Einleitung
Die „Statistik der schwerbehinderten Menschen“ des Statistischen Bundesamts 1 besagt, dass im Jahr 2011 1,41 Millionen Menschen in Deutschland auf den Rollstuhl angewiesen waren. Für diese Menschen stellt der Rollstuhl eine Mobilitätsgarantie dar, bei der eine individuelle Rollstuhladaptation eine große Rolle spielt. Da unterschiedliche Einstellungen von Sitzhöhe, Sitzneigung, Antriebsradgröße etc. Einfluss auf die Dynamik haben, sollten weiterführend auch Bewegungsabläufe vor allem beim Antrieb betrachtet und untersucht werden. Um den Antrieb in Bezug auf die Auswirkungen dreier unterschiedlicher Greifpositionen auf den Verlauf des Kraftangriffspunkts und der Vortriebskraft (kinetische Parameter) sowie auf die Winkelverläufe des Oberkörpers (kinematische Parameter) genauer zu untersuchen, wurden im Rahmen der vorliegenden Studie verschiedene Messungen durchgeführt.

Stand der Wissenschaft
Zweck eines Rollstuhls ist es, dem Patienten trotz seiner körperlichen Einschränkungen größtmögliche Mobilität zu verschaffen 2. Die Fortbewegung, also auch der Rollstuhlantrieb, stellt ein zentrales Element dar, um dieses Maß an Mobilität zu ermöglichen. Der Antrieb eines Rollstuhls unterliegt dabei einer Vielzahl von Einfluss faktoren, z. B. der Sitzposition des Rollstuhlfahrers. Im weiteren Verlauf wird der Fokus auf den aktiven Antrieb des Rollstuhls mit den Armen gelegt.
Engström 34 hat sich mit dem „optimalen Rollstuhlantrieb“ beschäftigt. Bei einem optimal eingestellten Rollstuhl sollten demnach die Greifreifen möglichst weit oben gegriffen werden 5. Das hohe Greifen ermöglicht einen großen Bewegungsumfang und erlaubt ein ruhiges Antreiben. Engström beschreibt eine Positionierung der Achse der Antriebsräder von 5 bis 10 cm vor der Schulter als optimale Einstellung 6, um den Rollstuhl möglichst leicht antreiben zu können. Gleichzeitig ermöglicht diese Position der Antriebsräder ein leichteres „Ankippen“ der Vorderräder, um Hindernisse zu überwinden und dadurch die Mobilität des Rollstuhlfahrers zu erhöhen. Die Hände vollführen dabei eine ovale Bewegung 7. Diese unterteilt der Autor in einen Arbeitsweg und einen Leerweg 89. Da die initiale Greifposition laut Robertson et al. (1996) 10 bei erfahrenen Rollstuhlfahrern leicht zurückgelagert ist, kann der Arbeitsweg zudem in einen Zugund Druckbogen unterteilt werden.
Forschungsarbeiten aus dem Bereich Rollstuhlversorgung befassen sich unter anderem mit den Schwerpunkten Bewegung und Fortbewegung im Rollstuhl. Boninger et al. (1997) 11 untersuchten bspw. in einer Studie die dreidimensionalen Kräfte am Greifreifen. Sechs Paralympics-Athleten (5 Probanden mit traumatischer Rückenmarksverletzung, 1 Proband mit Spina bifida) mit uneingeschränkter Armfunktion waren als Teilnehmer in die Messungen inkludiert. Der Rollstuhl befand sich im Messaufbau auf einem stationären Dynamometer. Die Messung der kinetischen Daten erfolgte mittels eines Smartheel® (Fa. Three Rivers Holding). Synchronisiert dazu kam ein Drei-Kamera-Bewegungsanalysesystem zum Einsatz, um kinematische Daten der Probanden zu erfassen. Die Ergebnisse zeigen unter anderem, dass die für die Vorwärtsbewegung zuständige Tangentialkraft den größten Anteil der Gesamtkraft bei den untersuchten Probanden ausmacht (ca. 50 %) 12.
