Einleitung
Die Ruhigstellung von Fuß und Sprunggelenk spielt in der Therapie von Verletzungen der unteren Extremität wie Frakturen oder Bandläsionen, bei postoperativen Zuständen bspw. nach Arthrodesen, bei chronischen Pathologien wie Knochenmarködemen des Talus und des Calcaneus sowie in der Charcot-Arthropathie eine wichtige Rolle. Ziel dieser Ruhigstellung ist es, den an den Gelenken von Fuß und Sprunggelenk wirkenden Drehmomenten und Kräften in allen drei Bewegungsebenen entgegenzuwirken, um die entsprechenden Strukturen zu entlasten. Traditionell wird diese Ruhigstellung durch die Versorgung mit zirkulären Gipsen oder Gipsschienen erreicht. In den letzten Jahren gewinnen allerdings sogenannte Walker zunehmend an Bedeutung 1 2 3 4. Vorteil der Walker ist die rasche Anpassung (und damit eine Zeit- bzw. Kostenersparnis im Vergleich zur Gipsanlage) sowie die Möglichkeit, die Walker zur Beurteilung der Weichteile, zur Körperpflege oder zur stadienadaptierten Physiotherapie temporär und ohne großen Aufwand zu entfernen. Durch die Möglichkeit der Adaptation der Passform mittels Vakuum o. Ä. bieten Walker zudem die Möglichkeit einer immer neuen Anpassung, um bspw. dem Rückgang der Weichteilschwellung im Verlauf Rechnung zu tragen, was den stabilisierenden Effekt und den Patientenkomfort steigert 5 6 7. Entsprechend wird die Therapie mittels Walker bei den oben genannten Indikationen auch in der Literatur immer häufiger diskutiert, wobei jedoch „Walker“ als homogene Entität behandelt werden. Tatsächlich gibt es aber unzählige verschiedene Modelle, auch wenn sie in der Praxis als gleichartig wahrgenommen werden. Gegenstand der vorliegenden Untersuchung an drei gängigen Walker-Modellen ist eine Evaluation folgender Aspekte:
- eine Untersuchung der mechanischen Eigenschaften der Walkerschäfte bei der Einleitung externer Drehmomente und Kräfte in allen drei Raumachsen,
- die Ermittlung der biomechanischen Auswirkungen der Walker auf Kinematik und Kinetik am Sprunggelenk und partiell auch am Kniegelenk bei alltäglicher Belastung unter Standardbedingungen,
- die Untersuchung der Restbeweglichkeit im Sprunggelenk in allen drei Ebenen als Marker zur Ruhigstellung bei den unterschiedlichen Modellen sowie
- eine Bewertung von Stabilitätsgefühl und Tragekomfort durch die Probanden.
Zu berücksichtigen ist dabei, dass die Kontrolle der Compliance der Patienten durch die Möglichkeit der selbstständigen Entfernung der Walker-Orthese durch die Patienten erschwert wird.
Material und Methoden
Acht gesunde Probanden (3 Frauen, 5 Männer) im Alter von 29 bis 66 Jahren wurden nach Zustimmung durch die zuständige Ethikkommission (Ethikkommission der Deutschen Sporthochschule Köln, Projekt Nr. 159/2018) für die vorliegende Pilot-Untersuchung rekrutiert und nach schriftlichem „informed consent“ eingeschlossen. Für die Untersuchung standen drei Walker in jeweils drei unterschiedlichen Größen zur Verfügung:
- „Aircast AirSelect Elite“ (Ormed Gmbh A DJO Company) (Abb. 1a),
- „Vacoped“ (Oped GmbH) (Abb. 1b) und
- „Rebound Air Walker“ (Össur Deutschland GmbH) (Abb. 1c).
