Einleitung
Die Frage, nach welchen Kriterien die Auswahl aus verschiedenen Prothesenfußpassteilen bei der Versorgung getroffen wird, ist vielschichtig. Sie ist aus der jeweiligen Sicht der beteiligten Kunden, Ärzte, Techniker, Hersteller und Kostenträger von unterschiedlichen Rahmenbedingungen, Zielsetzungen und Eingriffsmöglichkeiten geprägt. Herstellerfirmen bieten Klassifikationsschemata wie Aktivitätsklasseneinteilungen, Belastungsgrenzen und Amputationshöhen an. Für die SGB-V-Krankenkassen gelten wirtschaftliche Interessen einer notwendigen, ausreichenden und zweckmäßigen Versorgung.
Nach Feststellung der Klinischen Prüfstelle für orthopädische Hilfsmittel der Klinik für Technische Orthopädie am Universitätsklinikum Münster hält der deutsche Markt 148 Modelle industriell gefertigter Fußpassteile zur Auswahl bereit 1. Die damit vorhandene Vielfältigkeit der Prothesenfußpassteile und fehlende standardisierte Auswahlmethoden machen die individuelle Auswahl des geeigneten Prothesenfußes schwierig. In der Praxis entscheidend sind meist subjektive Erfahrungen und finanzielle Möglichkeiten.
Grundlagen
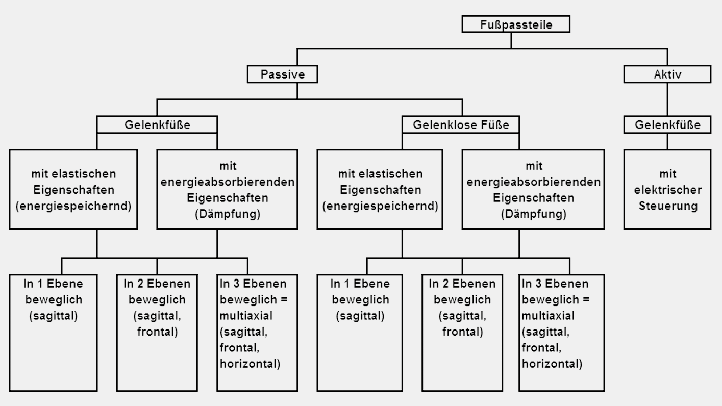
Prothesenfüße unterteilen sich grundsätzlich in aktive und passive, wobei passive weiter unterteilt werden in (Abb. 1) 2:
gelenklose
- SACH (Solid Ankle Cushion(ed) Heel),
- SAFE (Solid Ankle Flexible Endoskeleton);
gelenkige
- Gelenkfüße, die mindestens über ein mechanisches Gelenk verfügen.
Nach Blumentritt, Fitzlaff und Heim muss jeder Prothesenfuß allgemein folgende biomechanische Funktionen erfüllen 3 4:
- Aufnahme des Körpergewichtes,
- Wiederherstellung der Unterstützungsfläche,
- Kraftübertragung zwischen Boden und Körper,
- Momentenerzeugung für die Fortbewegung,
- Stoßdämpfung beim Fersenauftritt,
- kosmetischer Ersatz.
Über die unterschiedlichen Krafteinwirkungen auf den Prothesenfuß in der Standphase, einer Phase des Gangzyklus 5, kommt es zur reversiblen Verformung an Fersen‑, Mittel- und Vorfuß. Daraus ergeben sich mehrere Möglichkeiten. In der Phase der Lastübernahme wird das Körpergewicht auf den Prothesenfuß übertragen. Die Wahl der Hebellänge und die Härte der Fersenmaterialien entscheiden hierbei über die Höhe der Stoßminimierung, der wirkenden Drehmomente und idealerweise über eine kontrollierte Plantarflexionsbewegung. In der mittleren Standphase sorgt der Prothesenfuß für die notwendige Stabilisierung der Körpers. Am Ende der mittleren und terminalen Standphase mit Übergang zur Vorschwung-Phase wandert der Körperschwerpunkt zurück auf die kontralaterale Seite. Die Konstruktion der Vorfußmaterialien und der mechanischen Gelenkkonstruktionen beeinflusst dabei die Länge des Schrittes sowie die Vorwärtsdynamik der Schwungphaseneinleitung 6 7 8 9 10 11 12 13.
