Grenzen der Versorgung transfemoral amputierter Menschen
Die auf dem Markt erhältlichen Prothesen für transfemoral Amputierte sind Modular-Prinzipe, welche aus einem Kniegelenk und einer Fuß-Knöchelgelenk-Einheit bestehen. Viele Amputierte sind bereits mit einem mikroprozessorgesteuerten Kniegelenk ausgestattet, das ihr Verhalten während des Gehens in Echtzeit anpassen kann. Im Gegensatz dazu bestehen Fuß-Knöchelgelenk-Module in der Regel lediglich aus einem energierückführenden Fuß, einer Feder aus Verbundmaterial, welche in der Lage ist, während der Standphase Energie zu speichern und diese während der Vortriebsphase wieder abzugeben. Dies ist vor allem auf das höhere Gewicht von Prothesen zurückzuführen, die ein prothetisches Knöchelgelenk umfassen. Da sich der Prothesenfuß am distalen Ende der Prothese befindet, wirkt sich das höhere Gewicht der Prothese besonders stark auf das Gehen von transfemoral amputierten Anwendern aus1. Daher profitieren Oberschenkelamputierte in der Regel nicht von den Anpassungsmöglichkeiten, die neuere Prothesenknöchelgelenke bieten. Darüber hinaus ist es aufgrund des modularen Aufbaus der heutigen Prothesen nicht möglich, die Synergien zwischen den Gelenken zu reproduzieren, die bei asymptomatischen Anwendern durch die biartikuläre Muskulatur entstehen.
Die Prothesen für transfemoral amputierte Anwender sind daher nicht anpassungsfähig, insbesondere beim Gehen auf unebenen Untergründen, an Schrägen oder auf Treppen, bei denen Amputierte ihren Fuß auf der Treppenkante positionieren müssen2 3 4 5.
Diese Überlegungen haben zur Entwicklung von Synsys (SYNergetic SYStem) geführt. Dieses Prothesensystem für transfemoral amputierte Anwender umfasst 2 Gelenke, die die Beweglichkeit des Knie- und Sprunggelenks nachbilden. Ein gemeinsames Hydrauliksystem zwischen diesen beiden Gelenken reproduziert die Synergie, die bei asymptomatischen Anwendern vorhanden ist. Ein Mikroprozessor steuert das Verhalten der Prothese und ermöglicht, sowohl das Kniegelenk an die verschiedenen Phasen des Gangzyklus als auch die Position des Knöchelgelenkes der jeweiligen Situation anzupassen.
Das Synsys-Prothesensystem
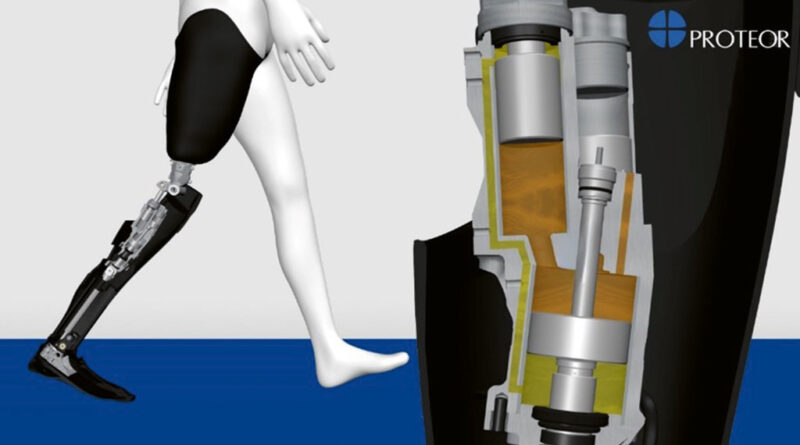
Die beiden Hydraulikzylinder des Synsys-Prothesensystems ermöglichen die Steuerung der beiden zuvor erwähnten Gelenke (Abb. 1). Die Kammern dieser beiden Zylinder sind über einen Hydraulikkreis miteinander verbunden, der so konzipiert ist, dass eine Beugung des Kniegelenks eine Dorsalflexion des Knöchelgelenks proportional nach sich zieht. Diese Synergie ermöglicht die Dorsalflexion des Prothesenfußes während der Schwungphase. Während der Standphase ermöglicht diese Synergie eine Dorsalflexion des Prothesenfußes, so dass der Fuß bei einer Beugung des Prothesenkniegelenks flach auf dem Boden bleibt. Das Hydrauliksystem sorgt zudem für eine gedämpfte Bewegung des Knöchelgelenkzylinders in Richtung der Plantarflexion. Das kompakte Design der Prothese ermöglicht einen sehr großen Bewegungsspielraum im Knöchelgelenk, wobei sich das Gewicht im proximalen Bereich (kniegelenksnah) konzentriert und dadurch eine Erhöhung des gefühlten Gewichts des Prothesenknöchelgelenks vermieden wird. Der Bewegungsspielraum des Knöchelgelenks beträgt mindestens 42°, verteilt je nach Absatzhöhe der gewählten Schuhe auf Plantar- und Dorsalflexion.
