Auf der Basis spezieller Sensorik und mit einem spielerischen Übungscharakter kann der Patient dadurch sein regelmäßiges Training auch im häuslichen Umfeld fortsetzen. Eine personalisierte Bewegungsanalyse sowie geeignete Feedbackmechanismen unterstützen den Rehabilitanden bei der Übungsausführung. Die zusammenfassende Darstellung der Übungsergebnisse ermöglicht dem Therapeuten, das Training entsprechend anzupassen. In dem Beitrag werden der entwickelte Prototyp sowie Ergebnisse von Anwendertests im Reha-Zentrum Lübben vorgestellt. Sie geben erste Hinweise auf die Akzeptanz des Systems.

Einleitung
In der Schlaganfall-Nachsorge oder bei Rückenmarksverletzungen nach einem schweren Unfall ist die rehabilitative Therapie nach Beendigung eines stationären Aufenthaltes noch lange nicht abgeschlossen 1. Die Durchführung nachstationärer Therapiemaßnahmen ist jedoch an entsprechende Einrichtungen gebunden, zu denen sich der Rehabilitand begeben muss. Insbesondere in ländlichen Gegenden ist für immobile und schwerstbetroffene Patienten der Zugang zur medizinischen Versorgung aufgrund langer Anfahrtswege mitunter schwierig 2. Im Projekt RehaInteract wurde daher ein interaktiver und sensorbasierter Therapieraum entwickelt, der therapeutische Maßnahmen zur Aktivierung sowohl der unteren als auch der oberen Extremitäten im häuslichen Umfeld eröffnet und somit eine Möglichkeit schafft, zeit- und ortsunabhängig rehabilitative Therapiemaßnahmen zur Verfügung zu stellen.
Im Laufe des Rehabilitationsprozesses nutzt der Patient das System zunächst in der Klinik, bevor er die Therapieumgebung in der nachstationären Behandlungsphase als neuartigen Trainingsraum in sein häusliches Umfeld integriert. Kliniken bietet das entwickelte System einen innovativen Ansatz, ihre bestehenden Therapieräume mit vernetzten und interaktiven Therapieobjekten und ‑geräten aufzuwerten und den Patienten bereits im stationären Behandlungsalltag eine attraktive und motivierende Form der Rehabilitation zu ermöglichen. Die betreuenden Ärzte und Therapeuten können mit dem System auch im Anschluss an die stationäre Behandlung den Kontakt zu Patienten aufrechterhalten und individuell über größere Entfernungen hinweg zusätzliche Betreuungsdienstleistungen anbieten.
Projektziele
Ziel von RehaInteract ist die Integration unterschiedlicher Sensorsysteme und Feedbackmechanismen in therapeutische Heil- und Hilfsmittel, um stark in ihrem Bewegungsradius eingeschränkten Menschen ein motivationales Umfeld für das tägliche Bewegungstraining zu schaffen. Das Projekt trägt somit dazu bei, die nachstationäre Versorgung im häuslichen Umfeld mit Hilfe einer Fernbetreuung durch Therapeuten zu verbessern, indem die Ausführung von Bewegungsübungen im häuslichen Umfeld mittels innovativer Informations- und Kommunikationstechnik, Sensorik und Motivationsmethodik so unterstützt wird, dass ein nachhaltiger, medizinischen Kriterien genügender Übungserfolg gewährleistet wird. Zur Erreichung dieses Ziels wurde ein Verbundprojekt durchgeführt, in dem medizinische Expertise (Reha-Zentrum Lübben), interdisziplinäre, anwendungsnahe IKT-Forschungskompetenz (Fraunhofer-Institut für Offene Kommunikationssysteme FOKUS), Entwicklungs- und Produktionserfahrung bezüglich Sensorik (Xybermind GmbH), langjährige Erfahrung in der Umsetzung in zwei- und dreidimensionalen Multimediaanwendungen auf der Basis komplexer User-Interfaces (Nuromedia GmbH) sowie Grundlagenwissen im Bereich medizinischer Sensornetze (TU Berlin) zusammenkamen.
Das Projekt kombiniert körpernahe und optische Sensorsysteme zur Messung und Bewertung therapierelevanter Bewegungsabläufe. Die Analyse der Bewegungen basiert auf Druck‑, Lage- und Beschleunigungssensorik, die in Alltags- und Therapiegegenständen integriert ist. Die optische Sensorik dient der verfeinerten Auswertung der Körperhaltung und trägt dazu bei, fehlerhafte Bewegungsausführungen zu vermeiden.