Seit den 1980er Jahren schreitet die Entwicklung von Prothesenfußpassteilen durch neue Materialforschungsergebnisse stetig voran. Die Implementierung von Kohlefaserverbundstoffen in der Orthopädie-Technik schafft konstruktiv neue Möglichkeiten, Prothesenfußpassteile dynamischer, leistungsfähiger und leichter zu gestalten. Für den statischen Aufbau von Unterschenkelprothesen mit passiven Prothesenfüßen wurde durch Blumentritt et al. 1999 eine generelle Methode (Orientierung des Prothesenfußes im Raum) entwickelt, um eine „physiologische” Abrollung und Belastung für Unterschenkelamputierte zu gewährleisten 14 15 16. Postema et al. zeigten, dass die Dorsalextensionsstellung des Fußes die Gleichgewichtskontrollmechanismen der Amputierten beeinflusst 17 18. Cortes versuchte, den Wendepunkt von der Dorsalextension zur Plantarflexion verschiedenen Prothesenfüßen zuzuordnen 19.
Andere Wissenschaftler untersuchten die energierückgebenden Eigenschaften verschiedener Prothesenfußtypen. Sie konnten darstellen, dass eine Energierückgabe zu Beginn der Standphase und in der Vorschwungphase stattfindet. Die Höhe der Energierückgabe hängt aber von der Flexibilität der gewählten Prothesenfußmaterialien und von individuellen Gangmustern ab 20 21 22 23. Eine Auswertung der Ergebnisse früherer Studien durch Rietman et al. (2002) zeigte, dass es durchaus Untersuchungen bezüglich der Adaptionsstrategien des Körpers, des Einflusses verschiedener Prothesenfüße, des Einflusses des Gewichtes auf das Gehverhalten und des Energieverbrauchs gibt 24. Diese Ergebnisse werden jedoch selten für praxisbezogene Entscheidungen durch Ärzte und Handwerker genutzt 25. Daher ist eine standardisierte Methodik zur Übertragung wissenschaftlicher Erkenntnisse in die handwerkliche Praxis dringend erforderlich.
Fragestellung
Die in dieser Pilotstudie angewandte instrumentelle Ganganalyse in Kombination mit dem erweiterten Roll-over-Shape-Verfahren (ROS) soll im Folgenden analysiert werden und mit den subjektiven Wahrnehmungen von Probanden bezüglich des Abrollverhaltens unterschiedlicher Prothesenfußpassteile verglichen werden. Dies kann erste Anhaltspunkte für eine mögliche objektivierte Messung bei der Einstellung von Unterschenkelprothesen liefern.
Die vorliegende Studie versteht sich als Einstieg in die komplexe Problematik, Prothesenfußpassteile zu analysieren, um eine klinische, wissenschaftliche und industrieunabhängige Funktionsbeschreibung zu erarbeiten.
Material und Methode
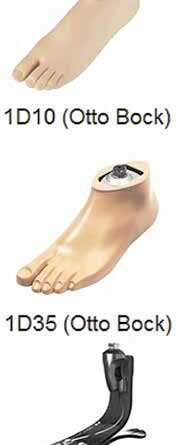
Das Studiendesign basiert auf dem Vergleich von vier einseitig unterschenkelamputierten Probanden mit drei baulich unterschiedlichen gelenklosen Prothesenfußpassteilen (Abb. 1), die unabhängig von der Probandenversorgung ausgewählt wurden. Einschlusskriterien waren eine uneingeschränkte Gehfähigkeit ohne die Notwendigkeit zusätzlicher Hilfsmittel, keine Stumpfprobleme in den letzten sechs Monaten, keine Beeinträchtigungen im Rumpf und an der kontralateralen Beinseite. Darüber hinaus mussten die Prothesenträger kognitiv fähig sein, sich an unterschiedliche Prothesenfußpassteile zu adaptieren. Die für diese Studie gewonnenen Probanden ℗ gehörten alle der AK3 an und waren zwischen 38 und 67 Jahre alt. Die Amputationsdauer lag zwischen 3 und 46 Jahren, die Stumpflängen betrugen zwischen 8 und 24 cm, und das jeweilige Körpergewicht betrug 92 kg (P1), 118 kg (P2), 100 kg (P3) und 72 kg (P4).
Die ausgewählten Prothesenfußtypen (Abb. 2) bestanden aus einem SACH-Fuß mit Holzkern (1D10 der Firma Ottobock), einem SAFE-Fuß mit einer eingeschäumten Carbonfederkomponente (1D35 der Firma Ottobock) und einem SAFE-Fuß mit freiliegenden Carbonfederkomponenten (Vari-Flex mit EVO der Firma Össur Europe).
Ausgewertet wurden die Messdaten der Ergebnisse des Prüfauftrages 12 der Klinischen Prüfstelle für orthopädische Hilfsmittel. Dabei werden die anthropometrischen Daten und die ärztliche Eingangsuntersuchung gemäß einem standardisierten Prüfprotokoll durch einen Facharzt für Orthopädie erhoben. Die orthopädietechnische Befunderhebung wurde durch einen Orthopädie-Technikermeister gewährleistet. Das Messprotokoll beinhaltete klinisch-biomechanische Messungen mit einem VICON-Kistler-Messsystem (V460 VICON-Kameras, Kistler-Kraftmessplatten Typ 9286AA) und einem daran anschließenden Fragebogen für das jeweilige Fußpassteil im Schulnotensystem.
