Einleitung
Mobilität ist in unserer alternden Gesellschaft ein unverzichtbares Grundbedürfnis – sie ist eine Voraussetzung für Unabhängigkeit: Nur wer mobil ist, kann am gesellschaftlichen Leben teilnehmen, soziale Kontakte pflegen und seinen Alltag selbstständig gestalten 1. Gerade für Senioren ist individuelle Mobilität wichtig – sie ist entscheidend für ihre Lebensqualität. Heutzutage verbinden viele Menschen die Zeit nach ihrer Pensionierung mit der Vorstellung, die Welt zu erkunden und endlich Zeit für Reisen und Unternehmungen zu haben, für die während der Erwerbstätigkeit zu wenig Zeit war. Je länger Menschen mobil bleiben, desto gesünder bleiben sie und umso später setzen altersbedingte Abbauprozesse ein. Trotz steigenden Alters bleibt es für Senioren wichtig, Einkäufe und Erledigungen selbstständig bewerkstelligen und somit eine alltägliche Routine aufrechterhalten zu können. Fallen solche Gewohnheiten wegen Einschränkungen der Mobilität weg, so sinkt die Lebensqualität rapide, und die Gesundheit leidet 23.
Dabei ist Mobilität auf kürzeren und auf längeren Wegstrecken gleichermaßen bedeutsam: Sowohl den Weg zum Bäcker und zum Optiker als auch die Strecke zum Arzt im Nachbarort wollen die meisten Senioren selbstständig bewältigen können. Allerdings fällt vielen Menschen mit zunehmendem Alter das Laufen immer schwerer, vor allem aufgrund von Krankheiten wie Arthrose, Sarkopenie, Muskelschwund oder nach einem Schlaganfall. Selbst für kürzere Strecken ist dann ein elektrisch angetriebener Rollstuhl unverzichtbar. Für längere Strecken steht das eigene Auto bereit, das dank Fahrerassistenzsystemen und anderer technischer Hilfen auch von Menschen mit körperlichen Einschränkungen selbstständig gefahren werden kann. Problematisch ist dann aber das Umsteigen vom Rollstuhl auf den Fahrersitz und das Verstauen des Rollstuhls im Kofferraum. Auch Treppen und Stufen, die mit einem Rollstuhl nicht ohne fremde Hilfe überwunden werden können, stellen ein Problem dar – sowohl Treppen in Häusern als auch Stufen auf öffentlichen Wegen oder am Eingang von Gebäuden, die trotz anhaltender Bestrebungen, die Welt barrierefrei zu gestalten, noch längst nicht alle eliminiert sind.
Bislang gibt es noch kein Produkt, das alle der beschriebenen Probleme löst 4. Daher haben die Verfasser ein neuartiges Mobilitätssystem entwickelt. Ziel war es, eine völlig autonom verwendbare technische Hilfe zu schaffen, mit der der Nutzer seine unabhängige Mobilität behalten kann. Durch die Kombination eines treppensteigenden Rollstuhls mit einer Kfz-Sitz- Integration ergibt sich eine ganzheitliche Mobilitätslösung, die dem Nutzer das schwierige, kraftaufwendige Umsteigen zwischen verschiedenen Rollstühlen, dem Rollstuhl und einem Treppenlift sowie zwischen dem Rollstuhl und dem Autositz erspart. Das System (Abb. 1) kann sich sowohl im Haus als auch draußen auf kurzen und mittleren Strecken autonom fortbewegen und dabei sogar Hindernisse wie Treppen überwinden. Es verfügt aber auch über Schnittstellen, die für längere Strecken eine einfache Integration in ein serienmäßiges Auto ermöglichen 5.
Kernstück des Mobilitätssystems ist ein Sitz, der sowohl im Pkw als Fahrersitz als auch außerhalb des Autos auf einem elektrisch angetriebenen Rollstuhlfahrwerk Verwendung findet. Bei der Konstruktion des Fahrwerks stand ein wendiges Konzept im Fokus, das innerhalb der Wohnung und auch für kleine Distanzen im Outdoorbereich verwendet werden kann. Außerdem wurde auf eine intuitive Bedienung und einen zuverlässigen Treppensteigmechanismus geachtet. Somit kann der Nutzer alle Wege des Alltags – die kurze Strecke in der Wohnung vom Bad im Obergeschoss in die Küche im Erdgeschoss, die mittlere Strecke durch die Fußgängerzone zum Supermarkt wie auch eine längere Strecke per Pkw – selbstständig und ohne Umsteigen von einem Sitz auf den anderen absolvieren. Für all diese Wege ist keine Hilfe einer zweiten Person nötig.
