Einleitung
Fortschritte in Wissenschaft und Technik werden häufig dadurch erreicht, dass Wege aus Entdeckungen und Theorien fort- und zusammengeführt werden. Diese Wege verlaufen oftmals lange Zeit parallel. Auch in der Orthopädie-Technik sorgen sogenannte kumulative Entwicklungswege für technische Neuheiten. So wurde z. B. die Versorgung von Armamputierten seit der Einführung myoelektrischer Armprothesen im Jahr 1968 1 innerhalb von nur zehn Jahren revolutioniert. Diese Prothesen sind das Ergebnis kumulativer Entwicklungen, die unterschiedlichen Disziplinen, Orten und Epochen zuzuordnen sind. Erste Versuche, den Fingerschluss künstlicher Hände mit Elektromagneten zu erzeugen, wurden bereits in den 1920er Jahren vorgenommen 2. Das Thema elektrisch angetriebener Armprothesen wurde jedoch erst nach dem Zweiten Weltkrieg erneut aufgegriffen 3. In den USA konnte unter finanzieller Förderung durch die Regierung ein erstes, elektrisches Armprothesenmodell erprobt werden. Dieses konnte sich allerdings wegen des Fehlens einer bewussten und direkten Steuerung nicht durchsetzen 4, obwohl es bereits ein Jahrhundert zuvor, im Jahr 1849, gelungen war, elektrische Signale infolge von Muskelkontraktionen aufzuzeichnen 5. Das Potenzial der Verwendung der Elektromyographie (EMG) als Nutzsignal für eine Steuerung wurde also trotz ihrer Existenz lange Zeit nicht erkannt. Erst 1958 ebnete die Zusammenführung einer elektrisch betriebenen Hand mit einer EMG-Steuerung in der Sowjetunion weitere Forschungsbemühungen in Großbritannien, Kanada, Deutschland, Österreich, Italien und den USA 6, was den Durchbruch für die heute allseits eingesetzten myoelektrischen Prothesen bedeutete. Nicht nur durch die zuletzt eingeführten, multiartikulierenden Handprothesen liegt gegenwärtig erneut ein kumulativer Technologiefortschritt in der Luft. Der Eindruck wird durch den „Technologie-Boom“ im Bereich der Mikroelektromechanik und durch die zunehmend öffentliche und teils sensationsgetriebene Berichterstattung aus Wissenschaft und Forschung verstärkt.
Um der Sache auf den Grund zu gehen, greift der vorliegende Artikel einige Strömungen aus Wissenschaft und Forschung in der Handprothetik auf. Diese lassen sich auf Neuigkeiten bei den Steuerungssystemen, bei den Feedbacksystemen und in der Robotik begrenzen, weil hier zur Zeit die deutlichsten Forschungsaktivitäten in Erscheinung treten. Auch mit Blick auf die Erwartungshaltung mancher Patienten wollen die Autoren damit dem Fachpublikum eine kritische Auseinandersetzung mit potenziellen Zukunftstechnologien ermöglichen.
Prinzipien der Prothesensteuerung
Bei der großen Mehrzahl heutiger Armprothesen auf myoelektrischer Basis kommen zwei EMG-Elektroden zum Einsatz, um die Aktionspotenziale antagonistischer Muskelpaare zur Prothesensteuerung zu nutzen (z. B. Mm. flexor carpi radialis und extensor digitorum bei transradialer Amputation oder Mm. pectoralis und trapezius bei Schulterexartikulation). Die Signale werden gefiltert und individuell verstärkt einer Steuerelektronik zugeleitet, die einen On-Off-Kontrollmechanismus für einen beliebigen Bewegungsfreiheitsgrad generiert. Jedoch können zwei oder mehrere Freiheitsgrade der üblichen, myoelektrischen Handprothesen (z. B. Öffnen und Schließen der Hand, Rotation des Handgelenks oder Beugung und Streckung des Ellenbogengelenks) oder der multiartikulierenden Hände auf diese Weise nicht simultan kontrolliert werden. Zwischen den Freiheitsgraden kann zwar mittels Umschaltung (z. B. durch Kokontraktion der Antagonisten oder durch beliebige Schwellenwerte) gewechselt werden, sodass eine sequenzielle Kontrollstrategie möglich wird. Diese lässt die Prothesenbewegung aber größtenteils unnatürlich und langsam erscheinen 7, was mitunter zur Ablehnung myoelektrischer Armprothesen führt 8.