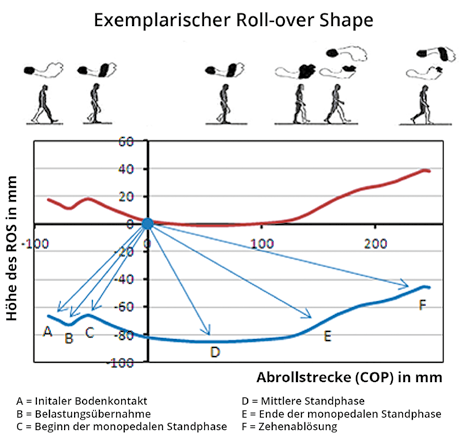
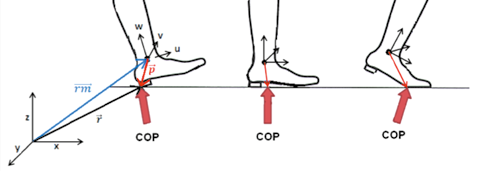
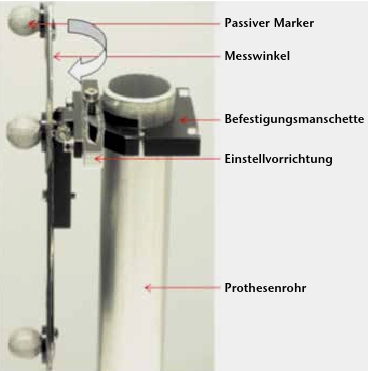
Für die Datenanalyse wurde das ROS-Verfahren von Hansen (siehe Informationskasten) verwendet und auf die gesamte Standphase erweitert, das heißt vom Fersenauftritt bis zur Zehenablösung (Abb. 3) 26. Beim ROS-Verfahren wird der Bezugspunkt der Betrachtung verändert, und zwar vom globalen (ortsfesten) in ein lokales (körperfestes) Koordinatensystem. Die jeweilige Lage des Center of Pressure (COP) wird auf das neue (körperfeste) Koordinatensystem umgerechnet (Abb. 4). Bei der Messung muss dazu ein Referenzkörper 27 an der Prothese angebracht sein. An diesem Referenzkörper (Abb. 5) befinden sich drei Marker – orthogonal positioniert –, mit denen das lokale Koordinatensystem definiert wird.
Der Messwinkel muss in den drei Hauptebenen justiert werden (Abb. 5 u. 6). Der Verlauf des COP von der Ferse zur Fußspitze kann so auf den Fuß selber (lokal) bezogen und nicht nur im Raum (global) beschrieben werden.
Zur Justierung des ROS-Referenzkörpers wurde das L.A.S.A.R.-Posture verwendet. Das neue Bezugssystem ermöglicht es, die Verformungen des Prothesenfußes unter der Abrollbelastung objektiv zu beschreiben.
Andere Messverfahren, mit denen man Prothesenfüße in der Abrollbelastung untersucht, messen auftretende Kräfte oder Formveränderungen bestimmter Punkte am Prothesenfuß. Mit dem erweiterten ROS-Messverfahren wird dagegen die belastungsabhängige Verformung am jeweiligen Lasttragepunkt erfasst, der unter dem Fuß durchläuft. Diese Kennlinie spiegelt charakteristische Eigenschaften verschiedener Prothesenfüße wider.
Für eine verbesserte Darstellung wurde dieser ROS-Verlauf um den vertikalen Abstand des Bezugspunkts im Zweibeinstand höhenverschoben. Um Aussagen über die Adaptionszeiten der gewählten Prothesenfüße zu erzielen, wurden bei Proband 1 Doppelmessungen durchgeführt. Diese fanden nach einer zweistündigen Adaptionszeit sowie nach einer fünftägigen Tragezeit statt. Die Ergebnisse zeigten nach mehrtägiger Anwendung nur geringfügige Unterschiede. Die Hüft- und Kniewinkel verliefen tendenziell symmetrischer, die Standardabweichungen wurden geringfügig kleiner. Aufgrund dieser Erkenntnisse wurde bei allen weiteren Untersuchungen eine Adaptionszeit von 2 Stunden als ausreichend angenommen 28.
Ergebnisse
Die Erwartungen der Probanden an ihren Prothesenfuß bezüglich Funktion und Design waren sehr unterschiedlich. Sie erwarteten von einem Prothesenfuß im Hinblick auf seine Funktion, dass er sich dem Boden gut anpasst, ein geringes Gewicht besitzt und eine gute Abrollung bietet. Das Design sollte ein natürliches Aussehen gewährleisten.