Fahrwerk mit Treppensteigfunktion
Auf kurzen und mittleren Strecken befindet sich der Universalsitz auf einem Segway-ähnlichen Fahrwerk und bildet gemeinsam mit ihm einen extrem wendigen Rollstuhl (Abb. 2). Dabei wird der Rollstuhl auf nur einer Achse, also einem Radpaar, balanciert. Jedes Rad wird durch einen separaten Elektromotor dynamisch gesteuert; die Motoren halten den Schwerpunkt genau über der Radachse.
Nur in der Parkposition und vor dem Treppensteigen wird zur Stabilisierung ein zweites, kleineres Radpaar ausgefahren. Dank dieser einachsigen Bewegungsweise hat der Rollstuhl einen sehr kleinen Wendekreis; er kann sich beinahe auf der Stelle drehen. So ist er auch innerhalb der Wohnung zwischen Möbeln präzise lenkbar.
Für den Treppenmodus befinden sich zwischen den Rädern zwei ausklappbare Beine, die sich ähnlich den menschlichen Beinen aus Ober- und Unterschenkel zusammensetzen. Jeder dieser Schenkel wird von einem separaten Elektromotor bewegt; auch das ist eine Ähnlichkeit zum Muskelapparat an den menschlichen Beinen.
Im Rahmen des Projekts wurden auch bereits vorliegende Forschungsergebnisse anderer Gruppen näher beleuchtet, die Treppensteigmechanismen mit Raupenbändern, Sternrädern und Clusterrädern entwickelt haben; lediglich raupenbasierte Mechanismen sind ausreichend kipp- und absturzsicher, damit sie auch ohne Hilfsperson betrieben werden können. Allerdings fallen Raupenbänder durch ihre große und schwerfällige Bauform auf – das wirkt sich nicht nur negativ auf die Ästhetik aus, sondern behindert auch das wendige Manövrieren in engen Räumen. Der Mechanismus mit Beinen hat diesen Nachteil nicht, außerdem wurden Schenkellänge und Geometrie der Beine so gewählt,
- dass die Beine im Fahrmodus vollständig ins Fahrwerk eingeklappt sein können,
- dass alle Treppenstufen mit DIN-Norm befahren werden können und
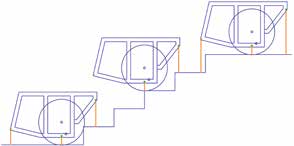
- dass die Beine maximal ausgestreckt über drei Stufen reichen (Abb. 3) 6.
Damit ist gewährleistet, dass neben den beiden Antriebsrädern immer mindestens ein Bein Bodenkontakt hat. Das Mobilitätssystem hat beim Treppensteigen also stets drei bis vier Auflagepunkte und dadurch eine hohe Stabilität.
Fährt der Rollstuhl an eine Stufe oder Treppe heran, dann erkennen die Ultraschallsensoren des Fahrwerks das Hindernis. Zunächst wird zur Erhöhung der Stabilität ein zweites, kleines Radpaar aus dem Fahrwerk herausgefahren. Dann wendet der Rollstuhl und fährt langsam rückwärts an die Treppe heran, bis die beiden Räder die erste Stufe berühren. Anschließend fahren die beiden ausklappbaren Beine aus dem Fahrwerk heraus und positionieren ihre „Füße“ zwischen den Rädern auf dem Untergrund. Mit ihren Elektromotoren schieben die Beine den Rollstuhl auf die nächsthöhere Stufe, bevor sie sich nacheinander neu positionieren (Abb. 4). Anschließend schieben sie den Rollstuhl erneut auf die nächste Stufe und positionieren sich wieder neu.
So erklimmt der Rollstuhl Stufe für Stufe, bis die gesamte Treppe bewältigt ist. Anschließend werden die Beine wieder eingefahren, und das Fahrwerk schaltet automatisch in den Fahrmodus um. Auf analoge Weise können auch Treppen nach unten überwunden werden 7.