Aktivierungsmuster und Muskelsynergien
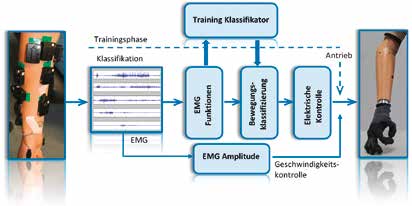
Demgegenüber schreien multiartikulierende Handprothesen – die inzwischen verschiedenste Greifmuster und einzelne Fingerbewegungen ausführen können – geradezu nach einer simultanen oder gar einer multimodalen Steuerung. Dennoch gibt es diesbezüglich noch keinen nennenswerten Durchbruch – auch wenn solche Steuerungen schon seit Jahrzehnten auf unterschiedlichste Weise erforscht werden. Eine dieser Methoden ist die Erkennung bewegungstypischer EMG-Muster 9. Obwohl die menschliche Hand mehr als 20 Freiheitsgrade besitzt 10, kontrolliert das zentrale Nervensystem (ZNS) nicht jeden einzelnen Freiheitsgrad, sondern vielmehr das Zusammenwirken der Muskeln („Synergien“), die gleichzeitig Einfluss auf mehrere Freiheitsgrade nehmen 11. Dazu sind kodierte Synergien im ZNS abgelegt, die aufgabenspezifisch abgerufen und kombiniert werden können, sodass entsprechende Kontraktionsmuster die kinematische Aufgabe der Hand erfüllen 12. Um diese Synergien für die simultane Kontrolle mehrerer Prothesenfreiheitsgrade nutzbar zu machen, müssen die Aktivierungsmuster der Muskulatur zunächst verschiedenen Bewegungsklassen zugeordnet werden 13. Dazu bedarf es einer initialen Trainingsphase, in der ein Klassifikator mit Hilfe maschineller Lernalgorithmen verschiedene Positionen und Bewegungen der Prothese mit myoelektrischen Aktivierungsmustern korreliert. Dieser Bezug kann dann in eine alltägliche Prothesensteuerung übernommen werden (Abb. 1). Aktuelle Mustererkennungsalgorithmen sind in der Lage, Muskelsynergien mit einer Genauigkeit von über 90 % in zuvor definierte Bewegungsklassen einzuordnen 14. Dennoch haben sich daraus ableitbare Steuerungsmechanismen bis heute nicht in kommerziell verfügbaren Prothesensystemen etabliert 15. Denn noch limitieren die enorm aufwendigen Algorithmen (ungenügende Echtzeitkontrolle) und die Komplexität der Muskelsynergien des Arms in Kombination mit sogenannten Cross-Talk-Effekten beim Oberflächen-EMG (sEMG) die Verwendbarkeit im Alltag 16 17. Nicht weniger wichtig wären allgemeingültige, vorprogrammierte Grundlagen für das maschinelle Lernen, die eine deutliche Verkürzung der enorm aufwendigen Trainingsphasen für Patienten zur Folge hätten und nur durch weitere Forschungsbemühungen erzielbar wären 18. Ungeachtet dessen scheint eine klinische Umsetzung an der Schwelle eines Durchbruchs zu stehen, da sich die Gebiete Signalverarbeitung, Multichannel-Instrumentierung und Mikroprozessortechnologie zuletzt rasant weiterentwickelt haben 19 20. So stellt das seit 2015 erhältliche „Coapt“-System (Coapt LLC, Chicago, USA) ein „Stand-Alone-Produkt“ dar, das mit bis zu acht EMG-Elektroden eine simultane Ansteuerung mehrerer Freiheitsgrade ermöglicht 21.
Selektiver Nerventransfer (TMR)
Oftmals können für Unterarmprothesen genau die Muskeln verwendet werden, die bereits vor der Amputation für entsprechende Handbewegungen zuständig waren. Diese gehen bei höheren Amputationen jedoch verloren, sodass eine intuitive Steuerung mittels Mustererkennungsalgorithmen unmöglich wird. Hier stellt die TMR-Methode (TMR = Targeted Muscle Reinnervation) mittlerweile einen relevanten Fortschritt dar: Mittels eines operativen Eingriffs werden dabei Motoneuronen verlorengegangener Muskeln an verbliebene (z. B. des Oberarms oder des Oberkörpers) transferiert 22. Diese Muskeln erzeugen Aktionspotenziale infolge motorischer Befehle der transferierten Neuronen und fungieren somit quasi als ihre Verstärker für die Ableitung von EMG-Signalen. Nicht ohne Grund wird die TMR-Methode deshalb auch als Wegbereiter für eine „gedankengesteuerte Prothese“ aufgefasst. Sie bietet die Möglichkeit, EMG-Signale entsprechend ihrer eigentlichen kinematischen Zugehörigkeit wieder nutzbar zu machen, sodass eine intuitive und simultane Prothesensteuerung mittels detektierbarer Aktivitätsmuster möglich ist 23.
Multimodale Steuerung
Eine weitere Optimierung erfährt ein solches, maschinelles Lernsystem durch Multimodalität, womit die Berücksichtigung eines oder mehrerer Zusatzparameter für die Steuerung gemeint ist. Dadurch können störende Effekte aufgrund der Extremitätenlage reduziert werden. Diese entstehen z. B. durch relative Lageveränderungen der Weichteile zu den sEMG-Elektroden oder auch durch unterschiedliche Ausgangspositionen der Prothese, aus denen eine Bewegung mit ihr initiiert werden soll. Ein System, das anhand nur einer Ausgangsposition trainiert wird, kann folglich nicht auf verschiedene Armpositionen im Alltag generalisiert werden 24. Dieser Problematik kann durch eine Kombination der sEMG-Signale mit Lageparametern (per Inertialsensorik) 25 oder mit Signalen aus der Elektroenzephalographie (EEG) 26 entgegengewirkt werden, was zu einer signifikanten Steigerung der Klassifikationsgenauigkeit führt. Eine besonders gute Möglichkeit zeichnet sich hier aktuell durch das Mapping von Greifbewegungen anhand neuronaler Aktivierungsmuster im primären motorischen Kortex ab 27. Ferner bietet die Sonomyographie einen vielversprechenden Ansatz, zusätzlich die Aktivität auch tiefer gelegener Muskeln über ihre lokale Dickenveränderung zu detektieren. Mit ihr allein können Hand- und Fingerbewegungen schon mit einer Genauigkeit von über 80 % klassifiziert werden 28 29. Auch wird mit instrumentierten Prothesenhänden, welche mit Kameras 30 oder mit Lichtwellenleitern 31 ausgestattet sind, versucht eine vom Greifobjekt abhängige und automatisierte Greifsteuerung zu etablieren. Mit deren Hilfe sind künstlich erschaffene, neuronale Netzwerke mit Klassifizierungsgenauigkeiten von über 90 % trainierbar 32.
Schnittstellen
Klinisch gesehen verlagert sich zudem die Erforschung der „Mensch-Maschine–Schnittstelle“ zunehmend in den Körper hinein. Auf dieser Ebene können z. B. implantierbare Elektroden-Cluster inzwischen die Nachteile der sEMG-Elektroden kompensieren 33 34 oder für eine Elektroneurographie (ENG) sogar direkt in periphere Nervenbahnen implantiert werden 35. Absolut experimentellen Charakter haben dagegen verschiedene Einzelversuche, in denen die Steuerung künstlicher Glieder mit einer direkten Anknüpfung an das Nervensystem bewerkstelligt wird. Mittels Gehirn-Computer-Schnittstellen (Brain-Machine-Interfaces, BMI) kann die Gehirnaktivität z. B. mit implantierbaren Chips 36 oder per Elektrokortikographie (ECoG) 37 erfasst und zur Erzeugung von Steuersignalen in Robotik und Prothetik genutzt werden.
