Einleitung
Digitale Fertigungsprozesse sind in der Technischen Orthopädie mittlerweile allgegenwärtig. Die Vorteile, die eine entsprechende Arbeitsweise mit sich bringen, sind vielfältig. Versorgungsergebnisse werden reproduzierbar, digitale Standardprozesse schaffen Sicherheit, Fehlerquellen im Fertigungsprozess können leichter vermieden werden und eine objektive Beurteilung der hergestellten Hilfsmittel ist im Nachhinein sehr einfach möglich1.
Unabhängig davon, wie weitreichend eine digitale Produktion in den Betrieben umgesetzt wird – am Anfang muss im Rahmen des Hilfsmittelbaus auch weiterhin ein Körpermodell erstellt werden. Hierfür sind im Allgemeinen zwei Vorgehensweisen etabliert:
1. Bibliotheksmodelle skalieren
Es besteht die Möglichkeit, ein entsprechend vorbereitetes Bibliotheksmodell des jeweiligen Körperteils zu nutzen, um dieses mit Hilfe individuell erfasster Körpermaße digital zu skalieren. Diese Methode eignet sich immer dann hervorragend, wenn bei der Modellierung des Körperabdrucks stark von der individuellen Kontur abgewichen wird und eine sogenannte Zweckform entsteht. Mögliche Anwendungsbereiche sind daher: Skoliose-Orthesen, einfache Lagerungsorthesen oder OKB-Schaftmodelle.
2. Körperkontur direkt mit Hilfe eines 3D-Scanners erfassen
Die genaueste Abformung gelingt immer dann, wenn das Körperteil direkt mit Hilfe eines 3D-Scanners erfasst werden kann. Fehlstellungen, knöcherne Prominenzen oder Narbeneinzüge werden auf diese Weise unverfälscht und eindeutig digital abgebildet. Kommt es bei der späteren Hilfsmittelversorgung auf einen einwandfreien und flächigen Formschluss zwischen Körper und Hilfsmittel an, ist eine direkte Körperabformung mit einem 3D-Scanner anzustreben.
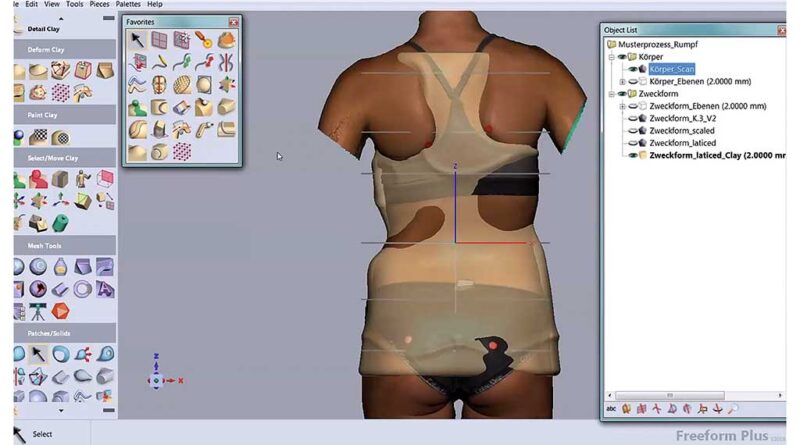
Die beiden Herangehensweisen lassen sich jedoch auch hervorragend verbinden. Sofern mit Bibliotheksmodellen gearbeitet wird, kann der skalierten Zweckform bei Bedarf ein 3D-Scan des Körpers überlagert werden. Auf diese Weise kann das Ergebnis der Skalierung zuverlässig überprüft werden und ggf. eine genauere Bearbeitung der Zweckform daraus hervorgehen. Werden die beiden überlagerten Modelle (skalierte Zweckform und 3D-Scan des Körpers) in Durchsicht dargestellt, kann darüber hinaus eine objektive Bewertung der Passform erfolgen. Be- und Entlastungsbereiche lassen sich sehr einfach überprüfen, bewerten und vermessen (Abb. 1).
