Gleichgewicht und Ungleichgewicht im Gangzyklus
Um die Herausforderung Treppe bzw. Schräge für einen Prothesenträger besser zu verstehen, ist es wichtig, den Gangzyklus unter den normalen Umständen eines zweibeinigen Ganges und unter dem Gesichtspunkt des Gleichgewichts und des Ungleichgewichts zu betrachten.
Der Gangzyklus erfordert eine stetige Bewahrung des Gleichgewichts. Ständig wird das Ungleichgewicht, das beim Gehen erzeugt wird, durch kompensatorische Bewegungen ausgeglichen. Der Körper erfährt eine zyklisch immer wiederkehrende Schwerpunktverlagerung. „Laufen ist nicht nur die rhythmische Bewegung der Hüft- und Kniegelenke, sondern eine Ganzkörperbewegung (…) in einem nahezu unsichtbaren Wechsel von Ungleichgewicht und Gleichgewicht” (www.gallerydiabolus.com/MAPPE1/ html/biomechanik.html) 1.
Gegen die Schwerpunktverlagerung beim Gehen nutzen wir in der Regel vier Aktivitäten 2: Sobald die Schwungphase für das eine Bein beginnt, bedeutet dies die Sicherung des Gleichgewichts durch das andere Bein, das Standbein. Dabei kommt es zu einer Vielzahl von Ausgleichsbewegungen, die im ganzen Körper vollzogen werden. Eine der wichtigsten Bewegungen in diesem Zusammenhang ist die Absenkung des Beckens auf der Schwungphasenseite. Die erste Strategie des Körpers gegen diese Schwerpunktverlagerung ist eine Vielzahl von Muskelkontraktionen, um den Körper stabil zu halten. Da die Muskelkontraktionen nicht ausreichend sind, kommt es zu einer Beckenverlagerung. Diese bewirkt eine Änderung der Position des Oberkörpers, um in der Schwerelinie des Körpers zu bleiben. Wenn diese beiden Aktivitäten nicht ausreichend sein sollten, kommt es zu einer weiteren Reaktion, dem Ausfallschritt. Dieser schützt uns vor dem Sturz, falls die Schwerpunktverlagerung nicht unter Kontrolle zu bekommen ist. Wenn auch der Ausfallschritt nicht ausreicht, müssen wir uns anlehnen oder abstützen. Falls dazu nicht die Möglichkeit besteht, kommt es zum Sturz.
Der beinamputierte Prothesenträger hat diese vier Funktionen in ihrer Gänze nicht zur Verfügung, da er eine so komplizierte und über die Gelenke des Beines verkettete Muskelkontraktion nicht ausführen kann. Knöchel- und Kniegelenk sind gar nicht ansteuerbar, das Hüftgelenk abhängig vom Muskelstatus des Stumpfes nur sehr bedingt.
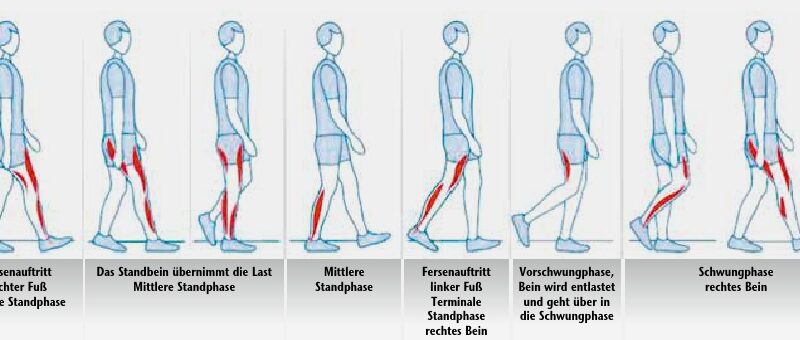
Um später verdeutlichen zu können, wie sehr sich das Gehen auf der Treppe vom Gang in der Ebene unterscheidet, sollte man sich den Gangzyklus der Ebene 3 vor Augen führen. Dieser ist gekennzeichnet durch die folgenden acht Phasen (Abb. 1):
- Initialer Kontakt (Fersenkontakt)
- Stoßdämpfungsphase
- Mittlere Standphase
- Terminale Standphase
- Vorschwungphase (Zehenablösung)
- Initiale Schwungphase
- Mittlere Schwungphase
- Terminale Schwungphase
Um einen Vergleich von Laufen auf der Ebene und Laufen auf der Treppe ziehen zu können, ist die Standphase von besonderem Interesse. Auf der Treppe ist nämlich die Standphase der Teil des Gangzyklus, der dem Betrachter und dem Anwender als sicherheitsrelevant am wichtigsten erscheint.
