Einleitung
Der menschliche Wadenmuskel erzeugt nahezu 80 % der zum Gehen erforderlichen mechanischen Arbeit 12 . Das Modell „Empower“ (eine Weiterentwicklung des Modells „BiOM T2“) ist der erste und einzige kommerziell erhältliche Prothesenfuß mit aktivem Antrieb, der die Funktion des menschlichen Wadenmuskels nachahmt und beim Gehen mehr Energie an den Amputierten abgibt, als er aufnimmt 3. Eine Vielzahl von Studien belegt, dass dies zu einer deutlichen Erhöhung der selbstgewählten Geh geschwindigkeit, einer Verringerung des Energieverbrauchs, einer geringeren Belastung des Bewegungsapparates sowie einer Verbesserung der Biomechanik des gesamten Körpers beim Gehen führt 456. Des Weiteren werden neben ebenem Gehen auch das Treppensteigen und das Heraufgehen von Schrägen zum Vorteil des Anwenders aktiv unterstützt 7.
Technologie
Die effektive Nachahmung verlorengegangener Wadenmuskelfunktionalität wird maßgeblich durch drei technologisch neuartige Funktionen ermöglicht: Zum einen bietet der Empower eine aktive Plantarflexion am Ende der Standphase zur Unterstützung des Zehenabstoßes. Des Weiteren wird kontinuierlich die Fersensteifigkeit nach Initialkontakt geregelt, was zu einer Reduzierung der Stoßbelastung beiträgt und auch die mögliche Gehgeschwindigkeitsänderung optimal unterstützt. Schließlich können Energiezufuhr und Widerstände per Einstellsoftware individuell auf den Anwender feinjustiert werden, um dessen Gangbild weiter dem physiologischen Vorbild anzunähern.
Die Steuerung des in Abbildung 1 dargestellten Knöchelgelenks wird durch drei Mikroprozessoren, sechs Sensoren und eine biomimetische Steuerungsfirmware realisiert. Das System ist in der Lage, Fersenwiderstand, Federspannung sowie das Antriebsmoment 500 Mal pro Sekunde anzupassen. Ähnlich der Kontrolle von Muskelsehnen und neuralen Reflexen beim menschlichen Knöchelgelenk arbeitet der Empower mit einem positiven Moment-Feedback. Eine Erhöhung des erfassten Moments im prothetischen Knöchelgelenk führt direkt zu einer Steigerung des vom Antrieb erzeugten Drehmoments für die aktive Plantarflexion. Dadurch wird eine automatische Anpassung der Energiezufuhr bei wechselnden Gehgeschwindigkeiten und Neigungen des Untergrunds erreicht: Je mehr der Empower belastet wird, desto stärker ist auch die direkte Antwort bzw. die aktive Plantarflexion im selben Schritt.
Über dieses grundlegende Wirkprinzip hinaus kann der Empower über die Einstellsoftware weiter an den individuellen Anwender angepasst werden. Im Einstellprozess erfassen die eingebauten Sensoren ausgewählte Parameter in der Schrittabwicklung. Diese werden in der Software visualisiert und können direkt mit physiologischen Referenzdaten verglichen und auch angepasst werden. Somit entspricht bei ordnungsgemäßer Einstellung die Schrittabwicklung im Prothesenfuß der dynamischen Nachbildung eines physiologischen Fußes über das gesamte Gehgeschwindigkeitsspektrum 89.
Übersicht über veröffentlichte Studienergebnisse
Gehgeschwindigkeit
Bei Verwendung konventioneller Prothesen, die keine aktive Plantarflexion bieten, ist die selbstgewählte Gehgeschwindigkeit von Amputierten um 11 bis 40 % langsamer als bei Menschen mit intakten Gliedmaßen 10. Esposito 11 hat ebenso wie Grabowski und D’Andrea 12 aufgezeigt, dass bei Verwendung eines aktiv angetriebenen Fußpassteils die gemessene maximale Knöchelleistung über einen weiten Geschwindigkeitsbereich von 0,75 m/s bis 1,75 m/s der von Nichtamputierten entspricht und dass die Energierückgabe im Vergleich zu konventionellen Prothesen erheblich höher ist (p < 0,05).
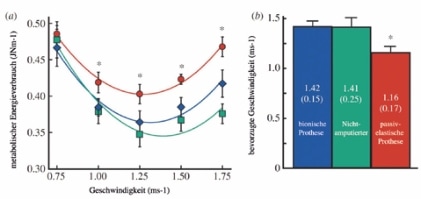
Herr und Grabowski 13 haben gezeigt, dass unterschenkelamputierte Anwender eine selbstgewählte Gehgeschwindigkeit von durchschnittlich 1,4 m/s mit dem aktiv angetriebenen Knöchelgelenk erreichen, die jener von Nichtamputierten entspricht (p = 0,97) und um durchschnittlich 23 % schneller ist als mit einer Prothese ohne Energiezufuhr (p = 0,008). Auch in der Studie von Gates et al. 14 wurde die Fähigkeit des Prothesenfußes, die selbstgewählte Gehgeschwindigkeit zu erhöhen, beim Gehen auf unebenem Untergrund unter Beweis gestellt. Die selbstgewählte Geh geschwindigkeit der Anwender in steinigem Gelände war mit dem aktiv angetriebenen Knöchelgelenk um 10 % schneller (1,16 m/s) als mit einer Prothese ohne Energiezufuhr (1,05 m/s, p = 0,031).