Eine einfach zu bedienende Benutzeroberfläche motiviert den Rehabilitanden, ein individualisiertes Training in spielerischer Form durchzuführen. Durch Feedbackmechanismen wird der Patient in Echtzeit angeleitet, gegebenenfalls sofortige Korrekturen einer Bewegung vorzunehmen. Für die Aktivierung der unteren Extremitäten wurde im Projekt prototypisch eine häusliche Gangschule entwickelt, die es erlaubt, anhand individuell einstellbarer, medizinisch valider Übungsparameter wie z. B. der Schrittlänge ein personalisiertes Training durchzuführen. Das entwickelte System basiert auf kostengünstigen Technologiekomponenten, die sowohl in der Klinik als auch im häuslichen Umfeld eingesetzt werden können.
Die RehaInteract-Trainingsumgebung
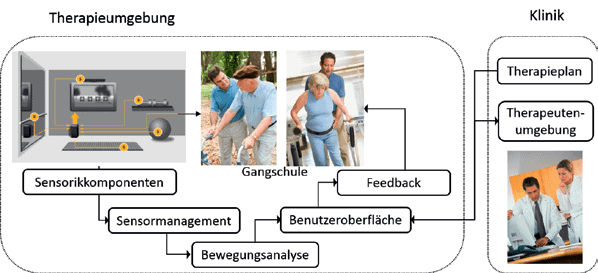
Die Trainingsumgebung RehaInteract, dargestellt in Abbildung 1, besteht aus einem Bildschirm, auf dem die spielerisch-interaktive Benutzeroberfläche dargestellt wird, einem PC, auf dem das Echtzeit-Feedback während der Trainingsausführung berechnet wird, und verschiedenen Sensorsystemen, die entweder im Raum installiert oder in Therapie- und Alltagsgegenstände integriert sind. Die Bewegung wird mit Hilfe von drei unterschiedlichen Sensorsystemen erfasst (siehe Abb. 2): optische Sensorik in Form der Kinect, zwei Schuhsohlen, in denen Druck und Lagesensorik integriert sind, und ein Wandschienensystem, die sogenannte Wollie-Action. Der Kinect-Sensor stellt dreidimensionale Positionsdaten der Körpergelenke eines Nutzers zur Verfügung. Auf Basis dessen können die Körperhaltung (z. B. Gleichgewichtsstörungen oder Instabilitäten im Oberkörper) und Schrittweiten des Patienten analysiert werden. Die Druck- und Lagesensorik, integriert in Schuhsohlen, dient der Erkennung der einzelnen Schritte sowie des Abrollverhaltens der Füße. Der Fußbereich wurde dazu in die drei Bereiche „medial“, „lateral“ und „Ferse“ eingeteilt und die Sohle entsprechend mit der Drucksensorik ausgestattet. Die Wollie-Action besteht aus einem Hand-Pad, welches in einem Wandschienensystem verankert ist. Die Pads können entlang der Schiene bewegt werden. Integrierte Drucksensorik in dem Hand-Pad erlaubt es, Aussagen zu treffen über die durch den Patienten ausgeübte Zug- und Druckkraft. Dadurch kann im Trainingsverlauf das Gleichgewicht des Rehabilitanden bewertet werden.
Therapiekonzept zur Aktivierung der unteren Extremitäten
Die multimodale Gangschule, wie sie im Projekt realisiert wurde, kann in verschiedenen medizinischen Teildisziplinen eingesetzt werden. So gehört die therapeutische Gangschule z. B. zu den standardisierten Therapien in der orthopädischen Rehabilitation nach Knochen- und Weichteilveränderungen (Frakturen, Muskelschwächen, Muskelkontrakturen), nach dem operativen Einsatz künstlicher Gelenke (TEP), nach Amputationen und dem daraufhin erfolgten Einsatz von Prothesen oder nach Verletzungen und der damit verbundenen Verwendung von Orthesen. Auch bei Arthroseerkrankungen der unteren Extremitäten und Fehlstellungen von Gelenken (Coxa valga, Coxa vara) kann eine multimodal konzipierte Gangschule Teil eines umfassenderen Therapieplans sein. Konventionelle Gangschulen gehören in den Therapieplan bei Lähmungen nach Nervenverletzungen (Paresen, Spastiken), bei Polyneuropathien (Gefühllosigkeit und Koordinationsschwäche, z. B. bei Diabetes mellitus), nach Schlaganfällen und bei zerebralen, degenerativen Erkrankungen (Morbus Parkinson, Alzheimer-Demenz). Auch der Einsatz in der geriatrischen Medizin ist denkbar. So spielt das Thema Sturzprävention eine große Rolle in der therapeutischen Versorgung älterer Menschen. Hier kann eine Gangschule eingesetzt werden, um Muskelstrukturen aufzubauen oder zu erhalten und um das Gleichgewicht beim Gehen zu trainieren (Abb. 3).