Die Treppenabtastung erfolgt über Ultraschallabstandssensoren. Aus drei Sensorpaaren, die am Fahrwerk jeweils vorne, mittig und hinten platziert sind, können alle relevanten Informationen für den Steigvorgang extrahiert werden (Abb. 5). Ein Mikroprozessor, der sich hinter dem Sitz befindet, berechnet aus diesen Informationen die notwendigen Beinpositionen, die nötig sind, um sicher die nächste Stufe zu erklimmen 8. In der aktuellen Entwicklungsstufe kann das „AssistMobil“ auf diese Weise alle geraden Treppen überwinden, die auf der DIN-Norm für Treppenmaße beruhen. Inwieweit sich das Konzept auch auf anderen Treppen, etwa besonders engen oder steilen Treppen sowie Wendeltreppen, anwenden lässt, muss in den folgenden Entwicklungsschritten noch erörtert werden. Das Gleiche gilt für die Anpassung der Auflagepunkte der Beine an verschiedene Untergründe, z. B. rutschige Treppen im Freien. Auch die Sicherung des Nutzers auf dem Rollstuhlsitz während des Treppensteigens wird ein Thema der weiteren Entwicklung sein.
Integration des Sitzes ins Auto
Um längere Distanzen selbstständig per Auto zurücklegen zu können, kann der Sitz des „AssistMobil“ einfach in einen Serien-Pkw integriert werden. Diese Fahrzeugintegration basiert auf einem modifizierten Sitztransfer system der Firma Autoadapt. Bei diesem System wird der Fahrersitz mit Fahrer durch einen Mechanismus aus dem Auto herausgeschwenkt und auf ein Rollstuhlfahrwerk gesetzt; beim Einsteigen erfolgt dies in umgekehrter Weise. Allerdings wird beim Originalsystem immer eine zweite Person benötigt, die den Rollstuhl im Kofferraum verstaut bzw. dort herausholt 9.
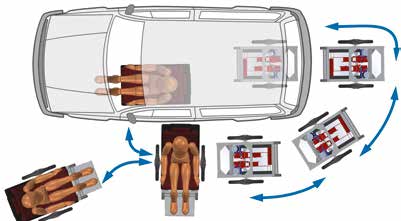
Beim neuen Mobilitätssystem funktioniert das automatisch: Will der Nutzer in seinen Pkw umsteigen, so fährt er mit dem Rollstuhl an die Fahrertür heran. Das leicht modifizierte Sitztransfersystem der Firma Autoadapt nimmt den Sitz vom Fahrwerk des Rollstuhls ab und schwenkt ihn ins Auto (Abb. 6). Der Nutzer bleibt also auf demselben Sitz und nutzt ihn im Pkw als Fahrersitz. Das Rollstuhlfahrwerk fährt anschließend automatisch zum Heck und verstaut sich selbstständig im Kofferraum. Am Ziel angekommen lädt es sich automatisch wieder aus und fährt zur Fahrertür, damit der Fahrer samt Sitz wieder herausgeschwenkt werden kann.
Bedienkonzept
Die Bedienung des gesamten „AssistMobil“ erfolgt intuitiv – so können auch ältere oder bewegungseingeschränkte Menschen das Mobilitätssystem mühelos bedienen. Am Sitz befindet sich ein Joystick mit wenigen zusätzlichen Tasten, mit denen die Grundfunktionen gesteuert werden können. Über den Joystick kann der Rollstuhl vorwärts und rückwärts gefahren bzw. seitwärts gelenkt werden. Eine der Tasten aktiviert und deaktiviert den Parkmodus, bei dem die zusätzlichen, kleinen Räder ausgefahren und der Regelungsmechanismus abgeschaltet wird, der den Rollstuhl auf zwei Rädern balanciert. Im aktivierten Parkmodus kann der Nutzer ein- und aussteigen oder einfach parken, beispielsweise am Tisch beim Essen. Eine weitere Taste aktiviert den Treppenmodus, in dem der Rollstuhl mit Hilfe seiner Sensoren nach einer Treppe sucht, an sie heranfährt und mit dem Steigvorgang beginnt. Dabei reagiert der Joystick nur noch auf die Befehle „nach vorne“ oder „nach hinten“, was in diesem Fall „nach unten“ bzw. „nach oben“ bedeutet. Die Lenkfunktion ist während des Treppensteigens deaktiviert. Wird der Joystick auf einer Treppe losgelassen, verharrt der Rollstuhl in einer sicheren Position 10.