Den Körper direkt mit Hilfe eines 3D-Scanners zu erfassen, kann jedoch vor allem im Bereich der Extremitäten eine echte Herausforderung darstellen. Das Herbeiführen von Stellungskorrekturen während des Abformens ist ohne äußere Einwirkung nicht möglich. Schnelle Bewegungen des Patienten können beim 3D-Scannen zu Bewegungsartefakten führen. Die digitalen Werkzeuge sowie die Handhabung des 3D-Verfahrens müssen verstanden und geübt werden.
Das Ermöglichen von Stellungskorrekturen bei der Abdruckname oder schlicht die Fixierung des Körpers in einer vordefinierten Stellung im Raum nimmt in diesem Zusammenhang sicherlich den höchsten Stellenwert ein. Bereits im 19. Jahrhundert machten sich findige Entwickler Gedanken, wie Körperfehlstellungen über mechanische Apparate ausgeglichen werden können2.
Die Erkenntnisse der Vergangenheit lassen sich nun perfekt auf die Herausforderungen der Gegenwart übertragen. Ein Schlüsselelement für die erfolgreiche Einführung digitaler Gesamtprozesse in Betrieben sind Körper-Positionierungshilfen, die eine 3D-Scanerstellung erleichtern oder erst ermöglichen.
Die Anwendung derartiger Werkzeuge wird bereits sehr erfolgreich in der Praxis umgesetzt. Beispiele für die Integration in den Versorgungsalltag sind das SimBrace®-Verfahren der Firma Pohlig GmbH3 oder das Arbeiten mit 3D-Scanwerkzeuge von TOplus (Häussler Technische Orthopädie GmbH) 4. Auch im Bereich Sitzschalenbau findet das Prinzip der Vorpositionierung des Patienten mit Hilfe eines Vacuumsacks und anschließendem 3D-Scan der abgeformten Kontur eine erfolgreiche Anwendung5.
Problemdefinition und Lösungswege mit 3D-Scanwerkzeugen
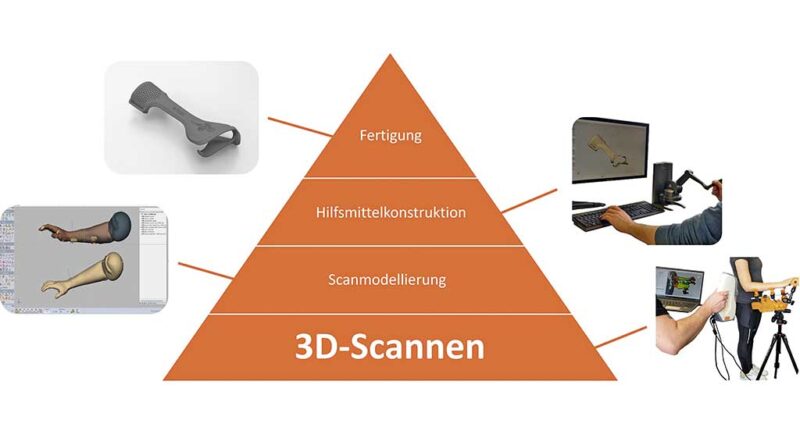
Eine erfolgreiche Umsetzung des digitalen Gesamtprozesses hängt essenziell von der Qualität und der Aufarbeitung des erstellen 3D-Körpermodells ab. Auch hinsichtlich einer standardisierten Arbeitsweise lassen sich nachgelagerte Fertigungsschritte wie das digitale Modellieren des Körperabdrucks oder das mögliche Konstruieren eines Hilfsmittels effizienter umsetzen, wenn bereits bei der 3D-Scanerstellung auf entsprechende Rahmenbedingungen geachtet wird.
Dem ersten Schritt in der digitalen Prozesskette (Abb. 2) gilt demnach ein besonderes Augenmerk. In diesem Zusammenhang lassen sich folgende Anforderungen festlegen, die ein 3D-Scanwerkzeug erfüllen sollte:
- Es sind Haltevorrichtungen vorhanden, die eine vorübergehende Ausrichtung, Platzierung oder Fixierung der Extremität im Raum ermöglichen. Ein modularer Aufbau des Scanwerkzeuges stellt sicher, dass der Anwender auf verschiedene Indikationen und individuelle Ansprüche bei der Körperpositionierung eingehen kann.