Die konventionelle Gangschule wurde im Projekt als Vorbild für die Entwicklung einer sensorgestützten, multimodalen Gangschule verwendet. Dazu definierten die Therapeuten am Reha-Zentrum Lübben zunächst die üblichen Parameter zur Beurteilung eines Gangbildes, um darauf aufbauend eine Sensorik zu entwickeln, die eine ortsunabhängige Beurteilung ermöglichen soll. Derzeit umfasst der Übungskatalog der Gangschule 9 Übungen zur Aktivierung der unteren Extremitäten. Die Übungen wurden nach Aspekten der therapeutischen Wirksamkeit zusammengestellt. Hierfür wurden Rumpfaktivität und ‑stabilität sowie einzelne Aktivitäten der Unter- und Oberschenkel und das Abrollverhalten der Füße berücksichtigt.
Folgende Übungen sind Bestandteil des Übungskataloges:
- Hockstreckballenstand (Ballenstand)
- Vorwärts-/Rückwärtsgehen
- Fußgymnastik (Stand/Sitz)
- Beinschwung
- Der Steiger
- Der Bein-Ab-/Adduktor
- Beinpendel an der „Wollie-Action“
- Seitwärtsgehen
- Kniehub an der „Wollie-Action“
Wie bei einer konventionellen, durch klinische Beobachtung kontrollierten Gangschule auch müssen für die Entwicklung einer technikgestützten Gangschule verschiedene Parameter erfasst werden. Für den Patienten und Therapeuten sind Informationen über Fußstellung, Beinachse, Abrollbewegung, Spurbreite, Schrittlänge und Schrittrhythmus, Bewegungsausmaß, Gelenkstabilität und Gewichtsverlagerung wichtig. All diese Parameter sind für die klinische Beurteilung des Gangbildes eines Patienten relevant und bilden die Grundlage für medizinisch-therapeutische Entscheidungen 34. Mit der Entwicklung des sensorgestützten Systems können diese wichtigen Parameter erfasst und bewertet werden.
Aus therapeutischer Sicht wird ein mehrdimensionales Feedbacksystem bevorzugt. Das Feedbacksystem sollte beim Trainieren eingreifen und therapeutische Anweisungen geben, um das avisierte Therapieziel zu erreichen. So sollte eine sensorgestützte, multimodale Gangschule optisches Feedback geben, wenn der Patient vor dem Bildschirm die Gangschule durchführt. Darüber hinaus bietet das System die Möglichkeit, die Motivation der Patienten zu steigern, da die Übungen in einer spielerisch-virtuellen Umgebung stattfinden.
Bei den Übungen für die unteren Extremitäten wird das Hauptaugenmerk auf starke Einschränkungen im Gangverhalten gelegt. Die Übungen der multimodalen Gangschule sind indikationsspezifisch speziell für die unteren Extremitäten ausgelegt. Über das Wandschienensystem erfolgt eine Kontrolle der Haltung (Oberkörperstabilität) durch die Hand, indem ein Gleichgewicht von Druck und Zug gemessen wird. Ein weiterer wichtiger Aspekt ist die Qualität der Bewegungsausführung. Um die Bewegungskontrolle zu gewährleisten, sind die Gelenkstellung, die Schrittlänge und die Position der Gelenke wichtige physiologische Parameter, die vom System erfasst und analysiert werden müssen.