Feedbacksysteme
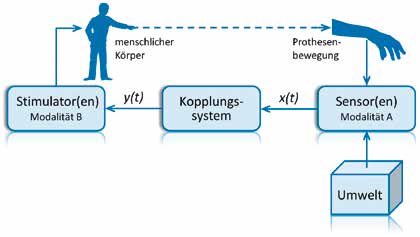
Mit der Amputation geht das somatosensorische System der Hand und damit ein unvorstellbar großer Teil der sensorischen Rückkopplungskontrolle verloren. Es ist Teil eines körpereigenen, posturalen Regelkreises und schließt neben Propriozeptoren verschieden schnelle Mechano‑, Thermo- und Nozizeptoren ein. Kommt nach einer Amputation eine Armprothese zum Einsatz, so ist es beim aktuellen Stand der verfügbaren Technik unmöglich, auch nur einen Bruchteil des somatosensorischen Systems zurückzugewinnen oder gar zu imitieren. Auch wenn seine Entschlüsselung stetig voranschreitet 38, ist das enorm komplexe Zusammenspiel der Tastkörperchen der Hand, die sich in mindestens vier mechanorezeptive Neuronenklassen unterteilen lassen 39, bis heute weitgehend unklar. Diese Unkenntnis wird auch nicht dadurch verringert, dass mitunter versucht wird, biomimetische Mechanorezeptoren herzustellen 40. Selbst wenn dies irgendwann mehr oder weniger gelänge, bliebe es weiterhin unklar, mit welcher Kodierung an welcher Stelle 41 eine mikrochirurgische Kopplung an die verbliebene Afferenz erfolgen müsste, um eine wirklichkeitsnahe Tastempfindung im somatosensorischen Kortex auszulösen. Aktuelle Bemühungen ein taktiles oder haptisches Feedback dennoch zu ermöglichen greifen deshalb das Konzept der sensorischen Substitution auf 42. Darunter wird die Übertragung von Informationen eines verloren gegangenen Sinnesorgans auf ein anderes Sinnesorgan verstanden. Dem Amputierten wird somit mittels technischer Komponenten ermöglicht, den durch die Amputation unterbrochenen Regelkreis über eine Art „Workaround“ wieder zu schließen. In der Minimalform besteht ein solches Substitutionssystem aus drei Komponenten: einem taktilen Sensor, einem Kopplungssystem und einem Stimulator (Abb. 2). Das besondere Merkmal für die Systemwirksamkeit ist seine Interaktionsschleife. Sie gilt als geschlossen, wenn eine posturale Prothesenkontrolle durch den Patienten erzielbar ist (siehe die gestrichelte Linie in Abb. 2).
Taktile Sensoren
Abstrahiert man z. B. die Informationen, die für das Greifen und Manipulieren eines Objekts notwendig sind, so sind in erster Linie das Kontaktereignis, die Oberflächen- und Elastizitätsbeschaffenheit des Objekts sowie die Greifkräfte von Bedeutung. Hier sind zuletzt diverse Sensoren entwickelt und erforscht worden, mit denen entweder eine oder mehrere Informationen gleichzeitig geliefert werden oder in Kombination angewendet werden können. So ist z. B. „ThimbleSense“ ein von außen auf die Finger aufsteckbares oder auch in die Prothesenhand integrierbares Sensorsystem 43. Durch seinen Aufbau können Normalkräfte und der lokale Druckpunkt erfasst werden, wodurch Informationen über resultierende Scherkräfte und Drehmomente an den Fingerkuppen zur Verfügung stehen. Obwohl übereinstimmende Greifkräfte mit und ohne System anhand von Probanden erfassbar sind, stehen Analysen mit Prothesenhänden noch aus.
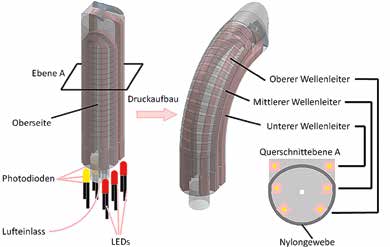
Ein weiteres Beispiel ist ein von der Raumfahrt inspiriertes System in Verbindung mit einer Soft-Roboter-Hand, das aus instrumentierten Lichtwellenleitern mit LEDs besteht 44 (Abb. 3). Über die Veränderung der Lumina der Lichtwellenleiter im elastischen Roboterfinger können gleichzeitig differenzierte Signale über die Fingerstreckung und ‑beugung (Propriozeption), über die Kräfte an den Fingerkuppen und sogar über haptische Objekteigenschaften wie Form, Elastizität und Textur (Mechanozeption) optoelektronisch erzeugt werden. Ein anderes Konzept wird beim Modell „SoftHand Pro“ verfolgt 45: Die Signalgebung über die aufgebrachte Greifkraft wird dabei anhand des aufgenommenen Motorstroms der Hand generiert. Kontaktereignisse und die Greifkraft sind detektierbar, weil der Strom bei Greifbewegungen mit Objekt messbar größer ausfällt als bei Greifbewegungen bei denen kein Objekt im Spiel ist 46.
Stimulatoren für das Feedback
Vibrotaktile, elektrotaktile und kraftübertragende Stimulatoren werden derzeit experimentell am häufigsten untersucht, weil sie den Vorteil der Nichtinvasivität bieten 47. Ein vibrotaktiles System kann kostengünstig z. B. durch kleine Vibrationsmotoren aus dem Consumer-Bereich zusammengestellt werden, die einzeln 48 oder als Array [39, 40, 41] mittels einer Bandage am Arm befestigt werden. Je nachdem, ob dem Nutzer die Handöffnungsweite 49, das Kontaktereignis 50 51 und/oder verschiedene Greifkräfte 52 53 54 signalisiert werden sollen, kann mit unterschiedlichen Vibrationsfrequenzen 55 oder mit einer Zuschaltung der Motoranzahl auf der Haut je Greifkraftintervall 56 57 58 gearbeitet werden. Sie können zur Leistungssteigerung bei Greifaufgaben sowohl bei Prothesenträgern 59 als auch bei gesunden Probanden 60 61 beitragen.