- Das 3D-Modell ist in vordefinierter Weise im digitalen Raum ausgerichtet, sodass ein Ebenenbezug z. B. zur Bodenebene erhalten bleibt (Targettracking).
- Das Scanwerkzeug ist im besten Falle transportabel, sodass der Einsatz im Außendienst möglich wird.
Vorstellung von 3D-Scanwerkzeugen und deren Anwendung
Folgend wird beschrieben, wie 3D-Scanwerkzeuge im Versorgungsalltag eingesetzt werden und welchen Mehrwert diese Werkzeuge für die digitale Hilfsmittelproduktion bringen.
3D-Scanwerkzeug „TOscan-UE“ für die obere Extremität6
Das Finden und Fixieren der für den Patienten bzw. für die Versorgung benötigten Körperstellung kann, wie in diesem Fall beschrieben, über flexible und feststellbare Gelenkarme erfolgen. Diese lassen sich in alle Raumrichtungen bewegen und feststellen. Durch die besondere Festigkeit der Gelenkarme kann leichten bis mittelschweren Spasmen zuverlässig entgegengewirkt werden.
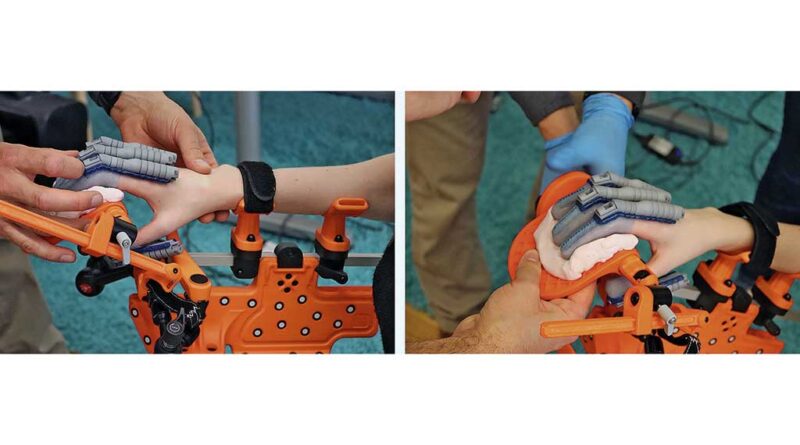
Über verschiedene Standardauflagen für die Finger lassen sich bereits beim Scannen die Anlageflächen des späteren Hilfsmittels definieren. Bei der Positionierung der Patientenhand empfiehlt es sich zudem, den Daumen über einen separaten Gelenkarm zu fassen und diesen gesondert nach den individuellen Patientenbedürfnissen zu fixieren. Sofern eine individuelle Bettung der Finger benötigt wird, bietet es sich an, mit Knetsilikon zu arbeiten (Abb. 3).
Besonderes Augenmerk bei der Fixierung des Patienten im Scanwerkzeug sollte stets auf den knöchernen Strukturen des Handgelenkes sowie der Fingergrundgelenke liegen. Diese Teilbereiche sollten durch das Scanwerkzeug nicht verdeckt werden.
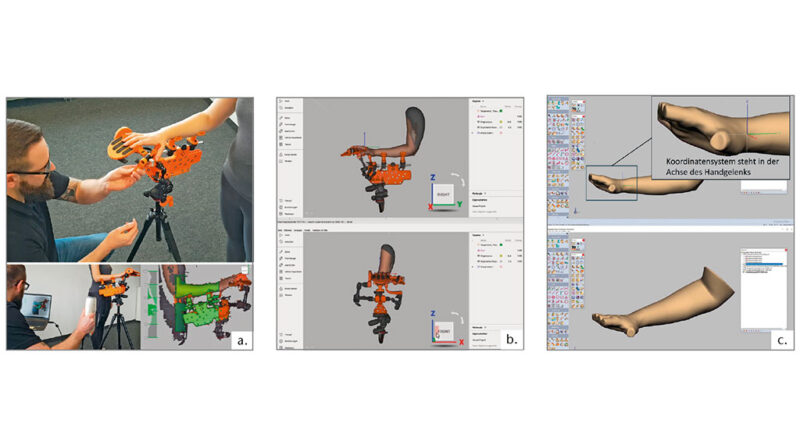
Ein 3D-Scanner orientiert sich hauptsächlich an der Geometrie des vorliegenden Objektes. Deshalb kann es gerade bei schmalen Körperformen zu Problemen beim 3D-Scannen kommen. Ist die zu erfassende Geometrie zu schmal, verliert der 3D-Scanner während des Scanvorgangs leichter seine Orientierung, was zu Abbrüchen oder Verschiebungen im 3D-Modell führen kann.