Damit der Trainierende auf seine Gewichtsverteilung achtet, also sein Gleichgewicht kontrollieren kann, wurde ein Ampelfeedback implementiert. Durch farbige Abstufungen eines virtuellen Seiles (grün, gelb, rot), an dem der Patient sich während der Übungsausführung festhält, gibt das System Feedback, ob er dies korrekt im therapeutischen Sinne tut. Akustisches Feedback wird darüber hinaus eingesetzt, um therapeutische Anweisungen an den Anwender weiterzugeben und/oder motivierend auf ihn einzuwirken.
Bei der Übung „Vorwärts-/Rückwärtsgehen“ (Abb. 4) muss der Patient mit einer Hand die „Wollie-Action“ greifen und beim Laufen möglichst wenig Druck oder Zug auf die Handschlaufe bringen. Er geht dann mit einer optimalen Abrollbewegung in einer gleichmäßigen Geschwindigkeit über die in der Benutzeroberfläche vorgegebenen virtuellen „Steine“ vorwärts. Wenn der Patient den „Fluss“ überquert hat, geht er rückwärts zu seinem Ausgangspunkt zurück. Er muss dabei auf die vorgegebenen Steine achten und seine vorgegebene Schrittlänge halten.
Beim Beinpendel (Abb. 5) steht der Patient seitlich am Schienensystem und fixiert seine Hand an der „Wollie-Action“. Er verlagert sein Körpergewicht auf ein Bein und versucht, mit dem anderen Bein beim Auftauchen einer Blume vor seinem Avatar die Ferse aufzusetzen und die Blume so zu berühren. Beim Auftauchen einer Blume hinter ihm setzt er die Fußspitze auf und berührt die Blume mit dem Ballen. Dabei sollte darauf geachtet werden, dass die Hand in der Schlaufe so wenig wie möglich Druck oder Zug ausübt und das Gleichgewicht gehalten wird.
Bei einem regelmäßigen Training mit diesem System kann der Patient sein optimales Gangbild wiedererlangen und den Muskelstatus aufgrund der unterschiedlichsten muskulären Kontraktionsarten verbessern. Der motivationale Charakter dieses Systems soll dem Patienten ermöglichen, auch noch nach längeren Trainingsphasen mit Freude zu üben.
Systemarchitektur und entwickelter Prototyp
Das Gesamtsystem besteht aus einer sensorbasierten, interaktiven Übungsumgebung für Patienten, um das häusliche Training auszuführen, und einer webbasierten Umgebung für Therapeuten, um die Fernbetreuung des Trainings zu gewährleisten 5. Anhand der Sensordaten wird für alle Übungen erfasst, wie flüssig und sicher der Patient einzelne Schritte ausführt. Ebenso wird die Schrittweite gemessen und anhand der speziell entwickelten Übungen trainiert. Neben der Erfassung des Gangbildes ist die Erkennung möglicher Ausgleichsbewegungen aus therapeutischer Sicht wichtig. Die Hinweise im Programm erfolgen über Audio- und Texthinweise sowie über Feedbackmechanismen, die in die spielerische Übungsumgebung integriert wurden. Zur Interaktion steht sowohl den Patienten als auch den Therapeuten eine visuelle Benutzeroberfläche zur Verfügung.
Abbildung 6 stellt eine typische Kommunikation der einzelnen Systemkomponenten bei der Nutzung der Anwendung vor. Der von den Therapeuten angelegte und im Verlauf der Therapie angepasste Trainingsplan eines Patienten wird über den vorhandenen Therapieserver in die Übungsumgebung des Patienten übertragen, wodurch die multimodale Gangschule mit individuellen Trainingsparametern personalisiert wird. Die notwendige Sensorik wird durch das Sensormanagement integriert 6. Während der Übungsdurchführung werden die erfassten Daten aus den unterschiedlichen Sensoren der Bewegungsanalyse zur Verfügung gestellt. Nach Auswertung der Daten in Echtzeit werden dem Patienten über verschiedene Feedbackmechanismen (visuell, akustisch) fehlerhafte Ausführungen zur sofortigen Korrektur mitgeteilt sowie nach Beendigung des Trainings die Ergebnisse in aufbereiteter Form an die Therapeutenumgebung übertragen, sodass das medizinische Fachpersonal Einsicht nehmen und gegebenenfalls den Therapieplan adaptieren kann. Dabei können bestimmte Übungsparameter wie Anzahl der Schritte und Schrittweite modifiziert werden. Weitere medizinische Parameter der Gangschule setzen sich zusammen aus motorischen Fähigkeiten, bestehend aus Gleichgewicht, Koordination sowie Reaktion, und gangspezifischen Eigenschaften wie der richtigen Abrollbewegung der Füße bei der Ausführung eines Schrittes.