Die Abrollbewegung des Fußes in der Ebene während der Standphase beginnt an der Ferse und endet bei den Zehen mit der Zehenablösung. Auf der Treppe werden wir feststellen, dass sich eine andere Abfolge ergibt.
Treppengehen ist die Ausnahmesituation des Gehens
Treppengehen stellt für die untere Extremität eine deutlich höhere Belastung dar als das Gehen in der Ebene. Das Hüftgelenk wird auf der Treppe beim Hinauf- und beim Hinabgehen um bis zu 300 % mehr belastet als beim Gehen in der Ebene, beim Hinsetzen, Aufstehen oder sogar bei Kniebeugen 4.
Das Kniegelenk wird beim Treppabgehen bis zum 3,5‑Fachen des Körpergewichtes belastet 5. Der oberschenkelamputierte Prothesenträger steht dabei vor einer noch größeren Herausforderung. Er kann eine solche Belastung nicht mehr erfühlen, dämpfen oder durch kompensatorische Bewegungen ausgleichen. Diese Aufgabe muss das Prothesengelenk übernehmen. Doch kann es das überhaupt? Die moderne Prothetik hat darauf mittlerweile eine Vielzahl von Antworten gefunden; wir sprechen dabei vom „alternierenden Treppengehen”, das heißt, das Bein mit der Prothese wird nicht Stufe für Stufe “nachgezogen”, sondern beide Beine bewältigen die Stufen im Wechsel. Mit dem entsprechenden Training können Prothesenanwender dies erreichen.
Gangzyklus Treppe hinunter
Zunächst nehmen wir den Gangzyklus beim Treppabgehen in den Blick. Natürlich sind wir unter normalen Umständen in der Lage, eine Treppe hinunterzugehen, ohne vorher viele Überlegungen anzustellen. Dennoch schauen wir uns eine unbekannte Treppe zuerst von oben an, bevor wir hinuntergehen. Ein Prothesenträger tut dies sehr bewusst, um Tiefe, Breite und Anzahl der Stufen einschätzen zu können. Man kann daher von einer Schritteinleitung sprechen. Auch wenn sie streng genommen nicht zum Gangzyklus gehört, hat die Schritteinleitung ihren Platz in diesem Zyklus. Die folgenden Phasen des Treppengangzyklus treffen sicher nicht auf jeden Fußgänger zu, lassen sich aber bei der Mehrzahl der Personen wie folgt beschreiben (Abb. 2a – g):
- Schritteinleitung
- Fersenablösung
- Zehenablösung
- Vorschwung
- Initiale Lastübernahme
- Mittlere Standphase
- Terminale Standphase
Nach der terminalen Standphase beginnt der Zyklus wieder mit der Fersenablösung. Wir beobachten hier also keine 8 Phasen mehr wie beim Gangzyklus in der Ebene, sondern nur noch 6.
In vielen Elementen unterscheidet sich der Treppenzyklus vom Gangzyklus in der Ebene. Besonders fällt der initiale Kontakt nach der Schwungphase auf: Auf der Treppe findet die initiale Lastübernahme nicht mit der Ferse statt, sondern mit dem Vorfuß. Der genaue Kontaktpunkt am Fuß hängt zudem mit der Tiefe und Breite der Stufe zusammen. Je schmaler die Stufe, umso mehr wird der Kontaktpunkt im vorderen Zehenbereich liegen, denn desto größer muss die Plantarflexion sein.
Treppe hinunter mit Beinprothese
Was für eine nichtamputierte Person also schon eine gangtechnische Ausnahmesituation ist, bedeutet für den Prothesenträger eine deutlich höhere Herausforderung. Der oben gezeigte Gangzyklus auf der Treppe trifft nämlich für den Prothesenträger nicht zu. Bei ihm entsteht ein ganz anderer Gangrhythmus (Abb. 3a – f).