Zwei erfahrene Orthopädietechniker passten die Walker den Probanden vor Ort individuell gemäß den Vorgaben der Hersteller mit rigider Sprunggelenksfixierung bei 0° an. Es wurde jeweils das rechte Bein versorgt; das linke Bein blieb bei allen Tests ohne Walker, die Beinlänge wurde mittels Einlage angepasst. Die Untersuchungsreihenfolge der einzelnen Walker sowie die Abfolge der Bewegungsmuster wurden randomisiert. Als alltägliche Bewegungsmuster wurden die folgenden untersucht:
- das Gehen auf ebenem Grund auf einer Gehstrecke über 15 Meter,
- das Treppensteigen über zwei Stufen,
- das Treppabsteigen über zwei Stufen sowie
- beidbeinige Kniebeugen („0.5 squat“).
Der Gang auf ebenem Untergrund erfolgte mit selbstgewählter, aber für die verschiedenen Orthesenbedingungen konstanter Gehgeschwindigkeit. Die Gehgeschwindigkeit wurde mittels Doppellichtschranken kontrolliert und an den Probanden zurückgemeldet. Die hinauf- und hinabzusteigende Treppe hatte eine Stufenhöhe von 21 cm und eine Stufentiefe von 30 cm. Die beidbeinigen Kniebeugen erfolgten im Eigenrhythmus bei maximalen Kniebeugewinkeln von ca. 60°. Für die biomechanische Untersuchung wurden retroreflektierende Marker auf der Körperoberfläche respektive der anterioren Auflage des Walkerschafts und des Walkerfußteils aufgebracht. Zur Standardisierung wurden die Malleolen palpiert und ihre Projektion auf der Schale der Walker markiert, zudem wurde die Cluster-Technik auf geraden Stand referenziert.
Als Standardverfahren wurde die inverse Dynamik angewendet (Ausgangspunkt: Bodenreaktionskräfte und Kraftangriffspunkt; Berechnung von externen Momenten und Gelenkkräften an Sprunggelenk, Kniegelenk und Hüftgelenk bei Berücksichtigung der linearen und rotatorischen Segmentbeschleunigungen). Es wurden jeweils die mit einem Walker versorgte sowie die Gegenseite mittels 3D-Bewegungsanalyse untersucht. Dazu standen ein Markertracking „Qualisys Track Manager“ der Firma Qualisys mit 16 optischen Kameras (à 4 Megapixeln) mit 200 Hz sowie 2 Sechs-Komponenten-Kraftmessplattformen (AMTI) zur Verfügung. So konnten Bewegungen von Fuß, Unterschenkel und Knie in hinreichender räumlicher und zeitlicher Auflösung erfasst werden. Die Genauigkeit des Messsystems ist bei den Gelenkwinkeln kleiner als 0,5° und wird durch das Mitteln von fünf Versuchswiederholungen weiter erhöht. Entsprechend wurden Bewegungsformen 10-mal wiederholt, sodass mindestens 5 valide Versuchswiederholungen pro Bedingung weiter analysiert werden konnten und insgesamt 120 dreidimensionale Bewegungs- und Belastungsanalysen für jede der drei Walker-Orthesen (insgesamt also 360 3D-Analysen) vorlagen.
Unter Verwendung der Lage der Gelenkmittelpunkte, des Kraftangriffspunktes und der dreidimensionalen Bodenreaktionskräfte wurden die resultierenden externen Drehmomente an Sprung- und Kniegelenk sowie am Walker selbst mit Hilfe eines einfachen biomechanischen Modells berechnet:
- starre Körper mit reibungsfreien 3D-Gelenken,
- Vorfuß, Mittel- und Rückfuß,
- Tibia (Unterschenkel),
- Femur (Oberschenkel),
- Becken.
Weiterhin wurden die mechanischen Eigenschaften der drei Walker im Modell respektive beim Gang analysiert. Dazu wurde ein eigens entwickeltes und evaluiertes biomechanisches Unterschenkel-Fuß-Modell mit Kugelgelenk 8 9 verwendet. Am künstlichen Unterschenkel wurde in den am Messtisch fixierten Walker horizontal zunehmend Kraft in antero-posteriorer und in medio-lateraler Richtung eingeleitet und damit am Walker ein externes Moment in sagittaler und frontaler Ebene appliziert. Die Krafteinleitung erfolgte mittels Prüfmaschine von 0 bis 200 N. Die damit erzeugten Drehmomente erreichten mit diesem Vorgehen 0 bis 70 Nm. Abhängig von den auf die Walker einwirkenden Drehmomenten wurde die Deformation der Walker mit einem optischen Bewegungsanalysesystem (Vicon, 6 Kameras MX40, 100 Hz) erfasst und die Walker-Steifigkeit bei Zunahme des Drehmoments von 0 auf 35 Nm und von 35 auf 70 Nm bestimmt. Beim Gang wurde die optische Deformation in den drei Belastungsebenen anhand entsprechender Marker bestimmt (s. o.)