Bewegungsanalyse und Nutzerfeedback
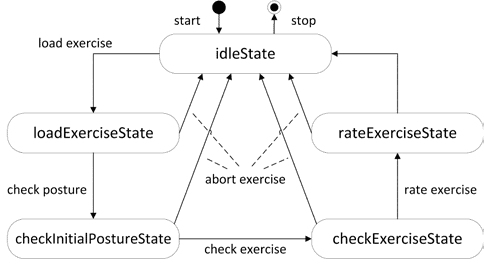
Die Arbeitsweise der Bewegungsanalyse wird bestimmt durch den in Abbildung 7 dargestellten sogenannten endlichen Automaten. Dieser Automat wird von der Benutzeroberfläche gesteuert. Nach Auswahl einer Trainingseinheit durch den Rehabilitanden wechselt der Zustand der Bewegungsanalyse von „idleState“ in „loadExerciseState“. Der individuelle Trainingsplan wird gelesen, und Übungen werden personalisiert. Im darauffolgenden Zustand „checkInitialPostureState“ wird überprüft, ob die für eine Übung definierte Ausgangsposition vom Trainierenden eingenommen wurde (z. B. parallele Anordnung der Füße und gerade Körperhaltung im Kontext der Gangschule). Die Klassifizierung und Analyse einer Bewegung innerhalb einer Übung wird im Zustand „checkExerciseState“ durchgeführt, und die daraus resultierenden Auswertungen werden als Trainingsergebnisse im Zustand „rateExerciseState“ zusammengefasst.
In den entsprechenden Zuständen der Bewegungsanalyse werden aktuelle Sensordaten im Abstand von 50 Millisekunden ausgewertet. Um die dynamische Entwicklung der Daten analysieren und somit den aktuellen Bewegungsausschnitt in Abhängigkeit zur Vergangenheit klassifizieren zu können, werden die vom Kinect-Sensor gemessenen Positionswerte in einem Puffer vorgehalten. Das Ergebnis einer Analyse – das vorliegende Ereignis und dazugehörige ausführliche Informationen – wird der Benutzeroberfläche zur Darstellung und zur Feedbackgebung mitgeteilt.
Die Hauptaufgaben der Bewegungsanalyse lassen sich wie folgt beschreiben:
- Sensorische Konfigurationen des Systems werden durch die Bewegungsanalyse ermittelt und mit dem Sensormanagement ausgehandelt (verfügbare Sensoren, Konfiguration von Sensoren).
- Die verschiedenen Sensordaten werden akkumuliert und qualitative Aussagen über die aktuellen (Bewegungs-)Vorgänge ermittelt (Vorwärts-/Rückwärtsschritt, Schrittlängen, Mittelwerte und Varianzen von Druckmessungen).
- Die Bewegungen werden klassifiziert, die Qualität der Bewegungsausführung sowie die Sensordaten werden an die Benutzeroberfläche zur Feedbackgenerierung und zur geeigneten grafischen Darstellung übergeben (vgl. Darstellungen von Druck und Zug in Abbildung 4 und 5 auf einer Farbskala).
In der multimodalen Gangschule wird der Handsensor „Wollie-Action“ für den Benutzer durch ein Seil simuliert. Es verhält sich dabei physikalisch wie ein richtiges Seil, indem es sich zu derjenigen Seite bewegt, in die es gezogen bzw. gedrückt wird. Die Qualität einer Ausführung wird dem Rehabilitanden per Ampelsystem angezeigt: Wird das Gleichgewicht gehalten, bleibt das Seil grün eingefärbt. Zulässige Krafteinwirkungen, definiert im personalisierten Trainingsplan, werden gelb dargestellt. Sind die Grenzen des erlaubten Drucks oder Zugs überschritten, wird das Seil rot koloriert. Schrittweiten werden durch die Abstände der Steine im Fluss dargestellt. Die Farben der Steine sagen aus, wie qualitativ entsprechend den Einstellungen im Trainingsplan ein Schritt ausgeführt wurde. Die Druckintensitäten der Fußbereiche werden durch Farbverläufe der visuellen Sohlenelemente angezeigt (siehe Abb. 5 links oben) und geben direktes Feedback über die Abrollbewegung bei der Ausübung eines Schrittes. Begibt sich der Rehabilitand in eine ungesunde Körperhaltung, wird er zusätzlich mittels akustischen Signalen darauf hingewiesen, um verletzende Ausführungen zu vermeiden. Die Bewertungen der einzelnen Übungsparameter sowie die zusammengefasste Beschreibung der Bewegungsausführungen (z. B. Anzahl der Schritte, Ausführungsdauer) werden dem behandelnden Therapeuten über die Therapeutenumgebung zur Verfügung gestellt, sodass eine zeit- und ortsunabhängige medizinische Betreuung gewährleistet wird.