Abhilfe schafft die Verwendung von Referenzpunkten, sog. Targets/Marker, welche auf die Scanhilfe aufgebracht werden. Neben der Verbesserung des Trackings kann zusätzlich über das aufgebrachte Marker-Setup eine Trackingdatei erzeugt werden, die bereits im Vorfeld die Ausrichtung des Scans im Koordinatensystem der Scansoftware und dementsprechend auch im CAD-Arbeitsraum vordefiniert. Die nachträgliche digitale Positionierung des 3D-Scans zur anschließenden Scanmodellierung wird dadurch stark vereinfacht. Am Beispiel der oberen Extremität empfiehlt es sich, das Koordinatensystem in der Handgelenksachse zu positionieren (Abb. 4). Die Ausnutzung der Vorausrichtung des Scans im Koordinatensystem ist besonders dann vorteilhaft, wenn bei einer anschließenden Hilfsmittelkonstruktion mit Passteilbibliotheken gearbeitet wird. Hier lassen sich bspw. Gelenkpassteile direkt in der eindeutig definierten Handgelenksachse hinterlegen und können auf diese Weise leichter positioniert werden.
3D-Scanwerkzeug „TOscan-LE“ für die untere Extremität7
Die Funktionsweise und die Überlegungen für ein Scanwerkzeug der oberen Extremität lassen sich nahezu identisch auf ein Werkzeug zur Erfassung des Unterschenkels und des Fußes adaptieren.
Dementsprechend bietet sich auch hier die Verwendung eines Gelenkarmes an, um den Unterschenkel in die individuelle Patientenstellung zu bringen. Wegen der höheren Kräfte und Hebelverhältnisse, die bei der unteren Extremität wirken, sollte hier ein Gelenkarm vorzugsweise mit hydraulischer Klemmmechanik verwendet werden. Besteht aufgrund von Spasmen nicht die Möglichkeit, die Sprunggelenkstellung direkt beim 3D-Scan zu korrigieren, sollte in der für den Patienten maximal möglichen korrigierten Stellung gescannt werden. Die nachträgliche Finalisierung der Stellungskorrektur kann bei der angeschlossenen Scanmodellierung im CAD-/Modelliersystem (z. B. Geomagic Freeform) durchgeführt werden. Durch ein frontales und sagittales Laserlot kann bereits beim Ausrichten des Unterschenkels die korrekte Stellung überprüft werden.
Auch beim Scannen der unteren Extremität kann durch den Einsatz von Referenzpunkten das Tracking verbessert werden. Zusätzlich erleichtert das vordefinierte Koordinatensystem die Scanmodellierung im Nachgang. Unabhängig vom Aufbau des Scanwerkzeugs empfiehlt es sich vor allem für die Positionierung von Gelenkpassteilen und für die Erzeugung von Absatz und Spitzenhub bei der anschließenden Scanmodellierung, das Koordinatensystem im Sprunggelenk zu platzieren.
Grundsätzlich sind verschiedene Möglichkeiten zur Erfassung der unteren Extremität mittels 3D-Scanner nutzbar. Nachfolgend sind drei Möglichkeiten beschrieben, mit denen gute Ergebnisse erzielt werden können.
Scannen mit Glasplatte und Spiegel: Empfehlenswert, wenn der nackte Fuß samt Fußgewölbe digital erfasst werden soll. Durch die Nutzung eines Spiegels können in nur einem Scanvorgang sowohl der Unterschenkel als auch die Sohle gescannt und ein zusammenhängendes Volumenmodell erzeugt werden (Abb. 5).