Schließlich wurden die Probanden gebeten, Stabilität und Tragekomfort der verschiedenen Walker im Sinne einer Rangliste zu vergleichen. Die Untersuchung stellt damit ein kon-trolliertes randomisiertes Experiment mit einfaktoriellem Versuchsplan mit Messwiederholung – drei experimentelle Schuhbedingungen (Walker) unter drei realitätsnahen Bedingungen (Versuchswiederholungen) – dar.
Die statistische Analyse der intervallskalierten Daten erfolgte mittels Standardverfahren (SPSS oder Vergleichbares) mit einfaktorieller Varianzanalyse (ANOVA) mit Versuchswiederholung („repeated measures“) und paarweisem t‑Test mit Tukey-Kramer-Korrektur.
Die biomechanische Untersuchung wurde im Labor des IFD Cologne (Institut für Funktionelle Diagnostik Köln), die Materialuntersuchung im Materialprüflabor am Institut für Biomechanik und Orthopädie der Deutschen Sporthochschule Köln durchgeführt.
Ergebnisse
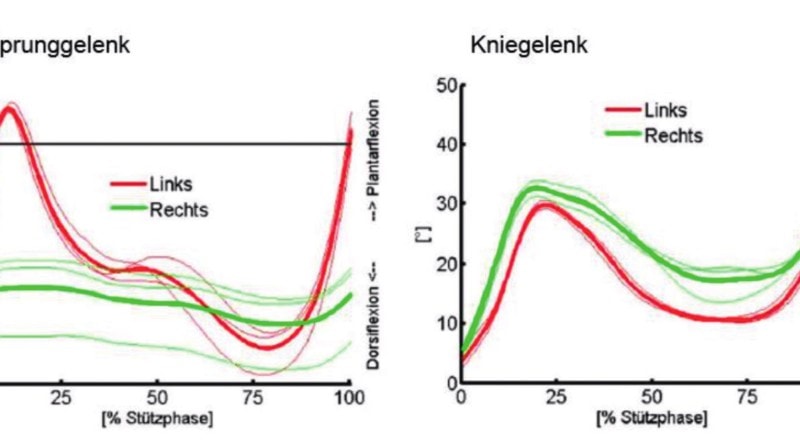
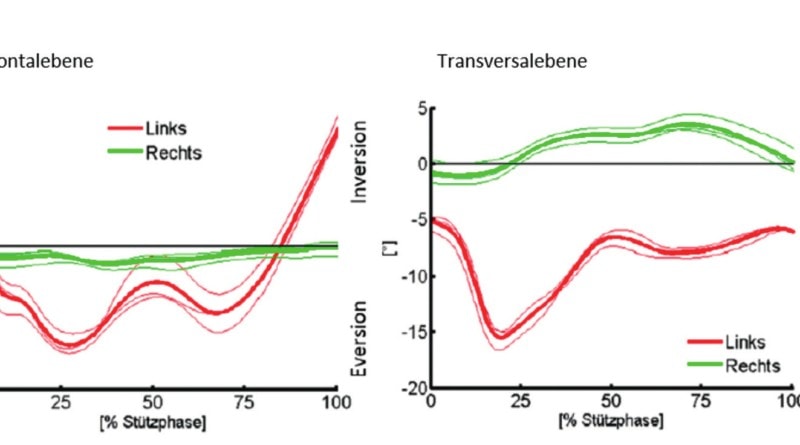
In der Sagittalebene während der Standphase (d. h. Stützphase) des normalen Gehens zeigen sich deutliche Unterschiede in der Bewegung des Sprunggelenks (Plantarflexion/Dorsalextension) und des Kniegelenks (Flexion/Extension) zwischen der freien linken und der per Walker immobilisierten rechten unteren Extremität (Abb. 2): Während die Bewegung des Sprunggelenks nachhaltig durch die Walker eingeschränkt wird, erscheint die Bewegung des Kniegelenks in der Sagittaleben nahezu unbeeinflusst. Auch in der Frontal- und Transversalebene wird die Rückfußmobilität deutlich durch die Walker-Orthesen eingeschränkt (Abb. 3). Im Vergleich der drei Walker findet sich nahezu kein Unterschied in den Sprunggelenksbewegungen des nicht versorgten kontralateralen Beines. Dagegen zeigen sich deutliche Unterschiede zwischen den Walkern an der versorgten Seite (Tab. 1), wobei der „Rebound Air Walker“ von Össur im Durchschnitt über alle Ebenen die größte Stabilität vermittelt.