Ein motorbetriebenes Ventil sorgt für die Steuerung des Hydraulikflusses bei einer Flexionsbewegung des Kniehebers. Dadurch wird der Beugewiderstand des Kniegelenks angepasst. Die Extensionsbewegungen sind hingegen frei. Die Steuerung dieses Ventils erfolgt durch den Mikroprozessor, der die in der Prothese eingebauten Sensoren nutzt, um die verschiedenen Phasen des Gehens zu erkennen und das Verhalten des Kniegelenkes anzupassen. Durch diese Technologie wird eine gebremste Kniebeugung vor dem Aufsetzen des Fußes auf den Boden und während der gesamten Standphase gewährleistet, während in der Schwungphase eine freie Kniebeugung zugelassen wird.
Die Neutralstellung des Knöchelgelenks wird durch einen Dorsalflexionsanschlag definiert, der einen Öldurchgang blockiert, wenn der Knöchelgelenkzylinder nach unten bewegt wird (Dorsalflexion des Fußes). Die Position dieses Anschlags ist über einen Elektromotor einstellbar. Das System ist daher in der Lage, die Neutralstellung des Knöchelgelenks während des Gehens anzupassen, was der Prothese eine Anpassung des Knöchelgelenks beim Begehen von Schrägen ermöglicht.
Die mikroprozessorgesteuerte Kniegelenkstechnologie
In der Schwungphase
Mit der Entwicklung der Elektronik haben Mikroprozessoren, die eingebettete Sensoren verwenden, eine Trennung der Steuerung zwischen der Stand- und Schwungphase ermöglicht. Dank dieses Ansatzes konnte zunächst die Entwicklung von Kniegelenken mit Mikroprozessoren erfolgen, die ihr Verhalten während der Schwungphase anpassen können und so eine Adaption der Prothese an die Gehgeschwindigkeit möglich machen6 7 8 9.
Im Synsys-Prothesensystem regelt die Schwungphasensteuerung die Höhe des Fersenaufschwungs bei der Pendelflexion proportional zur Gehgeschwindigkeit, wodurch ein optimales Schwungphasenverhalten unabhängig von der Gehgeschwindigkeit gewährleistet wird.
In der Standphase
In der Folge wurden Kniegelenke mit Mikroprozessoren für die Standphase entwickelt – was zu einer Verringerung des Sturzrisikos führte. Insbesondere die Gewährleistung eines ausreichenden Beugewiderstands des Kniegelenks, um den Anwender in Antizipation des Prothesenfußstands zu unterstützen, führt zu einer Verringerung des Sturzrisikos10 11 12 13. Dieser Ansatz wurde im Synsys-Prothesensystem genutzt.
Im Falle eines Stolperns kann die Kontrolle der Standphase die Entwicklung von Strategien zum Auffangen eines Sturzes ermöglichen, indem das Gelenk den Sturz erkennt. Es ist auch möglich, Stürze zu antizipieren, indem man einen hohen Flexionswiderstand gewährleistet und gleichzeitig einen geringen Extensionswiderstand beibehält, während das Prothesenkniegelenk wieder gestreckt wird. Auf diese Weise wird der Amputierte, wenn er beim Durchführen des Prothesenschritts stolpert, von seiner Prothese gestützt14 15 16 17 18 19. Bei der Synsys-Prothese wird das Ventil, das die Knieflexion steuert, nach Beendigung der Pendelflexion vollständig geschlossen, während die Kniestreckung frei bleibt. Im Falle eines Stolperns kann sich der Anwender dann auf die Prothese stützen, um sich aufzufangen, da die Beugung blockiert ist.
Die Standphasenkontrolle steuert die Beugung des Prothesenkniegelenks in der Standphase und unterstützt so den Anwender beim Schrägen- und Treppenabgehen, um ein sicheres Bergabgehen in Wechselschritten zu gewährleisten20 21 22. Das Synsys-Prothesensystem nutzt seine eingebauten Sensoren, um die Beugung des Kniegelenks in der Standphase zu erkennen und unterstützt so während des gesamten Gehzyklus (Abb. 2).