Evaluation im Reha-Zentrum Lübben
Die Entwicklung des sensorgestützten, multimodalen Therapiesystems im Projekt RehaInteract wurde durch einen nutzerzentrierten Designprozess („usercentered design process“) begleitet. Das Gesamtsystem wurde im November 2015 im Reha-Zentrum Lübben installiert und anschließend über einen Zeitraum von drei Monaten evaluiert. Hierbei sollten in erster Linie Nutzerakzeptanz und Praktikabilität der entwickelten Systemkomponenten „Trainingsgerät“ und „spielbasierte Nutzeroberfläche“ sowie die Qualität der Bewegungskorrektur der entwickelten multimodalen, sensorgestützten Gangschule untersucht werden. An der abschließenden Evaluation nahmen N = 30 Probanden teil, die jeweils einen Fragebogen zum Therapiesystem ausfüllten und zusätzlich bei der Nutzung des Systems gefilmt wurden. Die Auswertung der so erhobenen Informationen erfolgte im Anschluss an die Testphase mit Hilfe der Ermittlung statistischer Kennwerte und eines Kategoriesystems für die Auswertung der Videostudien. Die Testungen fanden unter Aufsicht des medizinischen Personals statt.
Die getestete Stichprobe unterteilte sich in ca. 48 % Männer und ca. 52 % Frauen. Im Durchschnitt waren die Probanden ca. 42 Jahre alt, wobei die jüngste Probandin 16 Jahre alt war, die älteste 59. Folgende Skalen wurden zur Bewertung des Systems eingesetzt:
Als Testaufgabe für die multimodale Gangschule sollte eine Spielfigur (ein sogenannter Avatar) mit Hilfe der Sensoren und der eigenen Bewegungen durch eine interaktive Benutzeroberfläche gesteuert werden. Das Gleichgewicht konnte über das dargestellte Seil und die Fußsohlen eigenständig von den Probanden kontrolliert werden. Es wurde untersucht, inwieweit diese beiden Feedbackmechanismen, „Seil“ und „Fußsohlen“, dabei halfen, das Gleichgewicht zu halten und die Gewichtsverteilung zu kontrollieren. Ebenso wurde abgefragt, inwieweit das therapeutische Ziel der Gangschule nachvollziehbar ist. Im Folgenden werden die Ergebnisse der Fragebogenauswertung vorgestellt.
Das therapeutische Ziel der Gangschule, die mit der sensorgestützten Technik und der interaktiven Übungsumgebung umgesetzt wurde, konnte von den Probanden überwiegend erkannt werden. Sie antworteten auf das Item „Für mich ist gut nachvollziehbar, welches therapeutische Ziel mit dem Spiel erreicht werden soll“ im Durchschnitt mit „stimmt“ (MW 1,42; von „stimmt“ = 1 bis „stimmt nicht“ = 5). Ebenso konnten die Teilnehmer die drei spielbasierten Übungen selbstständig durchführen (MW = 1,81; von „sehr selbstständig = 1 bis „nicht selbstständig“ = 5), auch wenn sie weniger technikaffin waren. Hierbei muss allerdings berücksichtigt werden, dass die Probanden auf freiwilliger Basis an den Tests teilnahmen und sich sehr wahrscheinlich dazu von vornherein Menschen bereiterklärten, die eine gewisse Technikaffinität aufweisen. Die Info rmationen, die dem Probanden zu seiner erreichten Trainingsleistung durch das Therapiesystem übermittelt wurden, waren im Durchschnitt ausreichend, wie die folgenden Ergebnisse belegen:
Auf die Aussage „Meine erreichte Leistung wurde mir plausibel präsentiert, und ich konnte mit der Darstellung etwas anfangen“ antworteten die Probanden im Schnitt mit „stimmt überwiegend“ (MW 1,72; von „stimmt“ = 1 bis „stimmt nicht“ = 5). Aus der freien Antwortkategorie geht allerdings hervor, dass die Probanden sich bei der Präsentation ihrer erreichten Leistungen einen stärkeren therapeutischen Bezug und weniger eine spielerische Darstellung in Form von Punkten wünschen.