Der Zyklus beginnt mit zwei Vorphasen. Die erste und durchaus wichtige Vorphase ist auch hier die Schritteinleitung (a). Der Anwender schätzt dabei die Treppe ein und positioniert sich und die Prothese, um den Abstieg beginnen zu können. Die zweite Vorphase ist die Fußablösung (b). Dies sind Vorphasen, da sie im Laufe des Abstiegs auf dem Treppensegment nur zu Beginn vorkommen. Sie können auch als vorbereitende Schritte bezeichnet werden. Die stets wiederkehrenden Phasen sind die drei folgenden: Vorschwung (1) des Prothesenfußes, Lastübernahme (2) im Fersenbereich, Überrollphase (3) des Fußes über die Treppenstufenkante. Danach beginnt der Zyklus von vorne. Nach der Überrollphase muss der Fuß wieder in den Vorschwung gebracht werden, um danach wieder im Fersenbereich die Körperlast zu übernehmen.
Der Gangzyklus des Prothesenträgers auf der Treppe besteht also nur noch aus 3 immer wiederkehrenden Phasen. Es ist somit ein sehr verkürzter Zyklus im Gegensatz zum nichtamputierten Treppengeher. Man kann zwar auch hierbei von einem alternierenden Treppabgehen sprechen, aber physiologisch ist es deswegen nicht. Der Zyklus im Überblick:
- Schritteinleitung
- Fersenablösung
- Vorschwung
- Lastübernahme
- Überrollphase
Dann wieder 1. Vorschwung usw.
Der größte Unterschied, der auch im Praxisverhalten und im Anwendertraining durch den Techniker vermittelt werden muss, ist sicherlich die Lastübernahme. Der Prothesenträger muss nämlich gezielt mit der Ferse bzw. mit dem letzten Drittel des Fußes auftreten, um die Überrollphase über den Schwerpunkt hinweg auslösen zu können.
Was muss ein Prothesenkniegelenk leisten?
Im Folgenden wird auf die Leistungsfähigkeit des Kniegelenkes eingegangen, indem zunächst die muskulären Reaktionen in den Momenten betrachtet werden, in denen das Kniegelenk zum sicheren und dynamischen Treppabgehen seine Funktionen unter Beweis stellen muss. Welche Hauptmuskeln werden in welcher Bewegungsphase beim nichtamputierten Geher eingesetzt?
Initiale Lastübernahme
(siehe Abb. 2e)
M. tibialis anterior (Dorsalextension)
M. glutaeus max. (Hüftextension)
M. quadriceps (Flexionskontrolle, Flexionsmoment Knie)
Mittlere und terminale Standphase
(siehe Abb. 2f u. g)
M. quadriceps (gesteigertes Flexionsmoment Knie)
Die Kontraktion der Muskulatur kontrolliert und sichert das Gleichgewicht. Der Körper wird jederzeit in seinem Schwerelot gehalten. Es gibt, auch beim Treppabgehen, keinen Moment, in dem der Geher gezwungen ist, den Sicherheitsbereich seiner Unterstützungsfläche zu verlassen. Wenn der Vorwärtsschritt auf die nächste Stufe nach unten erfolgt, ist jederzeit der Ausgleich durch Muskelkontraktion vorgesehen und unter physiologischen Umständen durchführbar.
Diese umfangreiche Muskelaktivität ist dem Oberschenkelamputierten nicht möglich, da die knie- und fußübergreifende Muskulatur nicht vorhanden ist. Das Prothesenkniegelenk muss diese sicherheitsrelevante Aufgabe übernehmen. Hier wird die Wichtigkeit der Kniegelenksfunktion bereits deutlich.
Welche Hauptmuskeln müssen in welcher Bewegungsphase beim amputierten Gehen eingesetzt werden?