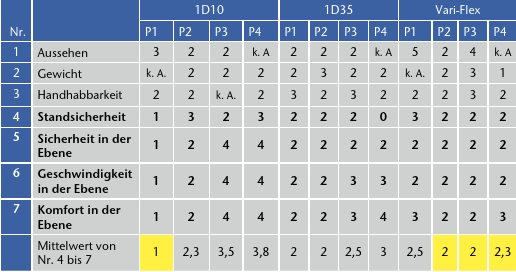
Die Auswertung der subjektiven Bewertungen der verschiedenen Prothesenfußpassteile ergab, dass die Probanden 2 und 4 sich eindeutig für den Vari-Flex-Fuß entschieden (Tab. 1). Bei den Probanden 1 und 3 lagen die subjektiven Einschätzungen der verschiedenen Prothesenfüße sehr dicht beieinander. Proband 1 favorisierte den 1D10 durch das leichte Überrollen über den Vorfuß, Proband 3 sah geringe Vorteile beim Vari-Flex.
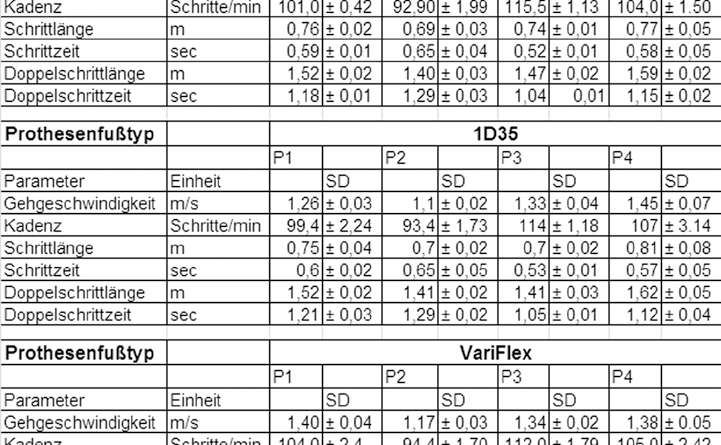
Die Ergebnisse der instrumentellen Ganguntersuchung zeigten bei den Probanden 2, 3 und 4 die größte Kongruenz zur erhaltenen Seite mit dem Vari-Flex, bei Proband 1 war diesbezüglich der 1D10 am besten. Bei den kinematischen Ergebnissen waren die Resultate mit dem Vari-Flex bei den Probanden 1 und 2 besser gegenüber 1D10 und 1D35 (Tab. 2). Vor allem bei der selbst gewählten Gehgeschwindigkeit erhöhten sich die Werte um mehr als 5 %. Bei den Probanden 3 und 4 wurden nur geringfügige Unterschiede in Bezug auf Gehgeschwindigkeit und Schrittlänge deutlich, Proband 3 zeigte leichte Vorteile mit dem 1D10, Proband 4 mit dem 1D35.
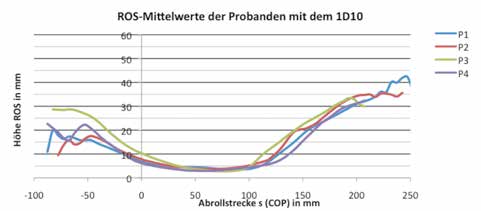
Bei der qualitativen Betrachtung der mittleren ROS-Verläufe des 1D10 (Abb. 7) zeigten sich deutliche interindividuelle Unterschiede in der Belastungsübernahme und zu Beginn der mittleren Standphase, die sich ab der Hälfte der Standphase wieder anglichen. Diese Abweichungen traten auch intraindividuell auf und zeigten hohe Standardabweichungen von bis zu 8,5 mm in der ersten Phase der Standphase. Die Fersenmaterialien des 1D10 wurden bis zu 13 mm unterschiedlich stark verformt. Die Angleichung der Verformungsunterschiede fand in der Mitte der mittleren Standphase statt. Die Abrolllängen über den Vorfußbereich bis zum Fersenauftritt der kontralateralen Beinseite waren zwischen den Probanden unterschiedlich: Proband 1 beendete den Abrollvorgang nach 143 mm Abrollstrecke, Proband 2 nach 138 mm, Proband 3 nach 133 mm; Proband 4 rollte mit einer Abrolllänge von 148 mm am weitesten über den Vorfuß ab. In der bipedalen Standphase stiegen die Standardabweichungen der Probanden 1 und 2 auf maximal 4,5 mm.