Russell et al. (2015) 13 analysierten die Anpassung der Vortriebstechniken beim Rollstuhlfahren bei Erhöhung der Geschwindigkeit. Für den Messaufbau wurde ein Leichtgewichtrollstuhl auf einem Ergometer montiert. Mittels Smart-Wheel® wurden während des Vortriebs kinetische Daten auf dem stationären Ergometer erfasst. Zusätzlich stand ein 3D-Bewegungsanalysesystem, bestehend aus sechs Kameras, zur Verfügung (Coda Motion Analysis, Fa. Codamotion Solutions). An der Messung nahmen 40 erfahrene manuelle Rollstuhlfahrer mit Querschnittlähmung (Level T2 bis L3) teil. Die Ergebnisse dokumentieren, dass sich bei 15 der 40 Probanden eine Steigerung von mehr als 10 Nm des Nettogelenkmoments der Schulter bei hoher Geschwindigkeit im Vergleich zur normalen Geschwindigkeit abbildete. Bei Betrachtung der Reaktionskräfte am Greifreifen zeigte sich darüber hinaus bei hoher Geschwindigkeit bei 22 von 40 Probanden eine Erhöhung von mehr als 10 N gegenüber der normalen Geschwindigkeit. Zudem verkürzte sich bei fast allen Teilnehmern (39 von 40) die Kontaktzeit am Greifreifen bei der höheren Geschwindigkeit 14.
Die Arbeitsgruppe Kawada et al. (2015) 15 hat sich mit dem Thema des Einflusses einer Sitzauflage beim stationären Sitzen im Rollstuhl und dem manuellen Rollstuhlvortrieb befasst. Synchron wurden kinematische Daten mit Hilfe eines 3D-Bewegungsanalysesystems (Fa. Vicon®) erfasst. Hierzu wurden 18 Probanden (17 männlich, 1 weiblich) mit halbseitiger Lähmung (9 linksseitig, 9 rechtsseitig), die durch unterschiedliche Krankheitsbilder entstanden waren, in die Studie inkludiert. Die Probanden wurden in einem ersten Test sitzend ohne Bewegung gemessen. Im zweiten Test wurden sie instruiert, den Rollstuhl mit drei einseitigen Fußvortriebszyklen im Messvolumen anzutreiben. Die Ergebnisse zeigten einen signifikanten Unterschied der Beckenneigung zwischen der stationären Situation (11.4° ± 3.9°) und den drei Vortriebszyklen (1. Zyklus: 13.5° ± 4.0°; 2. Zyklus: 13.6° ± 4.3°; 3. Zyklus: 13.7° ± 4.0°). Daraus schlussfolgerte die Arbeitsgruppe um Kawada, dass es durch die gewählte Sitzauflage beim einbeinigen Rollstuhlvortrieb zu einer kontinuierlichen Unterdrückung der Beckenvorkippung kommt 16.
Fragestellung
Das Hauptaugenmerk der vorliegenden Pilotstudie liegt auf der verwendeten Messtechnik zur Erfassung des Rollstuhlantriebs. Beim methodischen Vorgehen wurde dabei die Vortriebskraft beim Rollstuhlantrieb mit unterschiedlichen Greifpositionen und Oberkörperwinkeln in einen Zusammenhang gesetzt.
Methodik
Probandenkollektiv
Für die Untersuchung standen fünf Probanden zur Verfügung (einer weiblich, vier männlich). Alle waren zum Zeitpunkt der Messungen nicht auf den Rollstuhl angewiesen und hatten keinen regelmäßigen Umgang damit. Weitere Daten können Tabelle 1 entnommen werden.
Experimenteller Versuchsaufbau
Für die Untersuchungen wurde eigens ein experimenteller Aufbau entworfen. Der verwendete Aktiv-Rollstuhl (Modell „Avantgarde T“, Fa. Ottobock) wurde mittels einer sondergefertigten Achsenvorrichtung (siehe das grüne Bauteil in Abb. 1) über eine Federwaage fest mit dem Geländer der Gangstrecke im Institut für Messtechnik und Biomechanik an der Bundesfachschule für Orthopädie-Technik verbunden (Abb. 1). Des Weiteren wurde der Aufbau so realisiert, dass jedes der vier Räder des Rollstuhls auf einer Kraftmessplattform (Fa. Amti) stand. Dadurch konnte für jede Kraftmessplattform ein eigener Datensatz des Center of Pressure (COP) exportiert und für die Schwerpunktberechnung herangezogen werden. Markierungen auf den Antriebsrädern und den darunterliegenden Kraftmessplattformen sollten dabei gewährleisten, dass jede Messung mit der identischen Radstellung als Ausgangsposition vorgenommen wurde. Das Ablesen der aufgebrachten Antriebskräfte von der Federwaage erfolgte mit Hilfe einer Kamera.