Lastübernahme
(siehe Abb. 3d)
M. glutaeus max. (Hüftextension) kein knieübergreifender M. quadriceps (Flexionsmoment Knie)
Überrollphase
(siehe Abb. 3e)
M. glutaeus max. (Hüftextension) kein knieübergreifender M. quadriceps (gesteigertes Flexionsmoment Knie)
Unter Berücksichtigung von Sicherheit und Dynamik steht in diesen beiden Phasen das Kniegelenk in seiner Funktionsweise am stärksten im Fokus. Dem Prothesenträger fehlt die entsprechende Muskulatur, um den Körper kontrolliert auf die nächste Stufe herabsinken zu lassen.
Anhand der Abbildung 4 wird deutlich, dass der Prothesenträger, um die Treppe mit Prothese dynamisch hinabzusteigen, eine andere Strategie anwenden muss. Er muss das Kniegelenk als „Flexionskontrollwerkzeug” benutzen und dafür auf jeder Stufe in Stellung bringen. Dies tut das Kniegelenk, auch wenn es elektronisch gesteuert ist, nicht von allein. Der Anwender muss fähig sein, die Prothese zu beherrschen und gezielt einzusetzen. Wenn er also die Treppe bewältigen will, muss er die eigentlich so gefürchtete Knieflexion in einem für ihn nicht mehr sicheren Bereich selbst erzeugen. Dies erfordert Übung und viel Vertrauen in ein technisches Gerät.
Die Schwerelinie des Anwenders befindet sich im Moment der Lastübernahme mit der Ferse des Prothesenfußes nicht mehr im Unterstützungsbereich. Im Moment der Lastübernahme wäre eigentlich die Muskelkontraktion notwendig, um die Knieflexion zu bremsen bzw. zu kontrollieren. Dafür ist nun das Prothesenkniegelenk zuständig, wie Abbildung 4 zeigt.
Ein Prothesengelenk, das zum alternierenden Treppabgehen verwendet werden kann, muss somit folgende fünf Grundvoraussetzungen erfüllen:
- Flexionskontrolle = einstellbare oder autoadaptive Standphasendämpfung
- Schwungphasenkontrolle
- schnelle Reaktionszeiten
- Verlässlichkeit für den Anwender
- Nutzerfreundlichkeit für den Anwender
Was muss der Prothesenschaft leisten?
Für einen Prothesenträger sind beim Überwinden von Alltagshindernissen wie im Fall einer Treppe die Form des Prothesenschaftes, die Stumpflänge und der Muskelstatus des Anwenders wesentlich. Bei den in diesem Artikel beschriebenen Beobachtungen eines Prothesenanwenders handelt es sich um einen knieexartikulierten Anwender mit einem Genium-Kniegelenk und einem Fußpassteil Triton Low Profile, beides von Otto Bock.
Für den knieexartikulierten Anwender sind gute Hebelverhältnisse durch einen langen Stumpf, ein guter Muskelstatus und die Tragfähigkeit des Stumpfendes auch auf der Treppe von Vorteil. Durch das tragfähige Stumpfende erlebt er, auch propriozeptiv, das Auftreten und die erhöhte Belastung beim Überwinden von Treppen viel direkter als ein transfemoral amputierter Anwender.
Bei einem transfemoral amputierten Anwender sollte ein Schaft eingesetzt werden, der nach dem hydrostatischen Prinzip das Anwendergewicht per Vollkontakt tragen kann. Das Gewicht wird also vom ganzen Stumpf übernommen. Dadurch fällt die Gewichtsübertragung von der Bodenreaktionskraft über den Schaft auf den Stumpf anders aus als bei einer Knieexartikulation, bei der ein direkter Kontakt der distalen Gelenkfläche der Femurkondylen mit dem Schaftboden besteht.