Elektrotaktile Systeme können z. B. mit zwei Oberflächenelektroden und Frequenzen zwischen 40 und 120 Hz den Ulnar- und den Mediannerv stimulieren 62. Dabei können je nach Stromstärke (2–13 mA) und Impulsdauer (1–10 μs) verschieden starke Druck- und Kribbelempfindungen ausgelöst werden, die ein Feedback über die Fingerbeugung bei Greifbewegungen übermitteln.
Kraftübertragende Stimulatoren erzeugen zumeist Hautdehnungen, indem sie z. B. die Stirnflächen zweier Pins mit vibrationsfreien Effektoren am Oberarm gegeneinander verdrehen (Scherkräfte) 63. Somit wird bei Probanden ein propriozeptives Feedback über die Armposition im Raum möglich. Ein umklammerndes Kraftrückkopplungssystem („Clenching Upperlimb Force Feedback“, CUFF) hingegen besteht aus einer um den Oberarm gelegten Manschette, die durch Gleichstrommotoren entweder enger gezogen (Radialkräfte) oder gegen die Hautoberfläche verdreht wird (Scherkräfte), wodurch Handöffnungsweite und Greifkräfte differenziert werden können 64.
Kopplung des Feedbacks
Die Art der abzubildenden Rückkopplung (mechano- oder propriozeptiv), die hieraus entstehende Vielfalt der messtechnisch für eine Kopplung nutzbaren Eingangsgrößen und der durchgehend erkennbare, experimentelle Charakter der bis dato vorgestellten Stimulatoren verdeutlicht die Unsicherheit darüber, wie eine möglichst brauchbare und sinnvolle „Übersetzung“ von Modalität A zu Modalität B überhaupt erfolgen soll. Das mag auch der Grund dafür sein, dass nur in den seltensten Fällen über das eingesetzte Kopplungssystem berichtet wird. So konnte z. B. für die Hautdehnung per Torsion festgestellt werden, dass eine propriozeptive Rückkopplung mit einer linearen Übertragung des Differenzsignals aus dem Bizeps- und dem Trizeps-sEMG des Oberarmes nicht zufriedenstellend funktionierte 65. Erst eine polynome Übertragungsfunktion führte zum prinzipiellen Gelingen, wenngleich auf eine mögliche Leistungsverbesserung durch ein sensorisches Mapping hingewiesen wird 66. Das erstaunt insofern, als dass ein Mapping schon seit Langem als obligat vorausgesetzt wird, weil lineare Übertragungsfunktionen sich oftmals als ineffektiv herausstellen 67 und wodurch sich die Erforderlichkeit von Kopplungssystemen eigentlich schon von selbst erklärt.
Robotik
Auf dem wissenschaftlichen Gebiet der Robotik beschäftigt man sich schon seit Jahrzehnten mit der Erzeugung handähnlicher Manipulatoren und dem höchst anspruchsvollen Problem des Greifens und Manipulierens von Gegenständen. Bereits jetzt besitzen Roboter für die Manipulation verschiedener, beliebig orientierter Objekte die Fähigkeit die Positionierung des Manipulators sowie die passende Greifkonfiguration autonom auszuwählen und umzusetzen 68 69.
Intelligentes Greifen durch Robotik?
Bei diesen Aufgaben werden Roboter zunehmend von innovativen Methoden wie maschinellem Sehen und Lernen unterstützt. Somit können sie unter Verwendung von Kamerasystemen und Bildverarbeitungsalgorithmen selbst nur zum Teil sichtbare, bewegte oder unbekannte Objekte greifen 70 71 72. Optimierungsmethoden künstlicher neuronaler Netzwerke wie etwa „Deep Learning“ ermöglichen inzwischen sogar kollektiv arbeitenden Robotern ohne jegliches Vorwissen die Aneignung selbstständiger Greifstrategien 73 74. Vergleicht man derart intelligente Systeme mit den aktuell auf dem Markt befindlichen Handprothesen, so erscheinen Letztere mehr als rückständig. Die Gründe dafür liegen in einer enorm verzögerten Überführung der State-of-the-Art-Technik aus der Wissenschaft in die alltägliche, medizintechnische Anwendung. Als hauptsächliche Hinderungsgründe sind dabei die kostenaufwendige Herstellung komplexer Robotersysteme – aufgrund der hohen Zahl technischer Einzelkomponenten und insbesondere wegen sicherheitstechnischer Aspekte – anzusehen. Letzteres wird derzeit dadurch gelöst, dass Roboter zunehmend leichter und flexibler gestaltet (Softrobotik) und mit sicherheitsrelevanten Regelungsalgorithmen ausgestattet werden 75, um sie nicht nur mit Blick auf die Prothetik für die Interaktion mit dem Menschen zukunftsfähig zu machen.