Scannen mit Trittschaum: Zur Abformung der Sohle samt Fußgewölbe kann auch klassischer Trittschaum verwendet werden. Insgesamt müssen bei dieser Variante zwei 3D-Scans durchgeführt werden. Der erste Scan wird erstellt, während der Patient noch im Trittschaum steht. Für den zweiten Scan wird nur der Fußabdruck im Trittschaum digital erfasst. Die zwei Modelle werden anschließend bei der Scanaufbereitung voneinander abgezogen (Abb. 6).
Scannen mit vorbereiteter Fußbettung: Erfahrungsgemäß bietet es viele Vorteile, mit vorbereiteter Fußbettung zu arbeiten. Diese kann vor dem Scanprozess unter dem Fuß des Patienten positioniert und ggf. mit einem Strumpf fixiert werden. Anschließend wird das Patientenbein mit Hilfe des Scanwerkzeugs positioniert und ein 3D-Scan erstellt. Dadurch entfällt die separate Modellierung des Fußbetts bei der anschließenden Scanaufbereitung (z. B. mit der Software Freeform). Die Vorbereitete Fußbettung kann später in die Orthese eingeklebt werden. Eine weitere Möglichkeit besteht darin, die Fußbettung ihrerseits zu scannen und im Anschluss vom Körperscan abzuziehen. Auf diese Weise gelingt eine schnelle und zuverlässige Modellierung der Sohle (Abb. 7).
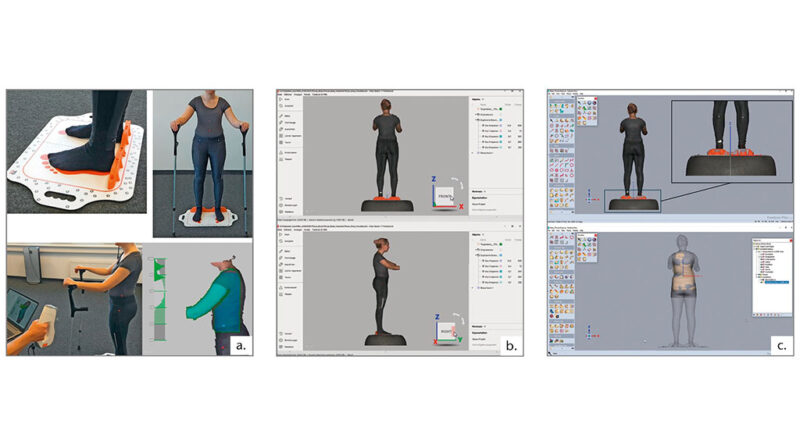
3D-Scanwerzeug „TOscan-Body“ für die Erstellung von Rumpfscans8
Im Besonderen bei Skoliosepatienten bietet es sich an, den Rumpf in bereits korrigierter Position mit einem 3D-Scanner zu erfassen. Ein entsprechendes System hat die Firma Pohlig GmbH mit ihrem SimBrace®-Verfahren bereits vorgestellt und erfolgreich in Anwendung9.
Eine weitere Möglichkeit besteht darin, den Körper bewusst in Fehlstellung zu erfassen und im Anschluss mit Bibliotheksmodellen zu arbeiten. Die Überlagerung der Bibliotheksform mit dem unkorrigierten Körperscan (bspw. in Freeform) ermöglicht die nachträgliche Interpretation der Zweckform in Durchsicht.
Ist der Rumpfscan bereits im Vorfeld durch ein definiertes Targetsetup und somit auch durch ein definiertes Koordinatensystem immer parallel zur Bodenebene ausgerichtet, lassen sich versorgungsrelevante Informationen wie bspw. die Rotation des Beckens oder Schulterschiefstände stets mit Bezug zur Bodenebene interpretieren. Dies ist im Vergleich zur konventionellen Abformung mittels Gipstechnik ein entscheidender Vorteil. Die Positionierung des Patienten auf dem Werkzeug kann durch die Verwendung eines Fersenanschlags erleichtert werden (Abb. 8). Um die Arme aus dem Scanbereich herauszuhalten, können Unterarmgehstützen verwendet werden.