Messtechnik
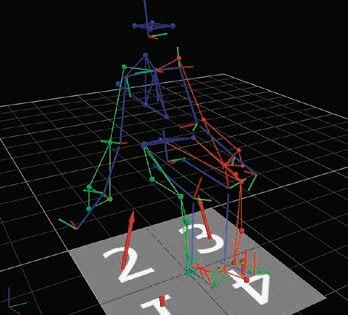
In den Versuchsaufbau waren vier Kraftmessplattformen der Firma Amti integriert, die mit einer Messfrequenz von 1000 Hz eine zeitlich hohe Auflösung der Bewegung realisierten, um den Verlauf des Gesamtkraftangriffspunkts zu messen. Zur Erfassung kinematischer Daten kam ein 3D-kinematisches Bewegungsanalysesystem der Firma Vicon zum Einsatz. Dieses bestand aus 12 Infrarotkameras, die das Messvolumen abdeckten, sowie zwei Videokameras von sagittal und frontal/dorsal zur Aufzeichnung der Bewegung. Als Markermodell wurde das Plug-in-Gait-Modell (PiG-Modell) 17 gewählt, um die Bewegung ganzheitlich abbilden zu können (Abb. 2).
Durch diesen Messaufbau konnte eine Analyse der aufgebrachten Antriebskraft sowie eine Berechnung des Gesamtschwerpunkts realisiert werden. Bei der Auswertung sollte die maximale Distanz in anteriorer bzw. posteriorer Richtung des Gesamtschwerpunkts im Hinblick auf den Oberkörperwinkel sowie die Antriebskraft untersucht werden. Ergänzend sollten die Positionen der Fingermarker betrachtet werden, um eine Aussage über die Startposition bei unterschiedlichen Greifpositionen treffen zu können.
Um die Reproduzierbarkeit der Messungen zu gewährleisten, wurde jede Messung nach einem standardisierten Protokoll durchgeführt. Zu Beginn fand eine Eingewöhnungsphase für jeden Probanden statt. Dabei instruierte das Messpersonal die Probanden, den Rollstuhl normal und kräftig sowie in normaler, hinterer und vorderer Greifposition anzutreiben. Die Dauer der Eingewöhnung betrug dabei ungefähr fünf Minuten; sie dauerte jedoch mindestens so lange, bis jeder Proband ein Gefühl von Sicherheit und Kontrolle erlangt hatte.
Insgesamt wurden drei Durchläufe (Trials) für jede Antriebsvariante aufgenommen. Die Reihenfolge der Messungen war dabei wie folgt festgelegt:
- normale Kraft, normale Greifposition
- normale Kraft, hintere Greifposition
- normale Kraft, vordere Greifposition
- maximale Kraft, normale Greifposition
- maximale Kraft, hintere Greifposition
- maximale Kraft, vordere Greifposition
Zur Betrachtung der Greifpositionen wurde jeweils der erste Datenpunkt des linken Fingermarkers aus der 3D-kinematischen Datenerfassung verwendet. Die rechte Seite ergab beim vorliegenden Probandenkollektiv nahezu identische Greifpositionen, sodass keine Asymmetrien zwischen rechter und linker Seite zu verzeichnen waren, die das Ergebnis hätten beeinflussen können.
Der sagittale Oberkörperwinkel wurde mit Hilfe des 3D-Bewegungsanalysesystems erfasst. Für die Auswertung wurde im System ein Markerstick für die Wirbelsäule sowie für den Oberschenkel generiert. Der Winkel zwischen diesen Sticks wurde dann als sagittaler Oberkörperwinkel angenommen. Die Berechnung des Körperschwerpunkts wurde mittels einer eigens für die Messreihe konzipierten Matlab®-Routine (Fa. MathWorks Inc.) realisiert.