Einzug der Robotik in die Handprothetik
Im Gegensatz zu den aktuell am Markt verfügbaren, anthropometrischen und multiartikulierenden Händen stellt der nächste Entwicklungsschritt – ein anthropometrisches und zugleich minimales Design – eine nicht zu verachtende Herausforderung dar. Denn dazu ist ein tiefes Verständnis der menschlichen Greif- und Manipulationskontrolle erforderlich. Nach ersten Versuchen mit minimalistischen Grundkonzepten – worunter die Erzielung einer hohen anforderungsspezifischen Funktionalität bei gleichzeitig einfach gehaltenem, mechanischem Aufbau zu verstehen ist – hat man sich mit der Zeit wieder mehr in Richtung eines anthropometrischen Designs bewegt 76. Dabei wird die menschliche Hand gestaltlich so genau wie möglich nachgebildet. Die Schwierigkeiten anthropometrischer Roboterhände sind jedoch technischer Natur und treten oftmals bezüglich der Genauigkeit, der Dimensionierung von Sensorik und Motorik sowie der Leistungs- und Signalübertragung in Erscheinung. Ein minimalistischer Ansatz dagegen löst viele dieser Probleme bereits mit den sogenannten „Underactuated Hands“, deren Hauptmerkmal die Kontrolle mehrerer Freiheitsgrade durch eine Minimalzahl von Motoren ist 77. Dieses Konzept führt zugleich zu einer signifikanten Vereinfachung der Steuerungsalgorithmen, was mit Blick in die Vergangenheit einen beachtlichen Entwicklungsschub darstellt. Wird dieser Ansatz mit den zuletzt aufwendig erforschten posturalen Synergien des menschlichen Greifens kombiniert 78, so ergibt sich durch die direkte mechanische Implementierung der Greifintelligenz in die Handprothese eine weitere Dimensionsreduzierung. Dieses Prinzip wird durch ausgeklügelte, mechanische Systeme aus Seilzügen, Umlenkrollen und Differenzialgetrieben bereits umgesetzt 79. Der Vorteil solcher Prothesenhände besteht in der Fähigkeit zu Grob- und Feinmanipulationen, in einer hohen Flexibilität der Fingerglieder und in der Anpassung der Fingerglieder an die Oberfläche des zu greifenden Objekts 80. So benötigt z. B. die Roboterhand des Massachusetts Institute of Technology (Boston, USA) lediglich zwei Gleichstrommotoren, um 17 Freiheitsgrade anzutreiben 81. Eine weitere Entwicklung dieses Konzepts wird aktuell mit der Roboterhand „Pisa/IIT SoftHand Pro“ (Centro E. Piaggio, Universität Pisa, Italien) verfolgt (Abb. 4), die mit nur einem Motor 19 Freiheitsgrade beeinflussen kann 82. Sie kann deshalb auf der Basis nur einer adaptiven Synergie kontrolliert werden, wodurch sie sich trotz ihrer enormen „Fingerfertigkeit“ intuitiv nur durch zwei direkte, myoelektrische Steuersignale kontrollieren lässt. Eine erweiterte Version mit einem zweiten Motor kann zeitgleich zum ersten Motor eine weitere Synergie berücksichtigen, wodurch zusätzliche Greifmöglichkeiten und Handgelenkstellungen ausgeführt werden können. Beide Synergien erfordern jedoch wiederum eine simultane Steuerung 83.
Fazit
Auch wenn die Lücke zwischen Forschungsergebnissen und kommerziell erhältlichen Produkten im Bereich der Hand- und Armprothetik in den letzten Jahren aus technischen und zulassungsrelevanten Gründen immer größer geworden zu sein scheint, stehen aktuelle Begrifflichkeiten wie die „gedankengesteuerte Prothese“ dennoch in ihrer Entwicklung zumindest teilweise vor einem Durchbruch. Diese Prognose lässt sich damit belegen, dass derzeitige Bemühungen sich vornehmlich auf eine möglichst intuitive, simultane und reproduzierbare Signalgebung für die Prothesensteuerung konzentrieren. Mit den vorgestellten Mustererkennungsalgorithmen sind hohe Klassifizierungsgenauigkeiten für verschiedene Greifarten – wenn auch zur Zeit noch unter Laborbedingungen – erreichbar. Demgegenüber ist es besonders interessant zu beobachten, dass mittels mechanischer Implementierung von Kontrollinstanzen in die Prothese versucht wird der Problematik einer komplexen Prothesensteuerung mit großen Schritten entgegenzukommen 84 85. Ein zusätzlicher Entwicklungsschub ist zukünftig auch von den immer mehr zutage tretenden Überschneidungen zwischen Robotik und Prothetik zu erwarten. Der Einzug der Maschinenintelligenz in die Prothetik der oberen Extremität scheint gleichsam nur noch eine Frage der Zeit zu sein.
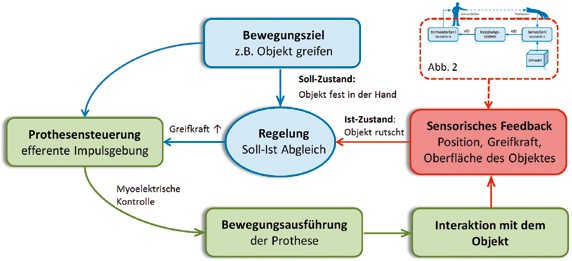
Für eine darüber hinausgehende Verbesserung der intuitiven Prothesensteuerung wird man nicht umhinkönnen zukünftig Feedbacksysteme in Prothesen zu integrieren, womit dem Patienten dann wieder eine geschlossene Rückkopplungsschleife zur Verfügung steht (Abb. 5). Aktuelle Feedbacksysteme basieren allerdings stets auf der sensorischen Substitution und sind somit weit von einer wirklichkeitsnahen Rückkopplungskontrolle entfernt. Jeder Gedanke an eine technische Nachahmung des somatosensorischen Systems der Hand – und sei es auch nur in Teilen – ist aufgrund ihrer für diesen Zweck weitestgehend unerforschten Physiologie als vollkommen abwegig zu betrachten. Zudem wird der bei der Substitution notwendigen Kopplung zwischen Sensorik und Stimulation bis heute zu wenig Beachtung geschenkt, sodass auch hier weit mehr als der heutige Entwicklungsstand notwendig wäre, um von „fühlenden Prothesenhänden“ sprechen zu können.