Ein kontrolliert bewegliches Knöchelgelenk
Die üblicherweise von transfemoral amputierten Anwendern verwendeten Prothesen haben kein Knöchelgelenk und die einzige Bewegung des Prothesenfußes in Bezug zur Prothesentibia ist die, welche durch die Deformation des Fußes ermöglicht wird. Diese mangelnde Beweglichkeit des Knöchelgelenks führt dazu, dass das Druckzentrum in der Prothesenstützphase signifikant länger unter der Ferse verbleibt als in der kontralateralen Stützphase oder bei asymptomatischen Anwendern23. Diese Unterbrechung der Vorwärtsbewegung des Druckzentrums wirkt sich auf die Vorwärtsbewegung des Massenzentrums aus und kann von Amputierten als „toter Punkt“ oder „Ruckeln“ beim Abrollen des Schrittes empfunden werden24. Durch das Hinzufügen eines hydraulisch gesteuerten Knöchelgelenks wird ein normalerer Verlauf des Druckzentrums wiederhergestellt, was sich auf den gesamten Körper auswirkt, wie die geringere Verringerung der Geschwindigkeit des Massenmittelpunkts und die höhere Gehgeschwindigkeit bei Oberschenkelamputierten zeigen25.
Darüber hinaus kann ein Teil der Schwierigkeiten, die beinamputierte Menschen in verschiedenen Alltagssituationen haben (z. B. bei Steigungen, Schrägen oder Treppen), auf eine dahingehende mangelnde Anpassung des Fußes und des Sprunggelenks zurückgeführt werden26 27 28 29. Das Hinzufügen eines Knöchelgelenks ermöglicht einen größeren Bewegungsumfang und verbessert die Anpassung der Prothese in diesen Situationen. Alexander et al. berichten, dass bei einem transfemoral amputierten Anwender, der ein hydraulisches Knöchelgelenk verwendet, das Moment an der Hüfte beim Begehen einer Steigung reduziert wurde30. Eine andere Studie berichtet, dass das Gehen transfemoral amputierter Anwender auf Steigungen bei Verwendung einer hydraulischen Komponente im Vergleich zu einem konventionellen Prothesenfuß eher dem Gehen asymptomatischer Personen entspricht31. Hydraulische Knöchelgelenke ermöglichen auch ein leichteres Stehen auf Schrägen, insbesondere wenn dieses Knöchelgelenk mit einem mikroprozessorgesteuerten Kniegelenk kombiniert wird32.
Das hydraulische Knöchelgelenk der Synsys-Prothese ermöglicht einen plantarflektorischen Bewegungsumfang von bis zu 22°. Dieser sehr große Bewegungsumfang erlaubt eine vollständige Plantarflexion des Fußes in allen Situationen. Eine hydraulische Einstellung der Plantarflexion ermöglicht die Kontrolle dieser Bewegung.
Beinamputierte Menschen sind auch hinsichtlich der Schuhe, die sie tragen können, eingeschränkt. Bei Nichtamputierten kann sich das Knöchelgelenk beim Schuhwechsel an die veränderte Absatzhöhe anpassen. Bei Amputierten verhindert das Fehlen des Knöchelgelenks eine Anpassung des Fußes. Die Änderung der Absatzhöhe wirkt sich direkt auf die Ausrichtung der Prothese aus33 34 35. Frauen sind von der Schwierigkeit, den Schuh zu wechseln, besonders betroffen, was die Akzeptanz des Tragens der Prothese erschwert und zu höheren Ausfallraten bei Frauen beiträgt36.
Um dieser Schwierigkeit zu begegnen, wurden mehrere Prothesenfüße entwickelt, deren Ausrichtung leicht verändert werden kann, um sie an verschiedene Schuhe anzupassen. Diese Art von Prothesenfüßen erfordert jedoch, dass der Anwender in der Lage ist, ihre Ausrichtung selbstständig wiederherzustellen37 38. Ein Forschungsteam hat auch einen Prothesenfuß vorgeschlagen, der aus einem Knöchelgelenkmodul besteht, das in einem 3D-gedruckten Prothesenfuß befestigt wird. Mithilfe des 3D-Drucks kann für jeden Schuh ein anderer Prothesenfuß hergestellt werden. Bei diesem Ansatz bleibt die Ausrichtung der Prothese erhalten, aber die Funktionalität des Prothesenfußes ist eingeschränkt, insbesondere fehlt die Energierückgabe39.
Beim Synsys-Prothesensystem wird die Ausrichtung des Knöchelgelenks durch den motorisierten Dorsalflexionsanschlag definiert. Es ist daher möglich, mehrere Einstellungen zu speichern, die verschiedenen Absatzhöhen von Schuhen entsprechen. Dies ist ein bedeutender Vorteil und eine außergewöhnliche Erfahrung für Prothesenträger, da sie in der Schuhauswahl nicht mehr limitiert sind und so der Wechsel von Schuhwerk bedenkenlos möglich ist. Bis zu 10 verschiedene Absatzhöhen können stufenlos voreingestellt werden (Barfuß + 9 programmierbare Absatzhöhen bis zu 5 cm), ohne die Statik zu beeinflussen. Der Wechsel von einem Schuh zum anderen erfolgt dann einfach über eine App. Wenn der Anwender nicht in der Lage ist, seine eigene Einstellung zu finden, wird die Aufzeichnung der verschiedenen Einstellungen mit dem Orthopädietechniker vorgenommen.