Ergebnisse und Diskussion
Federwaage
Bei der Auseinandersetzung mit den erhobenen Daten wurde deutlich, dass eine eindeutige Trennung zwischen normalkräftigem und maximalkräftigem Antrieb mittels Federwaage in der Mittelwertdarstellung der Ergebnisse möglich ist. Diese Resultate belegen, dass die Umsetzung der instruierten Bewegungsaufgaben durch die Probanden wie gewünscht erfolgte. Im Hinblick auf die Greifposition bildeten die Ergebnisse der Federwaage jedoch keine erkennbaren Zusammenhänge zwischen Antriebskraft und Greifposition ab.
Greifposition
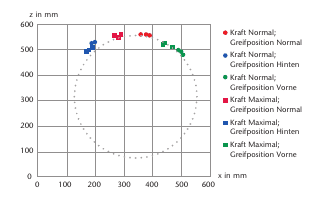
Die 3D-kinematischen Daten lassen erkennen, dass die Probanden sowohl während der maximalkräftigen als auch bei den normalkräftigen Antriebssituationen die drei Greifpositionen nach Anweisung ausführten (Abb. 3). Die Greifpositionen „hinten“ und „vorne“ zeigen in diesem Kontext probandenabhängige Unterschiede, die auf individuelle Gegebenheiten wie die Körpergröße zurückzuführen sind. Dennoch liegt bei jedem Probanden die Greif position „vorne“ vor und „hinten“ hinter der Greifposition „normal“. Diese Ergebnisse sind vergleichbar mit denen von Robertson et al. 18. So zeigen drei von fünf Probanden der vorliegenden Untersuchung mit normalkräftigem Vortrieb eine leicht vorgelagerte Greifposition, die auch Robertson et al. bei unerfahrenen Rollstuhlfahrern feststellen konnten 19.
Oberkörperwinkel
Aus den Ergebnissen der Messungen des Oberkörperwinkels lässt sich ableiten, dass es im untersuchten Probandenkollektiv zu einer größeren Vorbeugung bei den maximalkräftigen Messungen im Vergleich zu den normalkräftigen Messungen kam. Bei dieser Oberkörpervorneigung kam es jedoch ebenfalls zu einem kurzzeitigen Anheben der Rollstuhl-Vorderräder, was durch den gewählten experimentellen Aufbau bedingt war: Durch die Befestigung des Rollstuhls an der Achse der Antriebsräder wurden ein Abheben und dadurch auch eine verstärkte Verkleinerung des Oberkörperwinkels bei maximalkräftigem Antrieb beobachtet. Um den Rollstuhl als Nutzer stabil zu halten, war demzufolge die Oberkörpervorbringung eine der gewählten Strategien. Dieser Bewegungsmechanismus kann als Unterstützung des Vortriebs verstanden werden, um durch die Lastverschiebung größere Kräfte für den Antrieb generieren zu können. Doch auch bei jeder normalkräftigen Messung bewegten die Probanden den Oberkörper vor. Dies geschah jedoch in einem geringeren Ausmaß als bei den maximalkräftigen Messungen.
Zusätzlich zeigte sich hinsichtlich der Greifpositionen, dass 4 von 5 Probanden sowohl bei normalkräftigem als auch bei maximalkräftigem Antrieb in der hinteren Greifposition die größte Oberkörpervorbringung generierten. Aufgrund dieser rückwärtigen Greifposition kommt es zu einem schnellen Abheben der vorderen Räder. Dies veranlasst den Probanden dazu, eine größere Ausgleichsbewegung des Oberkörpers auszuführen, um die Balance zu halten. Innerhalb der Probandengruppe gab es hierbei deutliche Unterschiede in den Absolutwerten der Vorbeugemaxima. Grund dafür könnten unterschiedliche Strategien sein, die von den Probanden gewählt wurden, um den Rollstuhl in einer stabilen Lage zu halten.