Energieverbrauch beim Gehen
Herr und Grabowski 15 haben, wie in Abbildung 2 dargestellt, gezeigt, dass der Energieverbrauch beim Gehen in einem Geschwindigkeitsbereich von 1,0 m/s bis 1,75 m/s bei Verwendung des aktiv angetriebenen Knöchelgelenks deutlich niedriger ist als bei Prothesen ohne Energiezufuhr (p < 0,05) und annähernd dem von Nichtamputierten entspricht (p > 0,5 bei 1,0–1,5 m/s; p = 0,17 bei 1,75 m/s). Auch in den Studien von Esposito et al. 16 und von Russell et al. 17 wird die Fähigkeit des Knöchelgelenks demonstriert, den Energiebedarf zu verringern. Anwender, die das aktiv angetriebene Knöchelgelenk verwenden, berichten von einem gesteigerten Aktivitätsniveau nach der Versorgung mit dem Prothesenfuß.
Belastung des Bewegungsapparates
Passive Prothesen können die physiologische Knöchelgelenkmechanik nur unzureichend energetisch nachbilden. Das führt zu erhöhten Gelenkbelastungen des gesunden Beins 18. Diese unnatürlichen Gelenkbelastungen sind potenziell für das vermehrte Auftreten von Osteoarthrose bei Amputierten verantwortlich. Beispielsweise liegt eine Gonarthrose 17 Mal häufiger bei Unterschenkelamputierten vor als bei gleichaltrigen Nichtamputierten 19.
Die Studien von Esposito et al. 20, Herr und Grabowski 21, Russell et al. 22 sowie Grabowski und D’Andrea 23 haben gezeigt, dass das aktiv angetriebene Knöchelgelenk beim Abstoßen des Prothesenbeins signifikant mehr Abstoßarbeit leistet als eine Prothese ohne Energiezufuhr (p < 0,006 im Geschwindigkeitsbereich von 0,75 m/s bis 1,75 m/s). Besondere Aufmerksamkeit gilt der Aussage von Grabowski und D’Andrea im Journal of Neuroengineering and Rehabilitation 24, wonach „die Verwendung eines Prothenfußes, der eine netto positive mechanische Arbeit leistet, unter Umständen das Risiko von Begleiterkrankungen wie Gonarthrose verringern kann“.
Sturzrisiko
Das Sturzrisiko wird vom Gesamtdrehimpuls des Körpers beeinflusst. Dieser wird beim Gehen sehr genau durch Muskelkräfte reguliert, um die Balance in der Bewegung zu gewährleisten. Eine Peer-Review-Studie hat gezeigt, dass der Prothesenfuß mit aktiver Energiezufuhr Drehimpulsschwankungen beim ebenen Gehen im bevorzugten Geschwindigkeitsbereich im Vergleich zu Prothesen ohne Energiezufuhr reduziert (p = 0,04), was auf ein verringertes Sturzrisiko bei Verwendung des Prothesenfußes mit aktiver Energiezufuhr hinweist 25.
Fazit
Es liegen zahlreiche klinische Nachweise vor, dass der Prothesenfuß „Empower“ den Amputierten der unteren Extremität eine aktive Energieunterstützung bietet, die mit der Unterstützung durch die Wadenmuskulatur beim Gehen von Nichtamputierten vergleichbar ist. Dadurch sind die Anwender in der Lage, mit variierenden Schrittfrequenzen und Gehgeschwindigkeiten auf dem Niveau von Nichtamputierten bei vergleichbarem Energieverbrauch zu gehen. Geht die gleiche Anwendergruppe mit passiven Prothesen ohne Energiezufuhr, reduziert sich die Gehgeschwindigkeit bei erhöhtem metabolischem Energieverbrauch. Weiterhin zeigen Studien, dass durch die unterstützende Energiezufuhr bzw. die Normalisierung der Knöchelmechanik Gangunregelmäßigkeiten gemindert werden, die ursächlich für Überlastungen der erhaltenen Seite sind – mit den bekannten möglichen Folgen (z. B. Osteoarthrose).
Der Autor:
Brian Frasure
BionX Medical Technologies Inc.