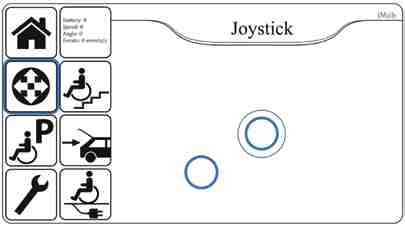
Neben der fest installierten Bedieneinheit kann das Mobilitätssystem aber auch per Smartphone oder Tablet-PC bedient werden (Abb. 7). Ein Modul am Fahrwerk stellt dafür einen WLAN-Access-Point zur Verfügung; damit ist der Rollstuhl in WLAN-Reichweite fernsteuerbar. Die Nutzeroberfläche verfügt über einen virtuellen Joystick, die Taste für den Parkmodus, die Taste für den Treppenmodus und zusätzlich auch über eine Kofferraumtaste, die die automatische Verladefunktion in den Kofferraum aktiviert. Außerdem gibt es eine Taste für den Ladevorgang: Damit kann der Nutzer seinen Rollstuhl abends vom Bett aus zur Ladestation schicken und ihn morgens wieder zu sich rufen.
Zusammenfassung und Ausblick
Mit Hilfe des „AssistMobil“ kann der Nutzer alle Wege des Alltags – vom Aufstehen am Morgen bis zum Zubettgehen am Abend – auf demselben Sitz bewerkstelligen, ohne fremde Hilfe zu benötigen. Will er zwischendurch aufstehen und einige Tätigkeiten auf eigenen Beinen durchführen, so fährt der Rollstuhl automatisch an einen vor gegebenen Platz in den Parkmodus, beispielweise an seine Ladestation. Der Nutzer ist somit maximal flexibel; das Mobilitätssystem bietet ihm ganztags unabhängige Mobilität. Natürlich ist es auch denkbar, dem System andere Aufgaben zuzuweisen: Es könnte nicht nur zugunsten der Mobilität von Menschen, sondern etwa für den Transport von Lasten über kurze und mittlere Strecken eingesetzt werden. Dabei könnte es – mit GPS, 3D-Kameras und der entsprechenden Software ausgestattet – als kleines, autonomes Lastenfahrzeug von A nach B unterwegs sein. Die Grundlagenentwicklung des „AssistMobil“ ist inzwischen abgeschlossen – derzeit suchen die Autoren nach Investoren und Partnern, um die weitere Entwicklung gemeinsam mit dem Steinbeis-Transferzentrum durchzuführen und das System auf den Markt zu bringen.
Für die Autoren:
Prof. Dr. rer. nat. habil. Bernhard Wolf
Technische Universität München
Fakultät für Elektrotechnik und
Informationstechnik
Theresienstr. 90
80333 München sowie
SteinbeisTransferzentrum Medizinische
Elektronik und Lab on ChipSysteme
Fendstr. 7
80802 München
wolf@tum.de
Begutachteter Beitrag/reviewed paper
Wolf B, Friedrich P, Scholze Ch. Jederzeit mobil auch im Alter – der treppensteigende bionische Rollstuhl. Orthopädie Technik, 2017; 68 (10): 31–35





- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Schlag B. Mobilität und Alter. Band 3: Leistungsfähigkeit im Alter. Köln: TÜV-Media Verlag, 2008
- Schlag B. Sichere Mobilität im Alter? Probleme älterer Verkehrsteilnehmer in Städten und Gemeinden. DVR-Presseseminar „Innerorts – Raum für alle!?“. Dresden, 2008. https://www.dvr.de/presse/seminare/879_50.htm (Zugriff am 14.09.2017)
- Zauner P. Der Autofahrer der Generation Plus. Göttingen: Cuvillier Verlag, 2007
- Häcker M, Obermayer M, Friedrich P, Wolf B. Konzepte und Lösungen für assistierte Mobilität im Alter. 6. Deutscher AAL-Kongress Berlin. Berlin: VDE Verlag, 2013
- Häcker M. Barrierefreiheit in der Stadt am Beispiel von iMob. VDE-Kongress, Frankfurt am Main, 20./21.10.2014
- Hinderer M, Friedrich P, Wolf B. An autonomous stair-climbing wheelchair. Robotics and Autonomous Systems, 2017; 94: 219–225
- Häcker M, Friedrich P, Wolf B. New mobility concepts for disabled and elderly people. IEEE Third International Conference on Consumer Electronics – ICCE Berlin. Berlin, 2013: 39–41
- Hinderer M, Friedrich P, Wolf B. An autonomous stair-climbing wheelchair. Robotics and Autonomous Systems, 2017; 94: 219–225
- Häcker M. Barrierefreiheit in der Stadt am Beispiel von iMob. VDE-Kongress, Frankfurt am Main, 20./21.10.2014
- Hinderer M, Friedrich P, Wolf B. An autonomous stair-climbing wheelchair. Robotics and Autonomous Systems, 2017; 94: 219–225