In der Frontalebene (Inversion/ Eversion) zeigen alle drei Walker eine deutliche Reduktion der Gelenkbewegung. Die Walker von Össur und DJO erreichten die besten Ergebnisse im Vergleich mit Oped in Bezug auf die Bewegungseinschränkung des Sprunggelenks in der Sagittal- und Frontalebene. In Bezug auf die Transversalebene erscheint der Össur-Walker mit deutlichem Abstand am effektivsten. Bei moderater Beanspruchung – etwa bei beidbeinigen Kniebeugen – gelingt es diesem Walker am besten, in der Sagittalebene die Dorsalextension des Sprunggelenks einzuschränken und damit insbesondere die Achillessehne zu entlasten. Aber auch beim normalen Gang findet sich das größte Potenzial zur Drehmomentübernahme und damit zur Entlastung bei dieser Orthese.
Alle untersuchten Walker sind somit in der Lage, die Bewegungen des Sprunggelenks in allen drei Bewegungsebenen einzuschränken. Insgesamt zeigt jedoch der „Rebound Air Walker“ (Össur) die größten biomechanischen Effekte. Es folgt in der Wirkintensität der „Aircast AirSelect Elite“ von DJO. Dieser Walker zeichnet sich durch gute Wirksamkeit in der Frontalebene aus, zeigt aber deutliche Defizite in der Transversalebene und bei einigen Beanspruchungsformen in der Sagittalebene. Die gemessenen Stabilitätsunterschiede in der Sagittalebene mit geringster Stabilität gegen Flexions-/Extensionsbewegungen durch den Oped-Walker spiegelt sich in der Wahrnehmung der Probanden wider. Entsprechend werten 7 von 8 Probanden den Oped-Walker als am wenigsten stabil in der Sagittalebene. In der Transversalebene vermittelt der Össur-Walker die intensivste Bewegungseinschränkung, was subjektiv auch von 7 der 8 Probanden wahrgenommen wird.
Die am Rückfuß bzw. an den Walker-Orthesen wirkenden externen Drehmomente sowie das frontale externe Moment am Knie werden für die Walker-Orthese und die nicht versorgten Beine in Tabelle 2 zusammengefasst. Auch hier ist die Aufnahme externer Momente in allen Ebenen durch den „Rebound Air Walker“ im Durchschnitt am größten, ohne die Gelenke der Gegenseite oder das ipsilaterale Kniegelenk signifikant mehr zu belasten. Die Messdaten beim Treppengang (treppauf wie treppab) entsprechen den Daten beim Gang in der Ebene. Auch bei den beidbeinigen Kniebeugen („0.5 squat“) entsprechen Gelenkausschläge und Bewegungsumfänge denen des Gehens auf ebenem Boden.