Ähnlich wie bei Kawada et al. 20, die zwischen Statik (in Ruhe) und Dynamik (im Antrieb, hier: einbeiniger Fußantrieb) durch die Beckenneigung unterscheiden konnten, lässt sich der Oberkörperwinkel in der vorliegenden Untersuchung anwenden. Die Ergebnisse zeigen, dass es in der Dynamik (im Antrieb) beim Oberkörperwinkel wie auch bei der Beckenneigung zu einer deutlichen Veränderung (Beckenneigung: größere Werte; Oberkörperwinkel: kleinere Werte) im Vergleich zur Statik (in Ruhe) kommt. Und auch die von Russell et al. 21 geschlussfolgerten unterschiedlichen Strategien beim Rollstuhlantrieb mit Erhöhung der Geschwindigkeit können durch den erfassten Oberkörperwinkel unterstützt werden. Die Erhöhung der Rollstuhlgeschwindigkeit kommt hier der vorliegenden Pilotstudie der Änderung von normalkräftigem auf maximalkräftigen Antrieb gleich. Die Daten zeigen somit – wie auch in der Studie von Russel et al. – eine vergrößerte Oberkörpervorbeugung bei maximalkräftigem Antrieb im Vergleich zum normalkräftigen Antrieb.
Center of Pressure
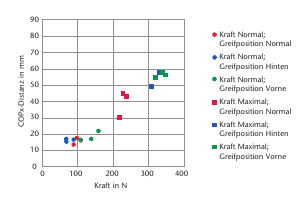
Für die Auswertung der COPx-Bewegung (x = in Fortbewegungsrichtung) in Bezug auf die Antriebskraft zeigte sich der erste Kraftimpuls als eindeutig bestimmbare Größe in allen Trials und wurde demzufolge als geeigneter Parameter für die Auswertung herangezogen. Dabei wies in der Auswertung (deskriptiv) lediglich Proband 1 einen nahezu linearen Zusammenhang zwischen der COPx-Distanz und dem ersten Kraftimpuls der Antriebskraft auf (Abb. 4). Das bedeutet, dass es zu einer Zunahme der COPx-Distanz bei zunehmender Antriebskraft kommt. Der Zusammenhang kommt zum einen durch eine höhere Kraft auf die Antriebsräder, zum anderen durch eine verstärkte Entlastung der Vorderräder zustande. Die Daten der übrigen vier Probanden weisen jedoch keinen derartigen Zusammenhang auf. Zwar weist ein Großteil der normalkräftigen Messungen ebenfalls eine geringere COPx-Distanz auf, doch sind die Datenpunkte nicht annähernd vergleichbar linear verteilt.
Limitationen
Die vorliegende Arbeit und deren Ergebnisse wurden durch verschiedene Faktoren limitiert: Zunächst ist das Probandenkollektiv als limitierender Faktor zu nennen. Die Größe der Proban dengruppe war mit n = 5 Teilnehmern eher klein, für diese Pilotuntersuchung jedoch ausreichend. Zudem waren die vermessenen Probanden nicht auf einen Rollstuhl angewiesen und hatten keine regelmäßigen Erfahrungen damit. Außerdem lag eine ungleiche gemischtgeschlechtliche Zusammensetzung (männlich n = 4; weiblich n = 1) vor.
Einen weiteren Faktor stellt der statische Versuchsaufbau dar: Durch den gewählten Versuchsaufbau konnten die Messbedingungen zwar gut kontrolliert werden, ein normales, ganzheitliches Vortreiben des Rollstuhls war jedoch aufgrund der Befestigung über eine Federwaage, die für die Validierung des Messaufbaus hilfreich war, nicht möglich. Es kam somit zu einem Anschlag, der beim vollständigen Rollstuhlvortrieb nicht stattfinden würde. Überdies zählt auch der Rollstuhl in gewisser Weise zu den limitierenden Faktoren: Zum einen wurden die Einstellungen des Rollstuhls zwecks Vergleichbarkeit für jeden Probanden identisch belassen und somit nicht individuell angepasst. Zum anderen wurde die Rückenlehne modifiziert, damit das gewählte Markermodell der 3D-kinematischen Datenerfassung genutzt werden konnte. Diese Modifizierung der Anstützgurte im Beckenbereich kann eine veränderte Sitzposition zur Folge gehabt haben. Das gewählte methodische Vorgehen war jedoch hinsichtlich der Vergleichbarkeit notwendig, um den Messaufbau adäquat prüfen zu können.