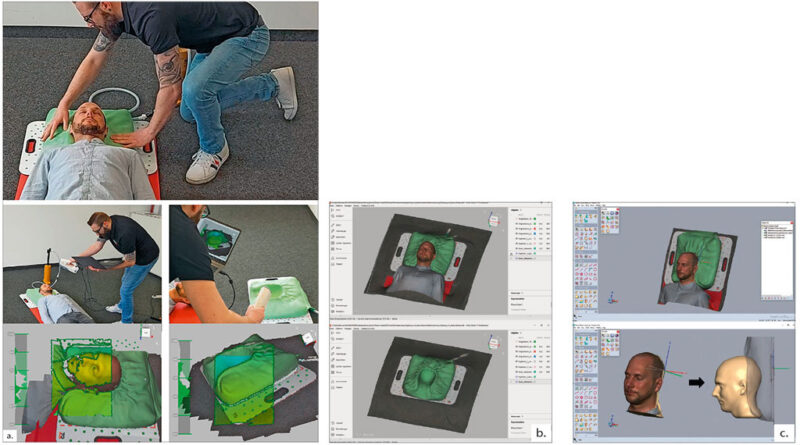
3D-Scanwerkzeug „TOscan-Head“ für die Erstellung von Kopfscans in schwierigem Umfeld10
Aufgrund des beengten Raums am Patientenbett und der begrenzten Verfügbarkeit von Hilfspersonen kann die Erstellung eines 3D-Kopfscans besonders im Bereich des intensivmedizinischen Klinikumfelds eine große Herausforderung darstellen. Beispielhaft für diesen Einsatzbereich besteht das hier gezeigte Scanwerkzeug aus einer Platte, die mit einem Targetsetup ausgerüstet ist. Über das Vakuumkissen wird der Kopf des Patienten gebettet und gleichzeitig der Hinterkopf abgeformt. Identisch wie bei der Nutzung von Trittschaum zur Abformung der Fußsohle werden auch bei der Kopfscanerstellung insgesamt zwei Scanvorgänge durchgeführt. Beim ersten Scan wird der Patientenkopf fixiert im Vakuumkissen erfasst. Für den zweiten Vorgang wird der Kopf des Patienten aus dem Vakuumkissen gehoben und nur das Kissen samt Platte gescannt. Durch die definierte Stellung der 3D-Scans im Raum, welche über das verwendete Targetsetup realisiert wird, ist auch bei diesem Vorgehen sichergestellt, dass beide 3D-Scans perfekt überlagern. In der anschließenden Scanmodellierung werden der Scan des Vakuumkissens digital vom Patientenscan entfernt und die entstehenden Ränder geglättet (Abb. 9).
Fazit
Das Arbeiten mit 3D-Scanwerkzeugen erleichtert die Erstellung von 3D-Scans entscheidend und stellt hinsichtlich der Umsetzbarkeit eines digitalen Gesamtprozesses ein Schlüsselelement dar. Die Möglichkeit, ein Körperteil indikationsspezifisch zu positionieren und direkt zu digitalisieren, mindert schnittstellenbedingte Fehlerpotentiale (Austausch zwischen Außendienst und Produktion) und ermöglicht eine unverfälschte Erfassung des Körperzustandes in der jeweiligen Stellung. Lässt sich das Körperteil aufgrund mittlerer bis starker Spasmen auch mit Scanwerkzeug nicht gänzlich in die gewünschte Stellung bringen, besteht immer die Möglichkeit einer nachträglichen, digitalen Stellungskorrektur z. B. mit der Software Geomagic Freeform.
Anzeichnungen an der Extremität (Entlastungsbereiche, Lot, Gelenklinien) werden zuverlässig in die digitale Welt übertragen. Auch dieser Umstand mindert Fehlerpotentiale und führt am Ende zu einem verlässlicheren Ergebnis des digitalen Körpermodells. Durch das konsequente Anwenden des Targettrackings gelingt eine Vorausrichtung des digitalen Modells im Raum. Aufgrund der bekannten Position des Datensatzes z. B. in der Software Freeform können nachfolgende Bearbeitungsschritte wie das Modellieren standardisiert und nachvollziehbar gestaltet werden. Diese Herangehensweise begünstigt außerdem die Möglichkeiten einer Automatisierung des standardisierten Vorgehens.