Schließlich können einige mikroprozessorgesteuerte Knöchelgelenke die Position des Fußgelenks beim Gehen auf Schrägen anpassen und so den Prothesenschritt erleichtern. Bei transtibial amputierten Anwendern konnte durch eine solche Anpassung die auf der betroffenen Seite übertragene Kraft reduziert werden, wodurch der Druck im Schaft verringert wurde40. Eine andere Studie berichtet von einem Gang beim Bergaufgehen, der dem von asymptomatischen Probanden ähnlicher ist, und von einem verbesserten Sicherheitsgefühl der Anwender41 42 43. Die Motorisierung des Knöchelgelenk-Dorsalflexionsanschlags beim Synsys-Prothesensystem ermöglicht die Anpassung des Knöchels beim Bergaufgehen auf ähnliche Weise.
Die Knie-Knöchelgelenk-Synergie
In der Schwungphase
Der Abstand zwischen Prothesenfuß und Boden ist in der mittleren Schwungphase, beim Durchführen des Schritts, gering. In diesem Moment sind die Stolpergefahr und daraus resultierende Sturzunfälle am höchsten. Menschen mit Amputationen sind bekanntermaßen besonders sturzgefährdet. Die Wahrscheinlichkeit, dass ein Amputierter im Laufe eines Jahres mindestens einmal stürzt, liegt bei über 50 %44. Um dieses Risiko zu verringern, ermöglichen verschiedene prothetische Komponenten eine Vergrößerung des Abstands zwischen Boden und Prothesenfußspitze. Bei transtibial amputierten Anwendern ermöglichen teilaktive Knöchelgelenksysteme eine Vergrößerung dieses Abstands durch eine aktive Dorsalflexion während der Schwungphase. Dies hat zu einem physiologischeren Gehen beim Bergaufgehen geführt und auch das Vertrauen der Amputierten in ihre Prothese verbessert45 46 47 48 49. Bei transfemoral amputierten Menschen werden bionische Knöchelgelenkfüße aufgrund ihres hohen Gewichts selten verwendet, aber andere Prothesenkonzepte ermöglichen es, den Abstand zu vergrößern. Dies ist der Fall bei polyzentrischen Kniegelenken, deren Design den Abstand zwischen der Hüfte und der Prothesenfußspitze stärker verringert, als dies bei herkömmlichen einachsigen Kniegelenken der Fall ist (Abb. 3) 50 51.
Um den Abstand zwischen Prothesenfuß und Boden während der Schwungphase zu vergrößern, besteht ein weiterer Ansatz, der bei der Entwicklung von Prothesen für transfemoral amputierte Anwender genutzt werden kann. Dieser besteht darin, die synergetische Bewegung nachzuahmen, die bei Nichtamputierten zwischen Kniegelenk und Knöchelgelenk besteht. Dieser Ansatz führte unter anderem zur Entwicklung der Hydra-Cadence-Prothese, welche ein gemeinsames Hydrauliksystem zwischen Knie- und Knöchelgelenk nutzt, um eine aktive Dorsalflexion des Knöchelgelenks während der Schwungphase zu ermöglichen52.
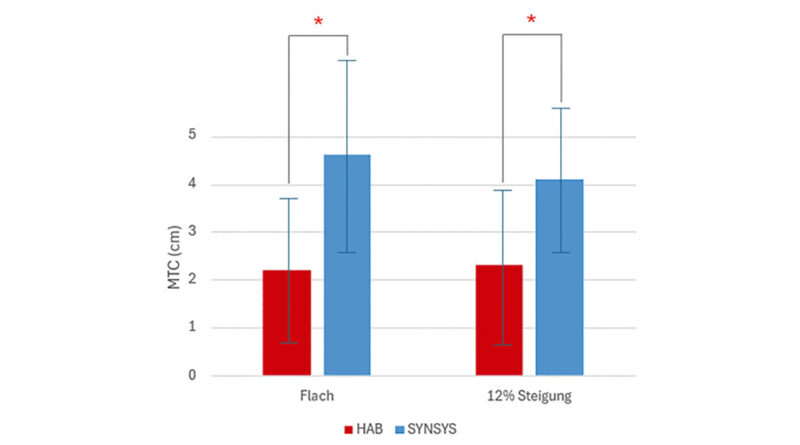
Die Synsys-Beinprothese nutzt das gleiche Prinzip und ermöglicht somit eine aktive Dorsalflexion des Knöchelgelenks während der Schwungphase. Bei der Erprobung der Prothese durch 12 transfemoral amputierte Anwender, die abwechselnd mit dem Synsys-Prothesensystem und mit ihrer üblichen mikroprozessorgesteuerten Prothese gingen, führte diese Dorsalflexion im Durchschnitt zu einer Vergrößerung des Abstands zwischen Boden und Prothesenfußspitze um mehr als 2 cm beim Gehen auf ebenem Boden und beim Bergaufgehen (Abb. 4)53.