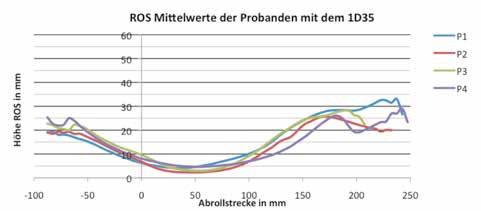
Die mittleren ROS-Verläufe des 1D35 (Abb. 8) zeigten homogene und reliable Formveränderungen bis zur terminalen Standphase. Ab dem Ende der terminalen Standphase und Vor-Schwungphase verläuft der Kraftangriffspunkt ausschließlich im Vorfußbereich; dort nahmen die Unterschiede signifikant zu. Das führt dazu, dass die Probanden 2 und 4 einen größeren Hebelarm zur Verformung des Vorfußbereiches benötigen, um die Abrollung einzuleiten. Die Abrolllängen bei diesen Probanden lagen bei 156 mm der Abrollstrecke; die Probanden 1 und 3 beendeten den Schritt schon bei 131 mm. Ab einer Abrolllänge von 175 mm stiegen die intraindividuellen Standardabweichungen stark an – bis zu einem Maximum von 10 mm. Nur Proband 2 konnte gut reproduzierbare Abrollvorgänge erzielen. Dessen Standardabweichungen lagen über die gesamte Standphase unter 2 mm.
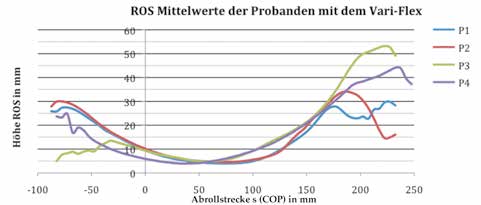
Die mittleren ROS-Verläufe des Vari-Flex-Prothesenfußes (Abb. 9) verhielten sich zweigeteilt. Über einen Großteil der Standphase erreichten Proband 1 und 2 fast identische Abrollveränderungen, obwohl die Probandengewichtsunterschiede über 20 kg betrugen. Die Probanden 3 und 4 erzielten unterschiedliche Materialverformungen zu Beginn der Standphase, die sich in der monopedalen Standphase identisch anglichen. Alle Probanden zeigten sehr reliable Abrollverhalten über mehrere Einzelmessdurchläufe. Nur bei den Probanden 1 und 3 stiegen die Standardabweichungen zum späten Ende der Standphase leicht an – auf maximal 5,4 mm; bei Proband 4 kam es zu Beginn der Belastungsübernahme zu einer Streuung von 4,1 mm.
Bei der Betrachtung, wie lange die Probanden mit dem Vari-Flex-Fuß über den Vorfuß abrollen, wurden bei 3 von 4 Probanden ähnliche Abrolllängen festgestellt. Proband 1 schloss die monopedale Standphase nach einem Abrollweg von 163 mm ab, Proband 2 nach 176 mm und Proband 4 nach 170 mm. Proband 3 verblieb am längsten auf dem Prothesenfuß. Er erreichte eine Abrollstrecke von 193 mm. In der bipedalen Standphase verhielten sich die ROS-Verläufe individuell. Die Probanden 3 und 4 versuchten weit über den Vorfuß abzurollen, die anderen beiden Probanden brachen den Abrollvorgang nach Beendigung der monopedalen Standphase ab.
Diskussion
Die Analyse von Prothesenfußpassteilen ist vielschichtig und beinhaltet die Auseinandersetzung mit individuellen Einflussgrößen, die jeder einzelne Amputierte mit sich bringt. Einheitliche, praxisrelevante und industrieunabhängige Versorgungskriterien sind daher nur schwer zu erarbeiten. Die biomechanische Analyse zeigte, dass die subjektive Bewertung verschiedener Prothesenfußpassteile nicht immer mit deren objektiven Daten übereinstimmt oder dass die klaren objektiven Verbesserungen nicht gleichermaßen von den Anwendern empfunden werden. Das angewandte Roll-over-Shape-Verfahren bietet die Möglichkeit, die subjektiv wahrgenommenen Abrollunterschiede sichtbar zu machen. Die Probanden dieser Studie beschrieben das Abrollverhalten des 1D10 als „zweibuckelig” oder als „Doppelschlag”. Dies spiegelte sich in zwei Veränderungen der Abrollradien bei 25 mm und bei 125 mm der Abrollstrecke wider. Die Begründung findet sich in der unterschiedlichen Materialzusammensetzung zwischen dem weichen Fersen- und Vorfußbereich im Verhältnis zum rigiden Mittelfußbereich. Die Betrachtungen des effektiven Hebelarmes, der die Schrittweite bis zum Aufsetzen der kontralateralen Seite beeinflusst, zeigten, dass dieser gegenüber dem 1D35 und dem Vari-Flex-Prothesenfuß mit durchschnittlich 140 mm Abrollstrecke verkürzt war. Trotz dieser kurzen Schrittlänge rollten alle Probanden sehr weit über den Vorfuß ab. Subjektiv beschrieben zwei Probanden diese Verformung als „weiche” Abrollung.