Je kürzer der Stumpf ist, desto weniger Hebellänge steht dem Anwender zur Verfügung und desto weniger kann der vorhandene Muskelstatus genutzt werden. Die Schaftform kann bei transfemoral amputierten Patienten für das Bewältigen von Hindernissen entscheidend sein, wenn die anatomischen Gegebenheiten nicht ausreichend berücksichtigt sind und keine ausreichende Übernahme des Körpergewichts durch den Schaft gewährleistet wird. Der Anwender ist beim Hinabsteigen der Treppe darauf angewiesen, da er einen nicht passenden Schaft durch schnelle Belastungsrücknahme auf das gesunde Bein nur schwer kompensieren könnte. Um die Treppe unter den oben beschriebenen Sicherheitsaspekten hinuntergehen zu können, muss er die Prothese in den Belastungsphasen voll belasten können. Das Gleiche gilt für die Haftung des Schaftes bei den Entlastungsphasen des Treppenzyklus. Wenn die Prothese nicht genügend haftet und eine Hubbewegung beim Entlasten der Prothese auftritt, ist die Einleitung der Stand- und Belastungsphasen nur mit großem Unsicherheitsgefühl oder gar nicht möglich. Dann wäre das alternierende Treppabgehen trotz eines mikroprozessorgesteuerten Kniegelenks nicht durchführbar.
Fazit
In der Ebene kann eine Oberschenkelprothese die Physiologie des Gehens sehr gut nachbilden. Beim Hinuntergehen einer Treppe ist das nicht der Fall. „Alternierend” darf nicht mit „physiologisch” verwechselt werden. Der Zyklus, der auf der Treppe entsteht, ist grundsätzlich anders als bei einem zweibeinigen Geher und mit einem Prothesenkniegelenk nicht in seiner Gänze nachzuahmen.
Um ein physiologischeres Gehen zu erzielen, ist aber nicht nur das Kniegelenk ein hinderlicher Faktor, sondern auch das Fußpassteil. Die Fußpassteile sind nicht in der Lage, die initiale Lastübernahme mit dem Vorfuß aufzufangen, sondern bedürfen immer der Positionierung des Fußes im hinteren Drittel, um die Überrollphase überhaupt einleiten zu können. Wenn dies nicht geschieht, ist der Vorfußhebel zu groß, und das Kniegelenk kann nicht in die Standphasendämpfung bzw. Flexion gebracht werden.
Hervorzuheben ist für den Prothesenanwender, den Techniker und auch den Kostenträger sicherlich die besondere Bedeutung der Bewältigung von Treppen. Die Treppe ist bei mikroprozessorgesteuerten Kniegelenken meistens das Maß der Dinge für den Kostenträger. Eine Treppe alternierend hinauf- oder hinabgehen zu können ist für den Prothesenträger ein sehr großer Gewinn an Lebensqualität. In der Entscheidungsfindung, ob für einen Oberschenkelamputierten ein hochpreisiges Kniegelenksystem von Nutzen ist, spielt das Laufen auf der Treppe eine Schlüsselrolle.
Der Autor:
Maik Pollmeyer
Orthopädie-Technik Münsterland
Bültzingslöwen GmbH, Duisburg
Fuggerstraße 15
48165 Münster
maik.pollmeyer@otmuensterland.de
Begutachteter Beitrag/Reviewed paper
Pollmeyer M. Das Überwinden von Treppen mit Beinprothesen. Orthopädie Technik, 2014; 65 (6): 44–49














- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Lippmann R. Das Ergonomieprogramm ANTHROPOS, ein Visualisierungswerkzeug auch für Mediziner. In: Jerosch J, Nicol K, Peikenkamp K (Hrsg.). Rechnergestützte Verfahren in Orthopädie und Unfallchirurgie. Darmstadt: Steinkopff Verlag, 1999: 173–189. http://link.springer.com/chapter/10.1007/978–3‑642–58699-6_11
- Lippmann R. Das Ergonomieprogramm ANTHROPOS, ein Visualisierungswerkzeug auch für Mediziner. In: Jerosch J, Nicol K, Peikenkamp K (Hrsg.). Rechnergestützte Verfahren in Orthopädie und Unfallchirurgie. Darmstadt: Steinkopff Verlag, 1999: 173–189. http://link.springer.com/chapter/10.1007/978–3‑642–58699-6_11
- Götz-Neumann K. Gehen verstehen. Ganganalyse in der Physiotherapie. Stuttgart: Thieme, 2003
- Klein P, Sommerfeld P. Biomechanik der menschlichen Gelenke. Grundlagen, Becken, untere Extremität. München: Elsevier/Urban & Fischer, 2004
- Brinkmann P, Frobin W, Leivseth G, Drerup B. Orthopädische Biomechanik. Münster: WWU, 2012