In der Standphase
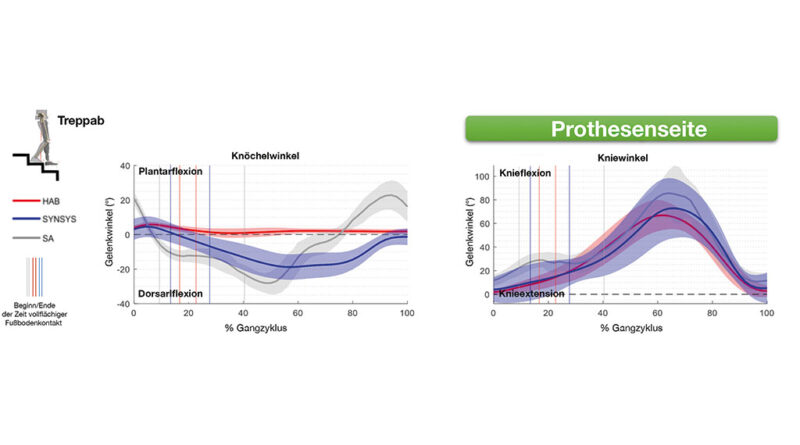
Mit den heutigen mikroprozessorgesteuerten Kniegelenken erfordert Treppabgehen Kompensationsmaßnahmen, von denen die offensichtlichste die Platzierung des Prothesenfußes auf der Stufenkante ist. Diese Strategie ermöglicht die Rotation des Fußes relativ zur Stufe und gleicht so die mangelnde Beweglichkeit des Prothesenknöchelgelenkes aus, verringert jedoch die Kontaktfläche zwischen Prothesenfuß und Stufe und damit die Stützbasis. Mit Synsys kann durch die Synergie zwischen Knie- und Sprunggelenk die bei asymptomatischen Personen beobachtete Beweglichkeit des Sprunggelenks wiederhergestellt werden, so dass der Prothesenfuß vollständig auf der Stufe aufgesetzt werden kann. Diese Strategie führt zu einer Vergrößerung des Knöchel- und Kniegelenkwinkels auf der Prothesenseite, wie in Abbildung 5 dargestellt. Sie zeigt die Knöchel- und Kniegelenkwinkel, die bei einem amputierten Anwender beim Treppabgehen mit dem Synsys-System (blau) und dem üblichen mikroprozessorgesteuerten Kniegelenk (rot) im Vergleich zu den Durchschnittskurven Nicht-amputierter (grau) ermittelt wurden.
Fazit
Die in der Wissenschaft ständig neu gewonnenen Erkenntnisse und der Einsatz moderner Technologien und Materialien ermöglichen heutzutage zeitgemäße Prothesenversorgungen. Das einzigartige, integrale mechatronische Synsys von Proteor (Dijon, Frankreich), das mit einer gleichzeitigen Koordination der Knöchel- und Kniebewegungen im Zusammenspiel mit der Hüftbeugung entwickelt wurde, kann Alltagssituationen des Anwenders erleichtern und eröffnet neue Ansätze für zukünftige Entwicklungen von Prothesenpassteilen. Die Funktionsweise erleichtert Betroffenen alltägliche Bewegungen, die sonst mit einer Oberschenkelprothese nur schwer oder gar nicht möglich sind. Der Bewegungsumfang des Knöchels von 42° sorgt für eine permanente Adaption des Fußes an den Untergrund. Über die Anwender-App können 10 Absatzhöhen von bis zu 5 cm gespeichert werden. Synsys kann durch die funktionellen Vorteile das tägliche Leben von Anwendern verbessern. Stabilität und Sicherheit werden erhöht, alltägliche Bewegungen wieder zur Selbstverständlichkeit.
Interessenkonflikt:
Die Autoren arbeiten für Proteor, Hersteller von Synsys.
Die Autoren:
Clement Duraffourg
Laurine Calistri
Proteor S.A.S.