Fazit und Ausblick
Es kann abschließend festgehalten werden, dass die vermessenen Probanden innerhalb des experimentellen Versuchsaufbaus den Rollstuhl mit zwei unterschiedlichen Kraftniveaus – wie instruiert – antrieben. Dies konnte mit Hilfe der Federwaage belegt werden. Zur Erfassung und Auswertung der drei instruierten Greifpositionen (normal, hinten, vorne) erwies sich das genutzte 3D-kinematische System der Firma Vicon® als geeignet. Die Daten der Fingermarker ließen die drei Greifpositionen in der Auswertung deutlich erkennen und darstellen. Es ergab sich eine gute Reproduzierbarkeit der Greif positionen bei fast allen Probanden. Zusammenhänge zu den unterschiedlichen Kraftniveaus konnten jedoch nicht erkannt werden. Darüber hinaus zeigte sich der Einsatz des 3D-kinematischen Bewegungsanalysesystems mit dem gewählten Modell (PiG) als sinnvoll für die Erfassung des Oberkörperwinkels, sodass in den Ergebnissen sowohl ein Zusammenhang zwischen dem Oberkörperwinkel und der aufgebrachten Kraft als auch zwischen dem Oberkörperwinkel und den Greifpositionen abgebildet werden konnte. Die Erfassung des COPs mit Hilfe der eingesetzten Kraftmessplattformen konnte im vorliegenden Fall keine Zusammenhänge zu den übrigen untersuchten Parametern nachweisen. Da bisher jedoch nur der statische Fall untersucht wurde, sollte der selbst konzipierte Versuchsaufbau für weitere Untersuchungen des COPs beim Rollstuhlfahren weiterentwickelt werden. Zudem wäre es für Folgestudien wünschenswert, ein größeres Probandenkollektiv zur Verfügung zu haben und auch Rollstuhlnutzer zu vermessen.
Des Weiteren lässt diese Studie erkennen, dass rollstuhlspezifische Messysteme wie z. B. instrumentierte Greifreifen ihre Berechtigung in Studien und klinischen Analysen finden. Aus diesem Grunde sollen solche Messsysteme im Rahmen von Folgestudien in den hier genutzten Versuchsaufbau integriert werden, um die Messung von Antriebskräften zu erleichtern.
Weiterführend könnten die Messabläufe von der Statik hin zur Dynamik erweitert werden, um dem alltäglichen Rollstuhlfahren näher zu kommen. Zusammenfassend lässt sich festhalten, dass der selbst konzipierte Versuchsaufbau zur Analyse des Einflusses dreier Greifpositionen auf kinetische und kinematische Parameter beim Rollstuhlantrieb geeignet ist und perspektivisch durch technische und methodische Modifikationen weiterentwickelt werden sollte.