4 Crosby Drive
Bedford, Massachusetts 01730
USA
contact@bionxmed.com

- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Soo CH, Donelan JM. Mechanics and energetics of stepto-step transitions isolated from human walking. J Exp Biol, 2010; 213: 4265–4271
- Esposito ER, Aldridge Whitehead JM, Wilken JM. Stepto-step transition work during level and inclined walking using passive and powered ankle-foot prostheses. Prosthetics and Orthotics International, 2016; 40 (3): 311–319
- Herr HM, Grabowski AM. Bionic ankle–foot prosthesis normalizes walking gait for persons with leg amputation. Proc Biol Sci, 2011; 279 (1728): 457–464
- Esposito ER, Aldridge Whitehead JM, Wilken JM. Stepto-step transition work during level and inclined walking using passive and powered ankle-foot prostheses. Prosthetics and Orthotics International, 2016; 40 (3): 311–319
- Russell E, Aldridge J, Wilken J. Powered prostheses influence transition work during level and uphill walking in individuals with transtibial amputations. 60th Annual American College of Sports Medicine Meeting, Indianapolis, IN, May 28–June 1, 2013
- Gates DH et al. Kinematic comparison of walking on uneven ground using powered and unpowered prostheses. Clinical Biomechanics, 2013; 28 (4), 467–472
- Aldridge J, Sturdy J, Wilken J. Stair ascent kinematics and kinetics with a powered lower leg system following transtibial amputation. Gait & Posture, 2012; 36: 291–295
- Herr HM, Grabowski AM. Bionic ankle–foot prosthesis normalizes walking gait for persons with leg amputation. Proc Biol Sci, 2011; 279 (1728): 457–464
- Gates DH et al. Kinematic comparison of walking on uneven ground using powered and unpowered prostheses. Clinical Biomechanics, 2013; 28 (4), 467–472
- Hsu M, Nielsen D, Lin-Chan S, Shurr D. The Effects of Prosthetic Foot Design on Physiologic Measurements, SelfSelected Walking Velocity, and Physical Activity in People With Transtibial Amputation. Arch Phys Med Rehabil, 2006; 87: 123–129
- Esposito ER, Aldridge Whitehead JM, Wilken JM. Stepto-step transition work during level and inclined walking using passive and powered ankle-foot prostheses. Prosthetics and Orthotics International, 2016; 40 (3): 311–319
- Grabowski AM, D’Andrea S. Effects of a powered anklefoot prosthesis on kinetic loading of the unaffected leg during level-ground walking. Journal of Neuroengineering and Rehabilitation, 2013; 10: 49
- Herr HM, Grabowski AM. Bionic ankle–foot prosthesis normalizes walking gait for persons with leg amputation. Proc Biol Sci, 2011; 279 (1728): 457–464
- Gates DH et al. Kinematic comparison of walking on uneven ground using powered and unpowered prostheses. Clinical Biomechanics, 2013; 28 (4), 467–472
- Herr HM, Grabowski AM. Bionic ankle–foot prosthesis normalizes walking gait for persons with leg amputation. Proc Biol Sci, 2011; 279 (1728): 457–464
- Esposito ER, Aldridge Whitehead JM, Wilken JM. Stepto-step transition work during level and inclined walking using passive and powered ankle-foot prostheses. Prosthetics and Orthotics International, 2016; 40 (3): 311–319
- Russell E, Aldridge J, Wilken J. Powered prostheses influence transition work during level and uphill walking in individuals with transtibial amputations. 60th Annual American College of Sports Medicine Meeting, Indianapolis, IN, May 28–June 1, 2013
- Gailey R. Review of secondary physical conditions associated with lower-limb amputation and long-term prosthesis use. Journal of Rehabilitation Research & Development, 2008; 45 (1): 15–30
- Morgenroth D, Gellhorn GA, Suri P. Osteoarthritis in the Disabled Population: A Mechanical Perspective. The American Academy of Physical Medicine and Rehabilitation, 2012; 4: S20–S27
- Esposito ER, Aldridge Whitehead JM, Wilken JM. Stepto-step transition work during level and inclined walking using passive and powered ankle-foot prostheses. Prosthetics and Orthotics International, 2016; 40 (3): 311–319
- Herr HM, Grabowski AM. Bionic ankle–foot prosthesis normalizes walking gait for persons with leg amputation. Proc Biol Sci, 2011; 279 (1728): 457–464
- Russell E, Aldridge J, Wilken J. Powered prostheses influence transition work during level and uphill walking in individuals with transtibial amputations. 60th Annual American College of Sports Medicine Meeting, Indianapolis, IN, May 28–June 1, 2013
- Grabowski AM, D’Andrea S. Effects of a powered anklefoot prosthesis on kinetic loading of the unaffected leg during level-ground walking. Journal of Neuroengineering and Rehabilitation, 2013; 10: 49
- Grabowski AM, D’Andrea S. Effects of a powered anklefoot prosthesis on kinetic loading of the unaffected leg during level-ground walking. Journal of Neuroengineering and Rehabilitation, 2013; 10: 49
- D’Andrea S, Wilhelm N, Silvermann AK, Grabowski AM. Does use of a powered ankle-foot prosthesis restore whole-body angular momentum during walking at different speeds? Clin Orthop Relat Res, 2014; 472: 3044–3054