6 rue de la Redoute
21850 Saint Apollinaire
Frankreich
clement.duraffourg@proteor.com
laurine.calistri@proteor.com
Adam Baier
Proteor Deutschland GmbH
adam.baier@proteor.com
Begutachteter Beitrag/reviewed paper
Duraffourg C, Calistri L, Baier A. Das Synsys-Prothesensystem – technische und klinische Merkmale. Orthopädie Technik, 2024; 75 (12): 70 – 75


Quellenverzeichnis
- Die orthopädietechnische Versorgung mit einer dynamischen Fingerstreckorthese als eigenständige Therapie bei der Dupuytren’schen Kontraktur — 26. März 2026
- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Hekmatfard M, Farahmand F, Ebrahimi I. Effects of prosthetic mass distribution on the spatiotemporal characteristics and knee kinematics of transfemoral amputee locomotion. Gait & Posture, 2013; 37 (1): 78–81. https://doi.org/10.1016/j.gaitpost.2012.06.010
- Morgenroth DC et al. Transfemoral amputee intact limb loading and compensatory gait mechanics during down slope ambulation and the effect of prosthetic knee mechanisms. Clinical Biomechanics, 2018; 55: 65–72. https://doi.org/10.1016/j.clinbiomech.2018.04.007
- Samuelsson KAM et al. Effects of lower limb prosthesis on activity, participation, and quality of life: a systematic review. Prosthetics and Orthotics International, 2012; 36 (2): 145–158. https://doi.org/10.1177/0309364611432794
- Sawers AB, Hafner BJ. Outcomes associated with the use of microprocessor-controlled prosthetic knees among individuals with unilateral transfemoral limb loss: A systematic review. Journal of Rehabilitation Research and Development, 2013; 50 (3): 273–314. https://doi.org/10.1682/JRRD.2011.10.0187
- Vrieling AH et al. Uphill and downhill walking in unilateral lower limb amputees. Gait & Posture, 2008; 28 (2): 235–242. https://doi.org/10.1016/j.gaitpost.2007.12.006
- Bellmann M et al. Immediate Effects of a New Microprocessor-Controlled Prosthetic Knee Joint: A Comparative Biomechanical Evaluation. Archives of Physical Medicine and Rehabilitation, 2012; 93 (3): 541–549. https://doi.org/10.1016/j.apmr.2011.10.017
- Buckley JG, Spence WD, Solomonidis SE. Energy cost of walking: Comparison of “intelligent prosthesis” with conventional mechanism. Archives of Physical Medicine and Rehabilitation, 1997; 78 (3): 330–333. https://doi.org/10.1016/S0003-9993(97)90044–7
- Herr H, Wilkenfeld A. User-adaptive control of a magnetorheological prosthetic knee. Industrial Robot, 2003; 30 (1): 42–55. https://doi.org/10.1108/01439910310457706
- Thiele J et al. Designs and performance of microprocessor controlled knee joints. Biomedizinische Technik, 2014; 59 (1): 65–77. https://doi.org/10.1515/bmt-2013–0069
- Bellmann M, Schmalz T, Blumentritt S. Functional principles of current microprocessor-controlled prosthetic knee joints. Orthopädie Technik, 2009; 60 (5): 297–303
- Bellmann M, Schmalz T, Blumentritt S. Comparative Biomechanical Analysis of Current Microprocessor-Controlled Prosthetic Knee Joints. Archives of Physical Medicine and Rehabilitation, 2010; 91 (4): 644–652. https://doi.org/10.1016/j.apmr.2009.12.014
- McGrath M et al. Can microprocessor knees reduce the disparity in trips and falls risks between above and below knee prosthesis users? PLoS One, 2022; 17 (9): e0271315. https://doi.org/10.1371/journal.pone.0271315
- Wurdeman SR, Miller TA, Stevens PM, Campbell JH. Stability and Falls Evaluations in AMPutees (SAFE-AMP 1): Microprocessor knee technology reduces odds of incurring an injurious fall for individuals with diabetic/dysvascular amputation. Assistive Technology, 2023; 35 (3): 205–210. https://doi.org/10.1080/10400435.2021.2010147
- Bellmann M, Schmalz T, Blumentritt S. Functional principles of current microprocessor-controlled prosthetic knee joints. Orthopädie Technik, 2009; 60 (5): 297–303
- Bellmann M, Schmalz T, Blumentritt S. Comparative Biomechanical Analysis of Current Microprocessor-Controlled Prosthetic Knee Joints. Archives of Physical Medicine and Rehabilitation, 2010; 91 (4): 644–652. https://doi.org/10.1016/j.apmr.2009.12.014
- McGrath M et al. Can microprocessor knees reduce the disparity in trips and falls risks between above and below knee prosthesis users? PLoS One, 2022; 17 (9): e0271315. https://doi.org/10.1371/journal.pone.0271315
- Wurdeman SR, Miller TA, Stevens PM, Campbell JH. Stability and Falls Evaluations in AMPutees (SAFE-AMP 1): Microprocessor knee technology reduces odds of incurring an injurious fall for individuals with diabetic/dysvascular amputation. Assistive Technology, 2023; 35 (3): 205–210. https://doi.org/10.1080/10400435.2021.2010147