Der Autor:
Philipp Deters
Bundesfachschule für Orthopädie-Technik
Institut für Messtechnik und Biomechanik
Schliepstraße 6–8
44135 Dortmund
deters.philipp@mail.de
Begutachteter Beitrag/reviewed paper
Deters P, Hömme A‑K. Der Einfluss dreier Greifpositionen auf kinetische und kinematische Parameter beim Rollstuhlantrieb. Orthopädie Technik, 2017; 68 (12): 35–39
| Proband | Geschlecht | Körpergröße (cm) | Körpergewicht (kg) | Alter (Jahre) |
|---|---|---|---|---|
| 1 | männlich | 180,5 | 98 | 30 |
| 2 | weiblich | 163,0 | 55 | 25 |
| 3 | männlich | 171,0 | 74 | 25 |
| 4 | männlich | 175,0 | 89 | 23 |
| 5 | männlich | 194,0 | 104 | 28 |
| Mittelwert | 176,7 | 84 | 26,2 | |
| Standardabweichung | 10,36 | 17,67 | 2,48 | |

- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- Statistisches Bundesamt. Statistik der schwerbehinderten Menschen. Kurzbericht. 2011. Wiesbaden: Statistisches Bundesamt, 2013. https://www.destatis.de/DE/Publikationen/Thematisch/Gesundheit/BehinderteMenschen/SozialSchwerbehinderteKB5227101119004.pdf?__blob=publicationFile (Zugriff am 06.04.2017)
- Engström B. Ergonomie. Sitzen im Rollstuhl. Hässelby: Posturalis, 2001
- Engström B. Ergonomie. Sitzen im Rollstuhl. Hässelby: Posturalis, 2001
- Engström B. Ergonomics. Wheelchairs and Positioning. Hässelby: Posturalis, 1993
- Engström B. Ergonomie. Sitzen im Rollstuhl. Hässelby: Posturalis, 2001
- Engström B. Ergonomie. Sitzen im Rollstuhl. Hässelby: Posturalis, 2001
- Engström B. Ergonomie. Sitzen im Rollstuhl. Hässelby: Posturalis, 2001
- Engström B. Ergonomie. Sitzen im Rollstuhl. Hässelby: Posturalis, 2001
- Engström B. Ergonomics. Wheelchairs and Positioning. Hässelby: Posturalis, 1993
- Robertson RN, Boninger ML, Cooper RA, Shimada SD. Pushrim forces and joint kinetics during wheelchair propulsion. Archives of Physical Medicine and Rehabilitation, 1996; 77 (9): 856–864
- Boninger ML, Cooper RA, Robertson RN, Shimada SD. Three-dimensional pushrim forces during two speeds of wheelchair propulsion. American Journal of Physical Medicine & Rehabilitation, 1997; 76 (5): 420–426
- Boninger ML, Cooper RA, Robertson RN, Shimada SD. Three-dimensional pushrim forces during two speeds of wheelchair propulsion. American Journal of Physical Medicine & Rehabilitation, 1997; 76 (5): 420–426
- Russell IM, Raina S, Requejo PS, Wilcox RR, Mulroy S, McNitt-Gray JL. Modifications in Wheelchair Propulsion Technique with Speed. Frontiers in Bioengineering and Biotechnology, 2015; 3: 171
- Russell IM, Raina S, Requejo PS, Wilcox RR, Mulroy S, McNitt-Gray JL. Modifications in Wheelchair Propulsion Technique with Speed. Frontiers in Bioengineering and Biotechnology, 2015; 3: 171
- Kawada K, Matsuda T, Takanashi A, Miyazima S, Yamamoto S. Motion analysis of wheelchair propulsion movements in hemiplegic patients: effect of a wheelchair cushion on suppressing posterior pelvic tilt. Journal of Physical Therapy Science, 2015; 27 (3): 597–600
- Kawada K, Matsuda T, Takanashi A, Miyazima S, Yamamoto S. Motion analysis of wheelchair propulsion movements in hemiplegic patients: effect of a wheelchair cushion on suppressing posterior pelvic tilt. Journal of Physical Therapy Science, 2015; 27 (3): 597–600
- Plug-in-Gait Marker Placement. http://www.idmil.org/mocap/Plug-inGait+Marker+Placement.pdf (Zugriff am 13.07.2016)
- Robertson RN, Boninger ML, Cooper RA, Shimada SD. Pushrim forces and joint kinetics during wheelchair propulsion. Archives of Physical Medicine and Rehabilitation, 1996; 77 (9): 856–864
- Robertson RN, Boninger ML, Cooper RA, Shimada SD. Pushrim forces and joint kinetics during wheelchair propulsion. Archives of Physical Medicine and Rehabilitation, 1996; 77 (9): 856–864
- Kawada K, Matsuda T, Takanashi A, Miyazima S, Yamamoto S. Motion analysis of wheelchair propulsion movements in hemiplegic patients: effect of a wheelchair cushion on suppressing posterior pelvic tilt. Journal of Physical Therapy Science, 2015; 27 (3): 597–600
- Russell IM, Raina S, Requejo PS, Wilcox RR, Mulroy S, McNitt-Gray JL. Modifications in Wheelchair Propulsion Technique with Speed. Frontiers in Bioengineering and Biotechnology, 2015; 3: 171