Die Kontrolle des Gleichgewichts während der Übungsausführung wurde über zwei Feedbacksysteme realisiert: zum einen über das oben erwähnte simulierte Seil, das seine Informationen aus Druck- und Zugsensoren erhält, zum anderen aus Drucksensoren, verbaut in Einlegesohlen, die dann grafisch als Füße auf dem Bildschirm präsentiert werden.
Die 30 Probanden äußerten sich zu der Aussage „Das virtuelle Seil half mir dabei, meine Gewichtsverteilung permanent zu kontrollieren“ auf einer 5‑stufigen Skala von „stimmt“ (1) bis „stimmt nicht“ (5) im Durchschnitt mit „stimmt überwiegend“ (MW 1,96). Das Item „Die auf dem Bildschirm sichtbaren Füße nutzte ich, um meine Gewichtsverteilung permanent zu kontrollieren“ beantworteten sie im Durchschnitt mit „weder/noch“ (MW 2,81; von „stimmt“ = 1 bis „stimmt nicht“ = 5).
Die Auswertung der Items zeigt, dass das Seil eher zur Orientierung genutzt wurde als die Füße. Die Diskrepanz zwischen den beiden optischen Feedbackmechanismen „Seil“ und „Fußsohlen“ kann damit erklärt werden, dass es ohne anhaltende Übungseffekte durch die längerfristige Nutzung des Systems zunächst schwierig für den Anwender ist, sich auf beide Mechanismen gleichzeitig zu konzentrieren. Die freien Antworten gaben Aufschluss darüber, dass die Probanden sich bei der Bewältigung der Übungen zunächst auf den Avatar konzentrierten und die optische Feedbackgebung anhand der dargestellten Füße kaum wahrnahmen. Während es beim Seil eine optische Verbindung zwischen Avatar und Seil gibt, nämlich dergestalt, dass sich der Avatar mit der Hand am Seil festhält, wurden die Fußsohlen separat visualisiert. Die optische Verbindung von Avatar und Seil erklärt möglicherweise, warum die Testnutzer eher das Seil zur Gleichgewichtskontrolle benutzten als die Fußsohlen, bei denen es keine sichtbare Verbindung zum Avatar gab. Es kann aber erwartet werden, dass dieser Unterschied mit zunehmender Übung verschwindet.
Die Auswertung der freien Antwortkategorien im eingesetzten Fragebogen ergab zudem Hinweise seitens der Probanden, wie die therapeutische Zielsetzung besser erklärt und die Leistungsrückmeldung weiter verbessert werden könnten. So würden selbstbestimmt abrufbare therapeutische Erklärungen im Vorfeld einer jeden Übung helfen, das jeweilige therapeutische Ziel noch genauer zu bestimmen. Einige Probanden gaben zu Protokoll, dass vor dem Start der Übung ein Sprecher das therapeutische Ziel erklären könnte. Die Leistungsrückmeldung könnte durch farbige Balken ergänzt werden.
Die Auswertung der Gesamtbewertung von Trainingsgerät und interaktiver Trainingsumgebung ergab, dass die Probanden die technische Verwendung von Hand-Pads (MW 1,85), verankert in einem Wandschienensystem, und Schuhen mit der verbauten Drucksensorik in den Einlegesohlen (MW 2,38) von „leicht“ bis „weder/noch“ beurteilten (auf einer Skala von „sehr leicht“ = 1 bis „sehr schwierig“ = 5). Diese Werte können verbessert werden, indem die Sensibilität vor allem der Hand-Pads weiter verbessert wird, sodass die ausgeübten Druck- und Zugbewegungen auf die Hand-Pads besser auf die Spielfigur übertragen werden. Auch aus den Videoanalysen geht hervor, dass die Bewegungen nicht immer auch Reaktionen in der Benutzeroberfläche zur Folge hatten. Dies erklärt auch, warum die Probanden die Frage danach, wie leicht sie es technisch fanden, die Spielziele unter Verwendung der Sensorik zu erreichen, im Durchschnitt mit „weder/ noch“ (MW 2,42; von „sehr leicht“ = 1 bis „sehr schwierig“ = 5) beurteilten.