Für die Autoren:
Dr. sc. hum. Dipl.-Ing (FH) Eike Jakubowitz
Labor für Biomechanik und Biomaterialien
Orthopädische Klinik der Medizinischen
Hochschule Hannover
Anna-von-Borries-Straße 1–7
30625 Hannover
Jakubowitz.Eike@mh-hannover.de
Begutachteter Beitrag/reviewed paper
Jakubowitz E, Kettenbach A, Fleischer-Lück B. Aktuelle Entwicklungen in der Handprothetik – wie nah sind wir wirklich an Sensibilität und Intelligenz? Orthopädie Technik, 2018; 69 (7): 30–38


- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Lake C. The Evolution of Upper Limb Prosthetic Socket Design. J Prosthet Orthot, 2008; 20 (3): 85–92
- Schlesinger G. Der mechanische Aufbau der künstlichen Glieder. In: Borchardt M, Hartmann K, Leymann, Radike R, Schlesinger G, Schwiening H (Hrsg.). Ersatzglieder und Arbeitshilfen für Kriegsbeschädigte und Unfallverletzte. Berlin, Heidelberg: Springer-Verlag, 1919: 321–661
- Alderson SW. The electric arm. In: Klopsteg PE, Wilson PD (eds). Human limbs and their substitutes. New York: McGrawHill, 1954: 359–410
- Wilson AB. Externally powered upper-limb prostheses. Prosthetic and Orthotic Clinic Newsletter, 1978; 2 (1): 1–4
- Finkelstein G. Mechanical neuroscience: Emil du BoisReymond’s innovations in theory and practice. Front Syst Neurosci, 2015; 30 (9): 133
- Wilson AB. Externally powered upper-limb prostheses. Prosthetic and Orthotic Clinic Newsletter, 1978; 2 (1): 1–4
- Ison M, Artemiadis P. The role of muscle synergies in myoelectric control: trends and challenges for simultaneous multifunction control. J Neural Eng, 2014; 11 (5): 051001
- Biddiss E, Chau TT. Upper limb prosthesis use and abandonment: a survey of the last 25 years. Prosthet Orthot Int, 2007; 31 (3): 236–257
- Resnik L, Huang H, Winslow A, Crouch DL, Zhang F, Wolk N. Evaluation of EMG pattern recognition for upper limb prosthesis control: a case study in comparison with direct myoelectric control. J Neuroeng Rehabil, 2018; 15 (1): 23
- Savescu A, Cheze L, Wang X, Beurier G, Verriest JP. A 25 degrees of freedom hand geometrical model for better hand attitude simulation. SAE Technical Paper, 2004: 2196
- Li S, He J, Sheng X, Liu H, Zhu X. Synergy-driven myoelectric control for EMG-based prosthetic manipulation: A case study. Int J Human Robot, 2014; 11 (2): 1450013–1–14
- Tresch MC, Saltiel P, d’Avella A, Bizzi E. Coordination and localization in spinal motor systems. Brain Res Brain Res Rev, 2002; 40 (1–3): 66–79
- Vujaklija I, Shalchyan V, Kamavuako N, Jiang N, Marateb HR, Farina D. Online mapping of EMG signals into kinematics by autoencoding. J Neuroeng Rehabil, 2018; 15 (1): 21–30
- Scheme E, Englehart K. Electromyogram pattern recognition for control of powered upper-limb prostheses: State of the art and challenges for clinical use. J Rehabil Res Dev, 2011; 48 (6): 643–659
- Resnik L, Huang H, Winslow A, Crouch DL, Zhang F, Wolk N. Evaluation of EMG pattern recognition for upper limb prosthesis control: a case study in comparison with direct myoelectric control. J Neuroeng Rehabil, 2018; 15 (1): 23
- Ison M, Artemiadis P. The role of muscle synergies in myoelectric control: trends and challenges for simultaneous multifunction control. J Neural Eng, 2014; 11 (5): 051001
- Ciancio AL, Cordella F, Barone R, Romeo RA, Bellingegni AD, Sacchetti R, Davalli A, Di Pino G, Ranieri F, Di Lazzaro V, Guglielmelli E, Zollo L. Control of prosthetic hands via the peripheral nervous system. Front Neurosci, 2016; 10: 116
- Ison M, Artemiadis P. The role of muscle synergies in myoelectric control: trends and challenges for simultaneous multifunction control. J Neural Eng, 2014; 11 (5): 051001
- Scheme E, Englehart K. Electromyogram pattern recognition for control of powered upper-limb prostheses: State of the art and challenges for clinical use. J Rehabil Res Dev, 2011; 48 (6): 643–659
- Ciancio AL, Cordella F, Barone R, Romeo RA, Bellingegni AD, Sacchetti R, Davalli A, Di Pino G, Ranieri F, Di Lazzaro V, Guglielmelli E, Zollo L. Control of prosthetic hands via the peripheral nervous system. Front Neurosci, 2016; 10: 116
- Coapt, LLC (Chicago, Illinois, USA). Coapt Complete Control. https://www.coaptengineering.com (Zugriff am 20.04.2018)
- Kuiken TA, Barlow AK, Hargrove L, Dumanian GA. Targeted muscle reinnervation for the upper and lower extremity. Tech Orthop, 2017; 32 (2): 109–116
- Hargrove LJ, Miller LA, Turner K, Kuiken TA. Myoelectric pattern recognition outperforms direct control for transhumeral amputees with targeted muscle reinnervation: A randomized clinical trial. Scientific Reports, 2017; 7 (1): 13840
- Jiang N, Muceli S, Graimann B, Farina D. Effect of arm position on the prediction of kinematics from EMG in amputees. Med Biol Eng Comput, 2013; 51 (1–2): 143–151
- Krasoulis A, Kyranou I, Erden MS, Nazarpour K, Vijayakumar S. Improved prosthetic hand control with concurrent use of myoelectric and inertial measurements. J Neuroeng Rehabil, 2017; 14 (1): 71
- Li X, Samuel OW, Zhang X, Wang H, Fang P, Li, G. A motion-classification strategy based on sEMG-EEG signal combination for upper-limb amputees. J Neuroeng Rehabil, 2017; 14 (1): 2
- Leo A, Handjaras G, Bianchi M, Marino H, Gabiccini M, Guidi A, Scilingo EP, Pietrini P, Bicchi A, Santello M, Ricciardi E. A synergy-based hand control is encoded in human motor cortical areas. eLlife, 2016; 5: e13420 22.