Diese Abrollmöglichkeit eröffnet Amputierten mit einer geringeren Mobilität die Möglichkeit, größere Hüftextensionswinkel zu erreichen. Untersuchungen von Bonnet zu einem ähnlich konstruierten Fuß (Gery-Fuß) bestätigen diese Erkenntnisse 29. Die ROS-Verläufe zeigten weiterhin, dass gleiche Verformungen in der Abrollgeometrie mit dem 1D10 unabhängig von Gehgeschwindigkeit und Körpergewicht auftraten. Auch diese Ergebnisse können durch Untersuchungen von A. H. Hanson bestätigt werden 30 31. Bei der Analyse der ROS-Verläufe mit dem 1D35 zeigte sich eine gute Reliabilität unabhängig von Körpergewicht und Gehgeschwindigkeit bis zur Vorschwung-Phase im zweiten bipedalen Standphasenanteil. In diesem Standphasenabschnitt wird ausschließlich der Zehenanteil verformt. Da die Carbonfaserstärke des 1D35 nicht individuell vom Gewicht des Unterschenkelamputierten abhängt und die Carbonfaserlänge proportional zur Fußlänge konstruiert wird, reagieren die Probanden unterschiedlich auf die Widerstandskräfte im Vorfußbereich. Zwei Probanden beendeten den Abrollvorgang, die anderen zwei versuchten über die verbliebene Rückstellkraft weiter abzurollen. Nur Proband 4 war in der Lage, diese Abrollveränderung subjektiv zu beschreiben. Das zeigt, dass dieses Verfahren in der Lage ist, subjektive Wahrnehmungen zu objektivieren und darüber hinaus nicht immer empfundene Abrolländerungen messbar zu machen.
Auffällig beim 1D35 sind die Verformungen im Fersenbereich. Dort wurde eine ROS-Höhe von durchschnittlich 20 mm erreicht, die im Schnitt 3 mm höher als beim 1D10 ausfiel, obwohl die Fersenmaterialien weicher erscheinen.
Die mittleren ROS-Verläufe mit dem Vari-Flex-Prothesenfuß zeigten interindividuell unterschiedliches Verformungsverhalten bei intraindividuell sehr geringer Variabilität. Proband 3 erzielte die geringste Verformung zu Beginn und die höchste Deformation am Ende der Standphase. Nach der Analyse des ROS müsste die Härte der gewählten Fersencarbonfeder verändert werden, um diesem Probanden einen weicheren Fersenauftritt zu ermöglichen. Diese Beobachtung korreliert jedoch nicht mit der Aussage des Probanden.
Die Ergebnisse des ROS-Verlaufs in der Mitte der mittleren Standphase zeigten im Vergleich zu den anderen Prothesenfußpassteilen je zwei gleichbleibende Abrollradien, die mit dem Körpergewicht der Probanden korrelieren, obwohl die Carbonfaserstärken nach der Aktivitätsklasse und dem Körpergewicht des Probanden ausgewählt wurden. Alle Probanden erzielten jedoch mit dem Vari-Flex-Fuß den längsten effektiven Hebelarm mit im Durchschnitt 175,5 mm Abrolllänge, bevor sie die monopedale Standphase beendeten. Somit können Zusammenhänge zwischen der Länge der Carbonfeder und dem effektiven Hebelarm ermittelt werden.
Schlussfolgerungen
Diese Pilotstudie an vier unterschenkelamputierten Probanden versuchte mithilfe der instrumentellen Ganganalyse und dem erweiterten Roll-over-Shape-Verfahren die subjektiven Wahrnehmungen im Abrollverhalten verschiedener Prothesenfußpassteile zu objektivieren. Das ROS-Verfahren hat sich als geeignet erwiesen, objektiv die Verformungen eines Prothesenfußpassteiles unter der tatsächlichen (in vivo) Belastung aufzuzeichnen. Dadurch konnten auch von sensiblen Prothesenträgern erfühlte Abrolleigenschaften objektiv nachvollzogen werden. Die Genauigkeit des ROS-Verfahrens ist dabei der klinischen Beobachtung überlegen. Die gewonnenen Erkenntnisse reichen allerdings noch nicht aus, um generelle Aussagen über die individuelle Auswahl eines geeigneten Prothesenfußes zu treffen. Dazu bedarf es weiterer Messungen mit einer größeren Probandenanzahl.