Materialprüfung
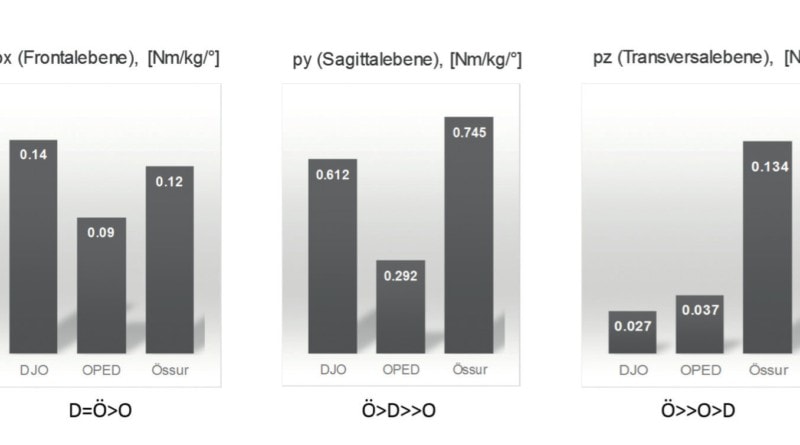
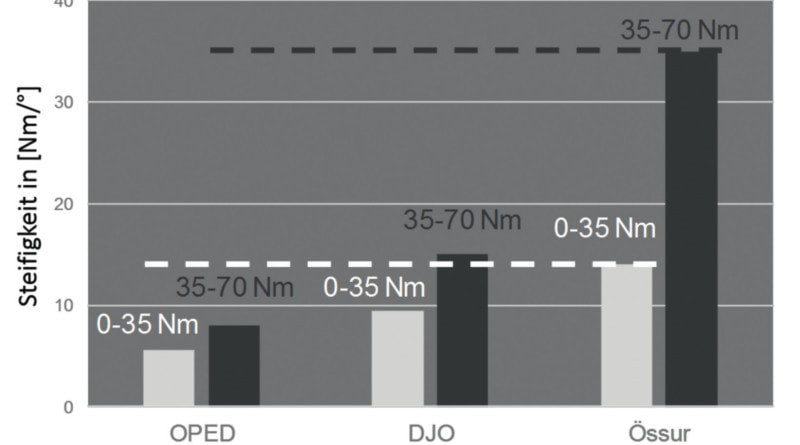
Aus der Korrelation der externen Momente mit der Restbeweglichkeit im Rückfuß resultiert die dynamische Steifigkeit der Walkerschäfte in vivo in den unterschiedlichen Ebenen (Abb. 4). Auch bei den Messungen am Modell zeigen sich deutliche Unterschiede bei den Steifigkeiten der Walkerschäfte und damit bei der jeweiligen mechanischen Widerstandsfähigkeit gegen externe Momente in der Sagittal- und Frontalebene (Abb. 5). Positiv auffällig ist hierbei insbesondere die massive Zunahme der Steifigkeit des „Rebound Air Walker“ bei höherer Krafteinwirkung.
Subjektive Beurteilung
Die subjektive Beurteilung von Tragekomfort und Stabilität durch die Probanden unterstreicht die biomechanischen Ergebnisse (Tab. 3). Acht der acht Befragten geben dem „Rebound Air Walker“ sowohl beim Tragekomfort als auch bei der Stabilität die beste Bewertung.
Diskussion
Aus den dargestellten Daten ergeben sich einige Implikationen für die Praxis. Grundsätzlich schränken alle untersuchten Walker die Bewegung der Gelenke in den untersuchten drei Ebenen ein. Die deutlichste Stabilisierung wird bei subjektiv hohem Tragekomfort durch den „Rebound Air Walker“ von Össur erzielt. Die subjektive Beurteilung von Tragekomfort und Stabilität durch die 8 Probanden korreliert hoch mit den biomechanischen Ergebnissen. Alle (8/8) der Befragten ordnen dem „Rebound Air Walker“ sowohl beim Tragekomfort als auch bei der Stabilität den Rangplatz 1 zu. Dieser Walker und der „AirSelect Elite“ von DJO zeigten in der Reihenfolge die besten Ergebnisse in Bezug auf die Bewegungseinschränkung des Sprunggelenks in der Sagittal- und Frontalebene. In Bezug auf die Transversalebene ist der „Rebound Air Walker“ mit deutlichem Abstand am effektivsten. Bei moderater Beanspruchung, etwa bei beidbeinigen Kniebeugen, gelingt es dieser Walker-Orthese am besten, in der sagittalen Ebene die Dorsalextension des Sprunggelenks einzuschränken und damit insbesondere die Achillessehne zu entlasten. Aber auch beim normalen Gang zeigt sich das größte Potenzial zur Drehmomentübernahme und damit zur Entlastung bei diesem Walker.