- Sikdar S, Rangwala H, Eastlake EB, Hunt IA, Nelson AJ, Devanathan J, Shin A, Pancrazio JJ. Novel method for predicting individual finger movements by imaging muscle activity using a wearable ultrasonic system. IEEE Trans Neural Syst Rehabil Eng, 2014; 22 (1): 69–76
- Ortenzi V, Tarantino S, Castellini C, Cipriani, C. Ultrasound imaging for hand prosthesis control: A comparative study of features and classification methods. IEEE International Conference Rehabilitation Robotics (ICORR), 2015: 1–6
- DeGol J, Akhtar A, Manja B, Bretl T. Automatic grasp selection using a camera in a hand prosthesis. Conf Proc IEEE Eng Med Biol Soc, 2016: 431–434
- Zhao H, O’Brien K, Li S, Shepherd RF. Optoelectronically innervated soft prosthetic hand via stretchable optical waveguides. Sci Robot, 2016; 1: eaai7529
- DeGol J, Akhtar A, Manja B, Bretl T. Automatic grasp selection using a camera in a hand prosthesis. Conf Proc IEEE Eng Med Biol Soc, 2016: 431–434
- Pasquina PF, Evangelista M, Carvalho AJ, Lockhart J, Griffin S, Nanos G, McKay P, Hansen M, Ipsen D, Vandersea J, Butkus J, Miller M, Murphy I, Hankin D. First in-man demonstration of a fully implanted myoelectric sensors system to control an advanced electromechanical prosthetic hand. J Neurosci Methods, 2015; 244: 85–93
- Hahne JM, Farina D, Jiang N, Liebetanz D. A novel percutaneous electrode implant for improving robustness in advanced myoelectric control. Front Neurosci, 2016; 10: 114
- Rossini PM, Micera S, Benvenuto A, Carpaneto J, Cavallo G, Citi L, Cipriani C, Denaro L, Denaro V, Di Pino G, Ferreri F, Guglielmelli E, Hoffmann KP, Raspopovic S, Rigosa J, Rossini L, Tombini M, Dario P. Double nerve intraneural interface implant on a human amputee for robotic hand control. Clin Neurophysiol, 2010; 121 (5): 777–783
- Hochberg LR, Bacher D, Jarosiewicz B, Masse NY, Simeral JD, Vogel J, Haddadin S, Liu J, Cash SS, van der Smagt P, Donoghue JP. Reach and grasp by people with tetraplegia using a neutrally controlled robotic arm. Nature, 2012; 485 (7398): 372–375
- Fifer MS, Acharya S, Benz HL, Mollazadeh M, Crone NE, Thakor NV. Toward electrocorticographic control of a dexterous upper limb prosthesis: building brain-machine interfaces. IEEE Pulse, 2012; 3 (1): 38–42
- McGlone F, Wessberg J, Olausson H. Discriminative and affective touch: sensing and feeling. Neuron, 2014; 82 (4): 737–755
- Johnson KO. The roles and functions of cutaneous mechanoreceptors. Curr Opin Neurobiol, 2001; 11 (4): 455–461
- Tee BC, Chortos A, Berndt A, Nguyen AK, Tom A, McGuire A, Lin ZC, Tien K, Bae WG, Wang H, Mei P, Chou HH, Cui B, Deisseroth K, Ng TN, Bao Z. A skin-inspired organic digital mechanoreceptor. Science, 2015; 350 (6258): 313–316
- Yau JM, Kim SS, Thakur PH, Bensmaia SJ. Feeling form: the neural basis of haptic shape perception. J Neurophysiol, 2016; 115 (2): 631–642
- Visell Y. Tactile sensory substitution: models for enaction in HCI. Interact Comput, 2009; 21 (1–2): 38–53
- Battaglia E, Bianchi M, Altobelli A, Grioli G, Catalano M, Serio A, Santello M, Bicchi A. ThimbleSense: a fingertipwearable tactile sensor for grasp analysis. IEEE Trans Haptics, 2016; 9 (1): 121–133
- Zhao H, O’Brien K, Li S, Shepherd RF. Optoelectronically innervated soft prosthetic hand via stretchable optical waveguides. Sci Robot, 2016; 1: eaai7529
- Catalano MG, Grioli G, Farnioli E, Serio A, Piazza C, Bicchi A. Adaptive synergies for the design and control of the Pisa/IIT SoftHand. Int J Robotics Res, 2014; 33 (5): 768–782
- Godfrey S, Bianchi M, Bicchi A, Santello M. Influence of force feedback on grasp force modulation in prosthetic applications: A preliminary study. Conf Proc IEEE Eng Med Biol Soc, 2016: 5439–5442
- Visell Y. Tactile sensory substitution: models for enaction in HCI. Interact Comput, 2009; 21 (1–2): 38–53
- Witteveen HJ, Rietman HS, Veltink PH. Vibrotactile grasping force and hand aperture feedback for myoelectric forearm prosthesis users. Prosthet Orthot Int, 2015; 39 (3): 204–212
- Witteveen HJ, Rietman HS, Veltink PH. Vibrotactile grasping force and hand aperture feedback for myoelectric forearm prosthesis users. Prosthet Orthot Int, 2015; 39 (3): 204–212
- Witteveen HJ, de Rond L, Rietman JS, Veltink PH. Handopening feedback for myoelectric forearm prostheses: Performance in virtual grasping tasks influenced by different levels of distraction. J Rehabil Res Dev, 2012; 49 (10): 1517–1526
- Raveh E, Portnoy S, Friedman J. Adding vibrotactile feedback to a myoelectric-controlled hand improves performance when online visual feedback is disturbed. Hum Mov Sci, 2018; 58: 32–40
- Witteveen HJ, Rietman HS, Veltink PH. Vibrotactile grasping force and hand aperture feedback for myoelectric forearm prosthesis users. Prosthet Orthot Int, 2015; 39 (3): 204–212
- Witteveen HJ, de Rond L, Rietman JS, Veltink PH. Handopening feedback for myoelectric forearm prostheses: Performance in virtual grasping tasks influenced by different levels of distraction. J Rehabil Res Dev, 2012; 49 (10): 1517–1526
- Raveh E, Portnoy S, Friedman J. Adding vibrotactile feedback to a myoelectric-controlled hand improves performance when online visual feedback is disturbed. Hum Mov Sci, 2018; 58: 32–40
- Witteveen HJ, Rietman HS, Veltink PH. Vibrotactile grasping force and hand aperture feedback for myoelectric forearm prosthesis users. Prosthet Orthot Int, 2015; 39 (3): 204–212
- Witteveen HJ, Rietman HS, Veltink PH. Vibrotactile grasping force and hand aperture feedback for myoelectric forearm prosthesis users. Prosthet Orthot Int, 2015; 39 (3): 204–212