- Bellmann M, Köhler TM, Schmalz T. Comparative biomechanical evaluation of two technologically different microprocessor-controlled prosthetic knee joints in safety-relevant daily-life situations. Biomedizinische Technik, 2019; 64 (4): 407–420. https://doi.org/10.1515/bmt-2018–0026
- Crenshaw JR, Kaufmann KR, Grabiner MD. Trip recoveries of people with unilateral, transfemoral or knee disarticulation amputations: Initial findings. Gait & Posture, 2013; 38 (3): 534–536. https://doi.org/10.1016/j.gaitpost.2012.12.013
- Sawers AB, Hafner BJ. Outcomes associated with the use of microprocessor-controlled prosthetic knees among individuals with unilateral transfemoral limb loss: A systematic review. Journal of Rehabilitation Research and Development, 2013; 50 (3): 273–314. https://doi.org/10.1682/JRRD.2011.10.0187
- Hafner BJ, Askew RL. Physical performance and self-report outcomes associated with use of passive, adaptive, and active prosthetic knees in persons with unilateral, transfemoral amputation: Randomized crossover trial. Journal of Rehabilitation Research and Development, 2015; 52 (6): 677–700. https://doi.org/10.1682/JRRD.2014.09.0210
- Highsmith MJ et al. Safety, energy efficiency, and cost efficacy of the C‑Leg for transfemoral amputees: A review of the literature. Prosthetics and Orthotics International, 2010; 34 (4): 362–377. https://doi.org/10.3109/03093646.2010.520054
- Schmid M et al. Centre of pressure displacements in trans-femoral amputees during gait. Gait & Posture, 2005; 21 (3): 255–262. https://doi.org/10.1016/j.gaitpost.2004.01.016
- De Asha AR et al. Attenuation of centre-of-pressure trajectory fluctuations under the prosthetic foot when using an articulating hydraulic ankle attachment compared to fixed attachment. Clinical Biomechanics, 2013; 28 (2): 218–224. https://doi.org/10.1016/j.clinbiomech.2012.11.013
- De Asha AR et al. Impact on the biomechanics of overground gait of using an “Echelon” hydraulic ankle-foot device in unilateral trans-tibial and trans-femoral amputees. Clinical Biomechanics, 2014; 29 (7): 728–734. https://doi.org/10.1016/j.clinbiomech.2014.06.009
- Agrawal V et al. Comparison between microprocessor-controlled ankle/foot and conventional prosthetic feet during stair negotiation in people with unilateral transtibial amputation. Journal of Rehabilitation Research and Development, 2013; 50 (7): 941–950. https://doi.org/10.1682/JRRD.2012.05.0093
- Schmalz T, Blumentritt S, Marx B. Biomechanical analysis of stair ambulation in lower limb amputees. Gait & Posture, 2007; 25 (2): 267–278. https://doi.org/10.1016/j.gaitpost.2006.04.008
- Vickers DR et al. Elderly unilateral transtibial amputee gait on an inclined walkway: A biomechanical analysis. Gait & Posture, 2008; 27: 518–529. https://doi.org/10.1016/j.gaitpost.2007.06.008
- Ernst M et al. Benefits of a microprocessor-controlled prosthetic foot for ascending and descending slopes. Journal of NeuroEngineering and Rehabilitation, 2022; 19 (1): 9. https://doi.org/10.1186/s12984-022–00983‑y
- Alexander N et al. Joint Moments During Downhill and Uphill Walking of a Person with Transfemoral Amputation with a Hydraulic Articulating and a Rigid Prosthetic Ankle – A Case Study. Journal of Prosthetics & Orthotics, 2018; 30 (1): 46–54
- Bai X et al. A biomechanical assessment of hydraulic ankle-foot devices with and without microprocessor control during slope ambulation in trans-femoral amputees. PLOS ONE, 2018; 13 (10): 1–17. https://doi.org/10.1371/journal.pone.0205093
- McGrath M et al. Microprocessor knees with ‘standing support’ and articulating, hydraulic ankles improve balance control and inter-limb loading during quiet standing. Journal of Rehabilitation and Assistive Technologies Engineering, 2018; 5: 205566831879539. https://doi.org/10.1177/2055668318795396
- Hansen AH, Childress DS. Effects of shoe heel height on the roll-over shapes of prosthetic ankle-foot systems: Implications for heel-height-adjustable components. Journal of Prosthetics and Orthotics, 2009; 21 (1): 48–54. https://doi.org/10.1097/JPO.0b013e318191c902
- Jia X, Wang R, Lee W. Effects of Shoe Heel Height on Loading and Muscle Activity for Trans-Tibial Amputees During Standing. Tsinghua Science and Technology, 2009; 14 (3): 281–286. https://doi.org/10.1016/S1007-0214(09)70041–0