Insgesamt kann aber festgehalten werden, dass das entwickelte Gesamtsystem auf Akzeptanz seitens der Nutzer gestoßen ist, die noch verbessert werden kann, wenn die Hinweise der Akzeptanztestungen ihren Weg in die technische Weiterentwicklung finden.
Zusammenfassung und Ausblick
In diesem Beitrag wurden die Entwicklungsarbeiten sowie die Funktionsweise einer multimodalen Gangschule zur Aktivierung der unteren Extremitäten dargestellt. Hierfür wurden das Therapiekonzept mit den einzelnen Übungen sowie die zu analysierenden Bewegungsabläufe erläutert. Ebenso wurde der Programmablauf für die Ausführung einer Übung der Gangschule wiedergegeben und die einzelnen Verarbeitungsschritte der Bewegungsanalyse beschrieben, die zu der Feedbackgebung an den Nutzer führt. Abschließend wurden erste Ergebnisse aus Akzeptanztestungen im Reha-Zentrum Lübben präsentiert.
Mit der Evaluation konnte nachgewiesen werden, dass das System bei den Nutzern überwiegend auf Akzeptanz stößt. Einzelne Rückmeldungen der Nutzer bieten geeignete Hinweise, das Gesamtsystem in Folgeprojekten zu optimieren. Die Projektergebnisse sollen Anwendern auch über die Projektlaufzeit hinaus demonstriert werden. Hierfür werden die Projektpartner die entsprechenden Systemaufbauten vorhalten. Das langfristige Ziel ist es, das entwickelte Bewegungsprogramm von RehaInteract zu erweitern und in der Versorgungsstruktur des Gesundheitswesens zu verankern.
Für die Autoren:
Dr. Michael John
Fraunhofer FOKUS
Kaiserin-Augusta-Allee 31
10589 Berlin
michael.john@fokus.fraunhofer.de
Begutachteter Beitrag/reviewed paper
John M, Kock G, Häusler B, Grohnert A, Liebach J, Wolschke M, Smurawski A, Sommerfeld K. Das Projekt RehaInteract – Entwicklung einer sensorbasierten Gangschule zur Aktivierung der unteren Extremitäten. Orthopädie Technik, 2016; 67 (9): 18–23







- Entwicklung eines zum physiologischen Gangbild kongruenten polyzentrischen Knieorthesengelenks – Zwischenstand eines Forschungsprojektes — 10. April 2026
- Mikroprozessorgesteuerte stand- und schwungphasenkontrollierte Ganzbeinorthesen (SSCO): Entwicklung, Systeme und Versorgungsrealität in der orthopädietechnischen Praxis — 9. April 2026
- Gips oder Orthese bei distalen Radiusfrakturen? — 8. April 2026
- Welsch N. Leben ohne Tod? Forscher besiegen das Altern. Berlin, Heidelberg: Springer Spectrum, 2015
- Hamdi O, Chalouf MA, Ouattara D, Krief F. eHealth: Survey on research projects, comparative of telemonitoring architectures and main issues. Journal of Network and Computer Applications, 2014; 46: 100–112
- Perry J. Ganganalyse. Norm und Pathologie des Gehens. München: Urban & Fischer Verlag, 2003
- Götz-Neumann K. Gehen verstehen. Ganganalyse in der Physiotherapie. Stuttgart: Georg Thieme Verlag, 2003
- Grohnert A, Boelke A, Haeusler B, Irmscher B, John M, Kliem A, Kock G, Piesk J, Polak M. RehaInterAct – Der sensorbasierte Therapieraum der Zukunft. In: Weisbecker A, Burmester M, Schmidt A (Hrsg.). Mensch und Computer 2015. Workshop: Fachkonferenz Mensch und Computer 2015, 06–09 September 2015, Stuttgart. Berlin: De Gruyter Oldenbourg, 2015: 595–604
- Kliem A, Boelke A, Grohnert A, Traeder N. Self-adaptive middleware for ubiquitous medical device integration. IEEE 16th International Conference on e‑Health Networking, Applications and Services (Healthcom), 15–18 October 2014. Natal, 2014: 298–304