Durch das Erstellen von Einzelscans (Patient im Scanwerkzeug und Scanwerkzeug unverändert ohne Patient) in derselben Ausrichtung können Strukturen der Scanwerkzeuge, die Teile der Körperkontur verdecken, sehr leicht entfernt werden. Das digitale „Abziehen“ des Aufbaus vom Körperscan ist auch dann hilfreich, wenn Zusätze wie Fußbettungen, Pelotten-Setups, Trittschäume oder Vakuumkissen verwendet werden. Auf diese Weise gelingt eine schnelle und verlässliche Vormodellierung des Körperabdrucks.
Damit die Vorteile einer 3D-Scanerstellung mit Scanwerkzeug optimal zur Geltung kommen, sollten 3D-Scanner genutzt werden, die eine ausreichende Auflösung bieten, die Textur (Farbinformation) erfassen können und die Funktion Targettracking unterstützen. Das Arbeiten mit einem leistungsstarken, offenen Modelliersystem wie Freeform ermöglicht dem Anwender eine permanente Weiterentwicklung seiner Fähigkeiten, bis hin zu einer nahezu unbegrenzten Hilfsmittelkonstruktion.
Damit die Einarbeitungszeit für das Erlernen dieser neuen Prozesse möglichst kurz ausfällt, bietet es sich an, mit detaillierten Beschreibungen der definierten Standardprozesse zu arbeiten und ggf. in den Betrieben regelmäßige Anwenderschulungen durchzuführen.
Interessenkonflikt:
Die Autoren sind Mitarbeiter des Unternehmens Häussler Technische Orthopädie GmbH, die unter der Marke TOplus 3D-Scanwerkzeuge entwickelt und herstellt.
Für die Autoren:
Steffen Matyssek, M.Sc.
Häussler Technische Orthopädie GmbH
Jägerstraße 6
89073 Ulm
E‑Mail: matyssek@haeussler-ulm.de
Begutachteter Beitrag/reviewed paper
Matyssek S, Krieger A. Möglichkeiten einer digitalen Modellerstellung mit Hilfe von 3D-Scanwerkzeugen. Orthopädie Technik, 2024; 75 (8): 46 –52



- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Konservative Versorgung einer adulten Skoliose mit einem modularen Bausatz – ein Versorgungsbeispiel — 6. März 2026
- Köster A. Möglichkeiten der digitalen Prozesskette in der Orthopädie-Technik. Orthopädie Technik, 2018; 69 (5): 58–66
- Levertin A. Dr. G. Zander’s Medico-Mechanische Gymnastik. Stockholm: Königl. Buchdruckerei P. A. Norstedt & Söner, 1892
- Kienzle C, Schäfer M. Integration additiver Fertigungsverfahren (3D-Druck) in den orthopädietechnischen Versorgungsalltag. Orthopädie Technik, 2018; 69 (5): 48–55
- Scanwerkzeuge TOplus: https://www.to-plus.de/produkte-and-hilfsmittel/3d-scanwerkzeuge (Zugriff am 13.06.2024)
- Thies F, Fürl M. Digital assistierter Fertigungsprozess im individuellen Sitzschalenbau. Orthopädie Technik, 2020; 71 (7): 24–29
- Scanwerkzeuge TOplus: https://www.to-plus.de/produkte-and-hilfsmittel/3d-scanwerkzeuge (Zugriff am 13.06.2024)
- Scanwerkzeuge TOplus: https://www.to-plus.de/produkte-and-hilfsmittel/3d-scanwerkzeuge (Zugriff am 13.06.2024)
- Scanwerkzeuge TOplus: https://www.to-plus.de/produkte-and-hilfsmittel/3d-scanwerkzeuge (Zugriff am 13.06.2024)
- Kienzle C, Schäfer M. Integration additiver Fertigungsverfahren (3D-Druck) in den orthopädietechnischen Versorgungsalltag. Orthopädie Technik, 2018; 69 (5): 48–55
- Scanwerkzeuge TOplus: https://www.to-plus.de/produkte-and-hilfsmittel/3d-scanwerkzeuge (Zugriff am 13.06.2024)