- Li X et al. Influence of shoe-heel height of the trans-tibial prosthesis on static standing biomechanics. Annual International Conference of the IEEE Engineering in Medicine and Biology – Proceedings, 2005; 7: 5227–5229. https://doi.org/10.1109/iembs.2005.1615657
- Major MJ, Hansen AH, Russell Esposito E. Focusing research efforts on the unique needs of women prosthesis users. Journal of Prosthetics and Orthotics, 2021
- Hansen AH, Childress DS. Effects of shoe heel height on the roll-over shapes of prosthetic ankle-foot systems: Implications for heel-height-adjustable components. Journal of Prosthetics and Orthotics, 2009; 21 (1): 48–54. https://doi.org/10.1097/JPO.0b013e318191c902
- Meier MR et al. Development of inexpensive prosthetic feet for high-heeled shoes using simple shoe insole model. Journal of Rehabilitation Research and Development, 2014 ; 51 (3):439–450. https://doi.org/10.1682/JRRD.2013.01.0010
- Nickel E et al. Improving footwear options for persons with lower limb amputations. Frontiers in Biomedical Devices, 2020; 7–9. https://doi.org/10.1115/DMD2020-9044
- Wolf SI et al. Pressure characteristics at the stump/socket interface in transtibial amputees using an adaptive prosthetic foot. Clinical Biomechanics, 2009; 24 (10): 860–865. https://doi.org/10.1016/j.clinbiomech.2009.08.007
- Fradet L et al. Biomechanical analysis of ramp ambulation of transtibial amputees with an adaptive ankle foot system. Gait & Posture, 2010; 32 (2): 191–198. https://doi.org/10.1016/j.gaitpost.2010.04.011
- Thomas-Pohl M et al. Microprocessor prosthetic ankles: comparative biomechanical evaluation of people with transtibial traumatic amputation during standing on level ground and slope. Disability and Rehabilitation: Assistive Technology, 2021; 16 (1): 17–26. doi: 10.1080/17483107.2019.1629112
- Weber EL et al. Microprocessor feet improve prosthetic mobility and physical function relative to non-microprocessor feet. Journal of Rehabilitation and Assistive Technologies Engineering, 2022; 9: 20556683221113320. doi: 10.1177/20556683221113320
- Miller WC, Speechley M, Deathe B. The prevalence and risk factors of falling and fear of falling among lower extremity amputees. Archives of Physical Medicine and Rehabilitation, 2001; 82 (8): 1031–1037. https://doi.org/10.1053/apmr.2001.24295
- Fradet L et al. Biomechanical analysis of ramp ambulation of transtibial amputees with an adaptive ankle foot system. Gait & Posture, 2010; 32 (2): 191–198. https://doi.org/10.1016/j.gaitpost.2010.04.011
- Alimusaj M et al. Kinematics and kinetics with an adaptive ankle foot system during stair ambulation of transtibial amputees. Gait & Posture, 2009; 30 (3): 356–363. https://doi.org/10.1016/j.gaitpost.2009.06.009
- Ko CY et al. Comparison of ankle angle adaptations of prosthetic feet with and without adaptive ankle angle during level ground, ramp, and stair ambulations of a transtibial amputee: A pilot study. International Journal of Precision Engineering and Manufacturing, 2014; 15 (12): 2689–2693. https://doi.org/10.1007/s12541-014‑0645‑x
- Rosenblatt NJ et al. Active dorsiflexing prostheses may reduce trip-related fall risk in people with transtibial amputation. Journal of Rehabilitation Research and Development, 2014; 51 (8): 1229–1242. https://doi.org/10.1682/JRRD.2014.01.0031
- Riveras M et al. Minimum toe clearance and tripping probability in people with unilateral transtibial amputation walking on ramps with different prosthetic designs. Gait & Posture, 2020; 81: 41–48. https://doi.org/10.1016/j.gaitpost.2020.07.005
- Gard SA et al. The influence of four-bar linkage knees on prosthetic swing-phase floor clearance. Journal of Prosthetics and Orthotics, 1996; 8 (2): 34–40. https://doi.org/10.1097/00008526–199600820-00004
- Lechler K, Kristjansson K. The importance of additional mid swing toe clearance for amputees. Canadian Prosthetics and Orthotics Journal, 2018; 1 (2): 0–6. https://doi.org/10.33137/cpoj.v1i2.30813
- Sapin E et al. Functional gait analysis of trans-femoral amputees using two different single-axis prosthetic knees with hydraulic swing-phase control: Kinematic and kinetic comparison of two prosthetic knees. Prosthetics and Orthotics International, 2008; 32 (2): 201–218. https://doi.org/10.1080/03093640802016639
- Requena C et al. Increased of stability and security in transfemoral amputees with a knee-ankle synergistic system. Gait & Posture, 2023; 106: 51–52. https://doi.org/10.1016/j.gaitpost.2023.07.065
