autoren sehen diese gegenüber den Referenzfüßen gesteigerte Adaptivität ursächlich für das positive Anwenderfeedback mit Präferenz des TSF. Entsprechend kann ein solches Knöchelmodul zur verbesserten Fortbewegung auf unebenem Untergrund beitragen.
Interessenkonflikt
Fünf der Autoren sind Mitarbeiter der Firma Ottobock SE & Co. KGaA. Die untersuchten Prothesenfüße stammen von unterschiedlichen Herstellern.
Für die Autoren:
Dipl.-Ing. (FH) Björn Altenburg, OTM
CRS – Biomechanische Forschung
Otto Bock SE & Co. KGaA
Hermann-Rein-Str. 2a
37075 Göttingen
Bjoern.Altenburg@ottobock.de
Begutachter Beitrag/reviewed paper
Altenburg B, Ernst M, Maciejasz P, Schmalz T, Braatz F, Gerke H, Bellmann M. Ein frontal bewegliches Knöchelmodul für Prothesenfüße – was ist der Nutzen für den Patienten? Orthopädie Technik, 2022; 73 (5): 76–82

- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Walsh M, Connolly P, Jenkinson A, O’Brien T. Leg length discrepancy – an experimental study of compensatory changes in three dimensions using gait analysis. Gait Posture, 2000; 12: 156–161
- Villa C, Loiret I, Langlois K, Bonnet X, Lavaste F, Fodé P, et al. Cross-Slope and level walking strategies during swing in individuals with lower limb amputation. Arch Phys Med Rehabil, 2017; 98: 1149
- Villa C, Drevelle X, Bonnet X, Lavaste F, Loiret I, Fodé P, et al. Evolution of vaulting strategy during locomotion of individuals with transfemoral amputation on slopes and cross-slopes compared to level walking. Clin Biomech, 2015; 30: 623–628
- Ernst M, Altenburg B, Schmalz T. Characterizing adaptations of prosthetic feet in the frontal plane. Prosthet OrthotInt, 2020; 44 (4): 225–233
- Womac ND, Neptune RR, Klute GK. Stiffness and energy storage characteristics of energy storage and return prosthetic feet. Prosthet Orthot Int, 2019; 43 (3): 266–275
- Ernst M, Altenburg B, Schmalz T. Characterizing adaptations of prosthetic feet in the frontal plane. Prosthet OrthotInt, 2020; 44 (4): 225–233
- Maitland ME et al. Finite Element Simulation of Frontal Plane Adaptation Using Full-Foot, Split-Toe, and Cam-Linkage Designs in Prosthetic Feet. Journal of Prosthetics and Orthotics, 2022; 34 (1): 14–21
- Villa C, Loiret I, Langlois K, Bonnet X, Lavaste F, Fodé P, et al. Cross-Slope and level walking strategies during swing in individuals with lower limb amputation. Arch Phys Med Rehabil, 2017; 98: 1149
- Villa C, Drevelle X, Bonnet X, Lavaste F, Loiret I, Fodé P, et al. Evolution of vaulting strategy during locomotion of individuals with transfemoral amputation on slopes and cross-slopes compared to level walking. Clin Biomech, 2015; 30: 623–628
- Starholm I‑M, Gjovaag T, Mengshoel AM. Energy expenditure of transfemoral amputees walking on a horizontal and tilted treadmill simulating different outdoor walking conditions. Prosthet Orthot Int, 2010; 34: 184–194
- Altenburg B, Ernst M, Maciejasz P, Schmalz T, Braatz F, Gerke H, Bellmann M. Effects of a prosthetic foot with increased coronal adaptability on cross-slope walking. Canadian Prosthetics & Orthotics Journal, 2021; 4 (1): article no. 7
- Blumentritt S, Schmalz T, Jarasch R, Schneider M. Effects of sagittal plane prosthetic alignment on standing transtibial amputee knee loads. Prosthet Orthot Int, 1999; 23 (3): 231–238
- Blumentritt S, Schmalz T, Jarasch R. Significance of static prosthesis alignment for standing and walking of patients with lower limb amputation. Orthopade, 2001; 30 (3): 161–168
- Ernst M, Altenburg B, Schmalz T. Characterizing adaptations of prosthetic feet in the frontal plane. Prosthet Orthot Int, 2020; 44 (4): 225–233
- Altenburg B, Ernst M, Maciejasz P, Schmalz T, Braatz F, Gerke H, Bellmann M. Effects of a prosthetic foot with increased coronal adaptability on cross-slope walking. Canadian Prosthetics & Orthotics Journal, 2021; 4 (1): article no. 7
- Powell LE, Myers AM. The activities-specific balance confidence (ABC) scale. J Gerontol A Biol Sci Med Sci, 1995; 50 (1): 28–34
- Hafner BJ, Morgan SJ, Abrahamson DC, Amtmann D. Characterizing mobility from the prosthetic limb user’s perspective: Use of focus groups to guide development of the Prosthetic Limb Users Survey of Mobility. Prosthet Orthot Int, 2016; 40 (5): 582–590
- Hafner BJ, Gaunaurd IA, Morgan SJ, Amtmann D, Salem R, Gailey RS. Construct validity of the Prosthetic Limb Users Survey of Mobility (PLUS‑M) in adults with lower limb amputation. Arch Phys Med Rehabil, 2017; 98 (2): 277–285
- Altenburg B, Ernst M, Maciejasz P, Schmalz T, Braatz F, Gerke H, Bellmann M. Effects of a prosthetic foot with increased coronal adaptability on cross-slope walking. Canadian Prosthetics & Orthotics Journal, 2021; 4 (1): article no. 7
- Yeates KH, Segal AD, Neptune RR, Klute GK. A coronally clutching ankle to improve amputee balance on coronally uneven and unpredictable terrain. J Med Devices, 2018; 12 (3): 031001
- Altenburg B, Ernst M, Maciejasz P, Schmalz T, Braatz F, Gerke H, Bellmann M. Effects of a prosthetic foot with increased coronal adaptability on cross-slope walking. Canadian Prosthetics & Orthotics Journal, 2021; 4 (1):article no. 7
- Altenburg B, Ernst M, Maciejasz P, Schmalz T, Braatz F, Gerke H, Bellmann M. Effects of a prosthetic foot with increased coronal adaptability on cross-slope walking. Canadian Prosthetics & Orthotics Journal, 2021; 4 (1):article no. 7
- Walsh M, Connolly P, Jenkinson A, O’Brien T. Leg length discrepancy – an experimental study of compensatory changes in three dimensions using gait analysis. Gait Posture, 2000; 12: 156–161