Der Autor:
Markus Hildebrandt
Klinische Prüfstelle für Orthopädische Hilfsmittel
Albert-Schweitzer-Campus 1
48149 Münster
markushildebrandt@gmail.com
Begutachteter Artikel/reviewed paper
Hildebrandt M. Intraindividuelle Vergleichsuntersuchung verschiedener Fußpassteile an unterschenkelamputierten Probanden. Orthopädie Technik, 2014; 65 (1): 34–42
Erklärung des Roll-over-Shape-Verfahrens
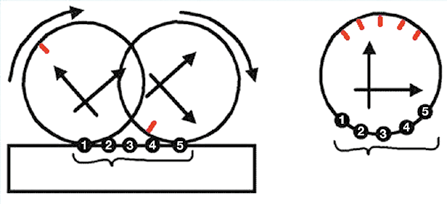
Das Roll-over-Shape-Verfahren (ROS), entwickelt von A. H. Hansen (2002), ist von ihm definiert als reproduzierbare Abrollgeometrie, die mithilfe der Koordinatentransformation den Kraftangriffspunktverlauf (COP) auf ein körperfestes Koordinatensystem bezieht und vom ipsilateralen bis zum kontralateralen Fersenkontakt beschrieben wird 32. Über das ROS-Verfahren ist es möglich, qualitativ eine Formgestaltung zu beschreiben. Zur Veranschaulichung können bekannte Geometrieformen wie zum Beispiel ein Fahrradreifen mit Ventil verwendet werden. Bei der seitlichen Betrachtung eines fahrenden Radfahrers bewegt sich das Ventil auf und ab (Abb. 2a). Schaut man jedoch von der Fahrradnabe auf das Ventil, kreist es um die Nabe und spiegelt die Abrollgeometrie (ein Kreis) wider.
In Bezug auf eine Untersuchung von Prothesenfüßen heißt dies, dass die von außen auf den Prothesenfuß bezogene Betrachtung zu einem fixen Punkt in Höhe des Malleolus lateralis der erhaltenen Seite wechselt. Über den ROS können somit die unterschiedlichen Verformungen der Prothesenfußmaterialien dargestellt werden 33 34 35 36.

- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Konservative Versorgung einer adulten Skoliose mit einem modularen Bausatz – ein Versorgungsbeispiel — 6. März 2026
- Perry J, Burnfield JM. GAIT Analysis – Normal and Pathological Function. Thorofare, NJ, USA: Slack Inc., 2010, 2nd edition
- Bundesfachschule für Orthopädie-Technik, Sibbel B, Seminarunterlagen Prothetik. Dortmund, 2009
- Blumentritt S, Scherer HW, Wellershaus U. Biomechanisch-ganganalytische Bewertung von Prothesenfüßen. Medizinisch-Orthopädische Technik, 1994; 114: 287–292
- Hansen AH. Roll-over characteristics of human walking with applications for artificial limbs. PhD Thesis, Northwestern University. Chicago, 2002
- Postema K, Hermens HJ, de Vries J, Koopman HF, Eisma WH. Energy storage and release of prosthetic feet Part 1: Biomechanical analysis related to user benefits. Prosthetics and Orthotics International, 1997; 21 (1): 17–27
- Hansen AH. Roll-over characteristics of human walking with applications for artificial limbs. PhD Thesis, Northwestern University. Chicago, 2002
- Blumentritt S, Schmalz T, Jarasch R, Schneider M. Effects of sagittal plane prosthetic alignment on standing trans-tibial amputee knee loads. Prosthetic and Orthotics Int., 1999; 23 (3): 231–238
- Collins SH, KUO, AD. Recycling Energy to Restore Impaired Ankle Function during Human Walking. doi:10.1371/journal. pone.0009307, PLoS ONE, 2010; 5 (2): e9307
- Hansen AH, Meier MR, Sam M, Childress DS, Edwards ML. Alignment of trans-tibial prostheses based on roll-over shape principles. Prosthetics and Orthotics Int., 2003; 27 (2): 89–99
- Hansen AH, Sam H, Childress DS. The Effective Foot Length Ratio: A Potential Tool for Characterization and Evaluation of Prosthetic Feet. Journal of Prosthetics & Orthotics, 2004; 16 (2): 41–45
- Hansen AH, Childress DS, Knox EH. Roll-over shapes of human locomotor systems: effects of walking speed. Clinical Biomechanics, 2004; 19 (4): 407–414
- Hansen AH. Effects of alignment on the roll-over shapes of prosthetic feet, Prosthetics and Orthotics Int., 2008; 32 (4): 390–402
- Hansen AH, Childress DS. Investigations of roll-over shape: implications for design, alignment, and evaluation of ankle-foot prostheses and orthoses. Disability & Rehabilitation, 2010; 32 (26): 2201–2209
- Blumentritt S, Schmalz T, Jarasch R, Schneider M. Effects of sagittal plane prosthetic alignment on standing trans-tibial amputee knee loads. Prosthetic and Orthotics Int., 1999; 23 (3): 231–238