Die vorliegende Studie zeigt die generelle Eignung unterschiedlicher Walker zur Stabilisierung von Fuß und Sprunggelenk auf, weist aber aufgrund der heterogenen Ergebnisse auch auf relevante biomechanische Unterschiede hin, die durchaus klinisch relevant sein können. Eine Erweiterung der Stichprobe und des Prüfplans um klinisch validierte Fragen wird daher empfohlen, insbesondere um Effekte auf einem höheren Signifikanzniveau zu generieren und um klinisch relevante Unterschiede nachweisen zu können.
Fazit
Alle untersuchten Walker sind in der Lage, die Bewegungen des Sprunggelenks in allen drei Bewegungsebenen einzuschränken. Die subjektive Beurteilung von Tragekomfort und Stabilität durch die acht Probanden korreliert bemerkenswerterweise hoch mit den biomechanischen Ergebnissen. Die Messergebnisse zeigen eine Heterogenität hinsichtlich der Stabilisierungseffekte der unterschiedlichen Walker. Insgesamt zeigt jedoch der „Rebound Air Walker“ von Össur die größten biomechanischen Effekte. Die Ergebnisse weisen auf eine sinnvolle Erweiterung der Stichprobe hin, insbesondere um signifikante Effekte auf einem höheren Signifikanzniveau zu generieren und Unterschiede entsprechend belastbar nachweisen zu können.
Interessenkonflikt
Hauptautor Ingo Volker Rembitzki ist als Director for Medical Affairs bei der Firma Össur B. V. angestellt. Die Co-Autoren Christoph Becher, Thomas Stein und Andreas Gösele-Koppenburg geben an, dass Berater- oder Referentenverträge mit der Firma Össur bestehen.
Für die Autoren:
Ingo Volker Rembitzki, PT, MT
Director, Medical Affairs
Össur Europe B. V.
De Schakel 70
5651 GH Eindhoven, Niederlande
info@physioclinics.de
Begutachteter Beitrag/reviewed paper
Rembitzki I V, Becher C, Wisser A, Stein TH, Gösele-Koppenburg A. Biomechanische Evaluation unterschiedlicher Walker zur Belastungsreduktion an Achillessehne und Sprunggelenk. Orthopädie Technik, 2020; 71 (4): 58–64
| Bewegungsumfang [°] | ||||
|---|---|---|---|---|
| Mit Orthese | DJO (D) | Oped (O) | Össur (Ö) | Diff |
| ROMx | 1,48 ± 0,45 | 3,27 ± 0,16 | 2,46 ± 1,10 | O > Ö > D |
| ROMy | 2,89 ± 0,20 | 4,66 ± 0,05 | 2,44 ± 0,18 | O > D = Ö |
| ROMz | 4,01 ± 0,83 | 3,28 ± 0,78 | 2,47 ± 0,21 | D > O > Ö |
| Ohne Orthese | kontra-Iat DJO | kontra-Iat Oped | kontra-Iat Össur | |
| ROMx | 14,94 ± 0,45 | 19,05 ± 2,70 | 15,20 ± 2,02 | O > Ö = D |
| ROMy | 28,87 ± 12,47 | 28,43 ± 13,66 | 28,44 ± 13,56 | O = Ö = D |
| ROMz | 15,39 ± 7,01 | 15,65 ± 6,86 | 16,92 ± 5,01 | O = Ö = D |
| Externe Drehmomente Sprunggelenk [Nm/kg] | ||||
|---|---|---|---|---|
| Mit Orthese | DJO (D) | Oped (O) | Össur (Ö) | Diff |
| ROMx (O) | 0,20 ± 0,02 | 0,28 ± 0,02 | 0,29 ± 0,08 | Ö = O > D |
| ROMy (O) | 1,77 ± 0,01 | 1,36 ± 0,11 | 1,82 ± 0,08 | Ö > D > O |
| ROMz (O) | 0,11 ± 0,01 | 0,12 ± 0,04 | 0,10 ± 0,04 | Ö = D = O |