- Witteveen HJ, de Rond L, Rietman JS, Veltink PH. Handopening feedback for myoelectric forearm prostheses: Performance in virtual grasping tasks influenced by different levels of distraction. J Rehabil Res Dev, 2012; 49 (10): 1517–1526
- Raveh E, Portnoy S, Friedman J. Adding vibrotactile feedback to a myoelectric-controlled hand improves performance when online visual feedback is disturbed. Hum Mov Sci, 2018; 58: 32–40
- Witteveen HJ, Rietman HS, Veltink PH. Vibrotactile grasping force and hand aperture feedback for myoelectric forearm prosthesis users. Prosthet Orthot Int, 2015; 39 (3): 204–212
- Witteveen HJ, de Rond L, Rietman JS, Veltink PH. Handopening feedback for myoelectric forearm prostheses: Performance in virtual grasping tasks influenced by different levels of distraction. J Rehabil Res Dev, 2012; 49 (10): 1517–1526
- Raveh E, Portnoy S, Friedman J. Adding vibrotactile feedback to a myoelectric-controlled hand improves performance when online visual feedback is disturbed. Hum Mov Sci, 2018; 58: 32–40
- Germany EI, Pino EJ, Aqueveque PE. Myoelectric intuitive control and transcutaneous electrical stimulation of the forearm for vibrotactile sensation feedback applied to a 3D printed prosthetic hand. Conf Proc IEEE Eng Med Biol Soc, 2016: 5046–5050
- Wheeler J, Bark K, Savall J, Cutkosky M. Investigation of rotational skin stretch for proprioceptive feedback with application to myoelectric systems. IEEE Trans Neural Syst Rehabil Eng, 2010; 18 (1): 58–66
- Godfrey S, Bianchi M, Bicchi A, Santello M. Influence of force feedback on grasp force modulation in prosthetic applications: A preliminary study. Conf Proc IEEE Eng Med Biol Soc, 2016: 5439–5442
- Wheeler J, Bark K, Savall J, Cutkosky M. Investigation of rotational skin stretch for proprioceptive feedback with application to myoelectric systems. IEEE Trans Neural Syst Rehabil Eng, 2010; 18 (1): 58–66
- Wheeler J, Bark K, Savall J, Cutkosky M. Investigation of rotational skin stretch for proprioceptive feedback with application to myoelectric systems. IEEE Trans Neural Syst Rehabil Eng, 2010; 18 (1): 58–66
- Visell Y. Tactile sensory substitution: models for enaction in HCI. Interact Comput, 2009; 21 (1–2): 38–53
- Espiau B, Chaumette F and Rives P. A new approach to visual servoing in robotics. IEEE Transactions on Robotics and Automation, 1992; 8 (3): 313–326
- León B, Morales A, Sancho-Bru J. Robot grasping foundations. In: León B, Morales A, Sancho-Bru J (eds). From robot to human grasping simulation. Cham: Springer-Verlag, 2014: 15–31
- Bohg J, Johnson-Roberson M, Leon B, Felip J,Gratal X, Bergstrom N, Kragic D, Morales A. Mind the gap – robotic grasping under incomplete observation. 2011 IEEE International Conference on Robotics and Automation, 2011: 686–693
- Namiki A, Imai Y, Ishikawa M, Kaneko M. Development of a high-speed multifingered hand system and its application to catching. Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2003; 3: 2666–2671
- Saxena A, Driemeyer J, Ng AY. Robotic grasping of novel objects using vision. Int J Robotics Res, 2008; 27 (2): 157–173
- Pinto L, Gupta A. Supersizing self-supervision: Learning to grasp from 50K tries and 700 robot hours. IEEE International Conference on Robotics and Automation, 2016: 3406–3413
- Levine S, Pastor P, Krizhevsky A, Ibarz J, Quillen D. Learning hand-eye coordination for robotic grasping with deep learning and large-scale data collection. Int J Robotics Res, 2017: arXiv:1603.02199
- Haddadin S, Haddadin S, Khoury A, Rokahr T, Parusel S, Burgkart R, Bicchi A, Albu-Schäffer A. On making robots understand safety: Embedding injury knowledge into control. Int J Robotics Res, 2012; 31 (13): 1578–1602
- Bicchi A. Hands for dexterous manipulation and robust grasping: A difficult road towards simplicity. IEEE Transactions on Robotics and Automation, 2000; 16 (6): 652–662
- Birglen L, Gosselin C, Laliberté T. Underactuated Robotic Hands. Machine Intelligence & Robotic Control, 2002: 4 (3): 1–11
- Ciocarlie M, Goldfeder C, Allen P. Dexterous grasping via eigengrasps: A low-dimensional approach to a high-complexity problem. Proceedings of the robotics: science and systems 2007 manipulating workshop – Sensing and adapting to the real world, 2007: 3270–3275
- Catalano MG, Grioli G, Farnioli E, Serio A, Piazza C, Bicchi A. Adaptive synergies for the design and control of the Pisa/IIT SoftHand. Int J Robotics Res, 2014; 33 (5): 768–782
- Bicchi A, Gabiccini M, Santello M. Modelling natural and artificial hands with synergies. Philos Trans R Soc Lond B Biol Sci, 2011; 366 (1581): 3153–3161
- Brown CY, Asada HH. Inter-finger coordination and postural synergies in robot hands via mechanical implementation of principal components analysis. Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2007: 2877–2882
- Catalano MG, Grioli G, Farnioli E, Serio A, Piazza C, Bicchi A. Adaptive synergies for the design and control of the Pisa/IIT SoftHand. Int J Robotics Res, 2014; 33 (5): 768–782
- Rossi M, Della Santina C, Piazza C, Grioli G, Catalano M, Bicchi A. Preliminary results toward a naturally controlled multdone_Breieri-synergistic prosthetic hand. IEEE Int Conf Rehabil Robot, 2017: 1356–1363
- Catalano MG, Grioli G, Farnioli E, Serio A, Piazza C, Bicchi A. Adaptive synergies for the design and control of the Pisa/IIT SoftHand. Int J Robotics Res, 2014; 33 (5): 768–782
- Rossi M, Della Santina C, Piazza C, Grioli G, Catalano M, Bicchi A. Preliminary results toward a naturally controlled multi-synergistic prosthetic hand. IEEE Int Conf Rehabil Robot, 2017: 1356–1363