- Blumentritt S. A new biomechanical method for determination of static prosthetic alignment. Prosthetic and Orthotics Int., 1997; 21: 107–113
- Blumentritt S, Schmalz T, Jarasch R. Die Bedeutung des statischen Prothesenaufbaus für das Stehen und Gehen des Unterschenkelamputierten. Der Orthopäde, 2001; 30 (3): 161–168
- Postema K, Hermens HJ, de Vries J, Koopman HF, Eisma WH. Energy storage and release of prosthetic feet Part 2: Subjective ratings of 2 energy storing and 2 conventional feet, user choice of foot and deciding factor. Prosthetics and Orthotics International, 1997; 21 (1): 28–34
- Rietman JS, Postema K, Geertzen JH. Gait analysis in prosthetics: Opinions, ideas and conclusions. Prosthetic and Orthotics Int., [vs. International] 2002; 26 (1): 50–57
- Collins SH, KUO, AD. Recycling Energy to Restore Impaired Ankle Function during Human Walking. doi:10.1371/journal. pone.0009307, PLoS ONE, 2010; 5 (2): e9307
- Bonnet X, de la Torre M, Bouchard C, Deboissy F, Mille J. Studie zur Optimierung des Abrollverhaltens bei Amputierten mit geringem Aktivitätsgrad. Orthopädie Technik, 2011; 52 (5): 351–355
- Fey NP, Klute GK, Neptune RR. The influence of energy storage and return foot stiffness on walking mechanics and muscle activity in below-knee amputees. Clinical Biomechanics, 2011; 26 (10): 1025–1032
- Fitzlaff G, Heim S. Passteile für Prothesen der unteren Extremitäten. Dortmund: Orthopädie Technik, 2002; 53
- Zahedi S, Harris G, Smart C, Evans A, McCarthy J, Ross J. Design of Prosthetic Feet. Orthopädie Technik Quarterly, English edition, 2007; 3: 4–14
- Wulff W, Kraft M. Entwicklung eines Gangsimulators für Beinprothesen. Orthopädie Technik, 2009; 3: 310–318
- Perry J, Burnfield JM. GAIT Analysis – Normal and Pathological Function. Thorofare, NJ, USA: Slack Inc., 2010, 2nd edition
- Klinische Prüfstelle für orthopädische Hilfsmittel der technischen Orthopädie am Universitätsklinikum [Münster]. Klassifikation von Fußpassteilen und deren Zuordnung zu Indikationsgruppen; Teil 1: Intraindividuelle Vergleichsuntersuchung an exemplarischen Fußpassteilen an unterschenkelamputierten Probanden, Interner Prüfbericht, Münster, 2011
- Hildebrandt M. Aufbau und Test eines Messsystems zum Vergleich von Prothesenfußpassteilen auf der Grundlage des Roll-over Shape-Verfahrens. Gießen: Diplomarbeit an der THM, 2012
- Zahedi S, Harris G, Smart C, Evans A, McCarthy J, Ross J. Design of Prosthetic Feet. Orthopädie Technik Quarterly, English edition, 2007; 3: 4–14
- Bonnet X, de la Torre M, Bouchard C, Deboissy F, Mille J. Studie zur Optimierung des Abrollverhaltens bei Amputierten mit geringem Aktivitätsgrad. Orthopädie Technik, 2011; 52 (5): 351–355
- Hansen AH, Childress DS, Knox EH. Roll-over shapes of human locomotor systems: effects of walking speed. Clinical Biomechanics, 2004; 19 (4): 407–414
- Hansen AH, Meier MR, Sessoms PH, Childress DS. The effects of prosthetic foot roll-over shape arc length on the gait of trans-tibial prosthesis users. Prosthetics and Orthotics Int., 2006; 30 (3): 286–299
- Fitzlaff G, Heim S. Passteile für Prothesen der unteren Extremitäten. Dortmund: Orthopädie Technik, 2002; 53
- Hansen AH. Roll-over characteristics of human walking with applications for artificial limbs. PhD Thesis, Northwestern University. Chicago, 2002
- Hansen AH, Meier MR, Sam M, Childress DS, Edwards ML. Alignment of trans-tibial prostheses based on roll-over shape principles. Prosthetics and Orthotics Int., 2003; 27 (2): 89–99
- Hansen AH, Sam H, Childress DS. The Effective Foot Length Ratio: A Potential Tool for Characterization and Evaluation of Prosthetic Feet. Journal of Prosthetics & Orthotics, 2004; 16 (2): 41–45
- Hansen AH, Childress DS, Knox EH. Prosthetic foot roll-over shapes with implications for alignment of trans-tibial prostheses. Prosthetics and Orthotics Int., 2000; 24 (3), 205–215