| ROMx (K) | 0,45 ± 0,12 | 0,27 ± 0,01 | 0,33 ± 0,01 | D > Ö > O |
| Ohne Orthese | kontra-Iat DJO | kontra-Iat Oped | kontra-Iat Össur | |
| ROMx (A) | 0,45 ± 0,03 | 0,55 ± 0,02 | 0,41 ± 0,11 | O > D > Ö |
| ROMy (A) | 1,45 ± 0,08 | 1,35 ± 0,23 | 1,43 ± 0,15 | D = Ö > D |
| ROMz (A) | 0,14 ± 0,03 | 0,13 ± 0,06 | 0,14 ± 0,06 | Ö = D = O |
| ROMx (K) | 0,68 ± 0,04 | 0,82 ± 0,19 | 0,70 ± 0,02 | O > Ö = D |
| Stabilität | Tragekomfort | |||||
|---|---|---|---|---|---|---|
| I (höchste) | II (mittlerer) | III (geringster) | I (höchster) | II (mittlerer) | III (geringster) | |
| DJO | 0 | 2 | 6 | 0 | 3 | 5 |
| Oped | 0 | 6 | 2 | 0 | 5 | 3 |
| Össur | 8 | 0 | 0 | 8 | 0 | 0 |



- Vergleichende Prüfung konventioneller und additiv gefertigter Prothesenschäfte in Anlehnung an DIN EN ISO 10328:2016 — 10. März 2026
- Easypreg – ein Faserverbundwerkstoff zum Tiefziehen — 9. März 2026
- Konservative Versorgung einer adulten Skoliose mit einem modularen Bausatz – ein Versorgungsbeispiel — 6. März 2026
- Bucksch S, Hoffmann N, Osterkamp N, Yilmaz S. Barmer Heil- und Hilfsmittelreport 2018. Berlin: Barmer, 2018. https://www.barmer.de/blob/195652/0674c58e62431dd80c2e9b77e4a71dcb/data/2019–01-16-barmer-heil–und-hilfsmittelreport-2019.pdf (Zugriff am 10.03.2020)
- Brechtel T, Kossack N, Grandt D. Barmer GEK Heil- und Hilfsmittelreport 2016. Berlin: Barmer GEK, 2016. https://www.barmer.de/blob/77942/a6a48386ab57c7c566b58166a86d75bf/data/pdf-barmer-gek-heil-und-hilfsmittelreport-2016.pdf (Zugriff am 10.03.2020)
- Sint A, Baumbach SF, Böcker W, Kammerlander C, Kanz KG, Braunstein M, et al. Influence of age and level of activity on the applicability of a walker orthosis – A prospective study in different cohorts of healthy volunteers. BMC Musculoskelet Disord, 2018; 19 (1): 1–9
- Gutsfeld P, Simmel S, Benning E, Brand A, Augat P. Orthesen in der Unfallchirurgie. Trauma und Berufskrankheit, 2016; 18 (2): 116–124
- Sint A, Baumbach SF, Böcker W, Kammerlander C, Kanz KG, Braunstein M, et al. Influence of age and level of activity on the applicability of a walker orthosis – A prospective study in different cohorts of healthy volunteers. BMC Musculoskelet Disord, 2018; 19 (1): 1–9
- Gutsfeld P, Simmel S, Benning E, Brand A, Augat P. Orthesen in der Unfallchirurgie. Trauma und Berufskrankheit, 2016; 18 (2): 116–124
- Franke J, Goldhahn S, Audigé L, Kohler H, Wentzensen A. The dynamic vacuum orthosis: A functional and economical benefit? Int Orthop, 2008; 32 (2): 153–158
- Arampatzis A, Brueggemann GP, Klapsing GM. A three-dimensional shank-foot model to determine the foot motion during landings. Med Sci Sport Exerc, 2002; 34 (1): 130–138
- Arampatzis A, Morey-Klapsing G, Brüggemann GP. Orthotic effect of a stabilising mechanism in the surface of gym-nastic mats on foot motion during landings. J Electromyogr Kinesiol, 2005; 15 (5): 507–515